На следващата петъчна вечер авторът искаше да събере нещо интересно. Спомняйки си, че той видя проектите за теглене на роботи и притежаващ серво за непрекъснато въртене, беше решено да сглоби такъв робот. Серво за непрекъснато въртене може да се направи от обикновени.
материали:
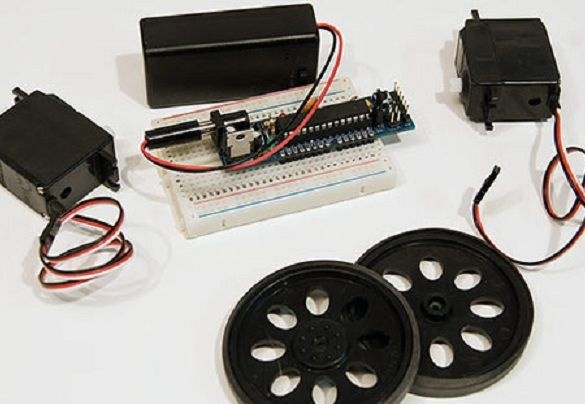
- DC Boarduino (това е клон Arduino)
- Серво на непрекъснато въртене от 2 броя
- Серво джанти 2 бр
- дъска
- 9V конектор за акумулатор с 2,1 мм щепсел и превключвател
- свързващи проводници
Не е необходимо да се използва Boarduino в този проект, всеки Arduino дъска е достатъчен. Авторът избра тази дъска заради размерите си. Ще ви трябват и определен брой маркери, можете да закупите набор от различни цветове за този робот.
В допълнение, имате нужда от 9V батерия и основата за тялото на рисуващия робот.
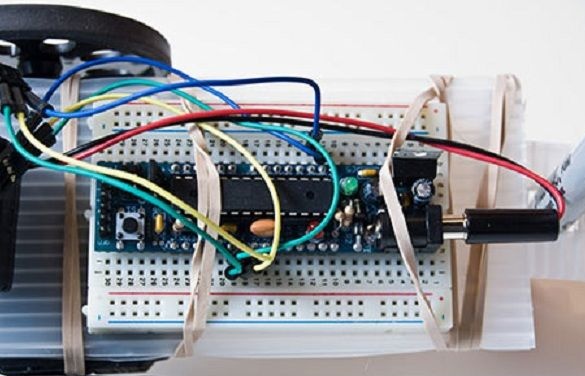
Няма нищо сложно в монтажа на робота. На първо място, авторът закрепва колелата с два сервомашини с лепяща лента и измерва разстоянието между колелата. Необходимо е ширината на основата да е малко по-малка от разстоянието между колелата. Авторът използва гофрирана пластмаса, тъй като е доста лека и издръжлива и не е трудно да се работи с нея. Използването му, разбира се, не е от съществено значение, можете дори да използвате картон или пластмаса от калъфи за дискове.
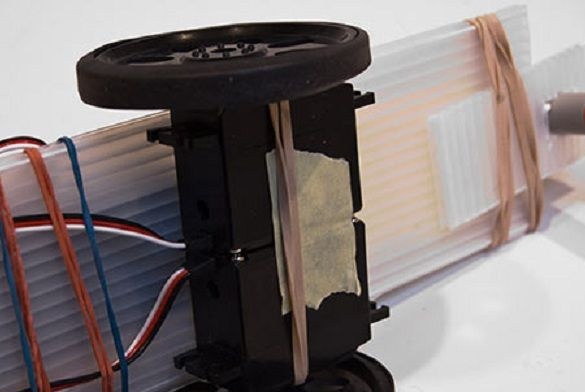
Серво задвижванията бяха свързани към основата с гумени ленти. При поставянето на батерията и дъската възникнаха трудности, тъй като беше необходимо да се поддържа баланс. Авторът искаше да направи повече място от страната, с която е поставен маркерът, но не искаше да направи предимство от противоположната страна. С помощта на гумени ленти е доста просто да се регулира местоположението на компонентите, като се определи оптималното.
По време на целия проект се използват проводници с BLS щифтове за свързване към дъската, серво задвижванията също са свързани с тях.
Когато авторът завършил цялата работа по сглобяването на робота, той веднага искал да провери неговото изпълнение. Отне известно време за търсене на кода. След като се натъкна на статия за контролиране на Servo за непрекъснато въртене Parallax с Arduino, той разбра, че е на правилния път. Кодът е опростен възможно най-много, в момента Drawbot може да пътува само в кръгове.Разбира се, това е примитивно, но също така е чудесно начало и основа за развитие и модернизация. Кодът може да бъде изтеглен под статията.
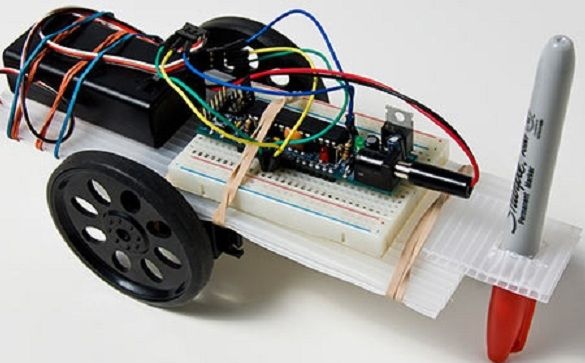
Сега авторът е получил робот, който пътува в кръг. Продължавайки работата, авторът взел останките от велпапе и направил дупка в нея с помощта на нож. Дупката беше изрязана с диаметър, малко по-малък от необходимия, благодарение на намаления отвор маркерът в нея беше перфектно прикрепен. Ако използвате картон, този ефект няма да бъде и маркерът няма да се държи добре или да не изпадне.

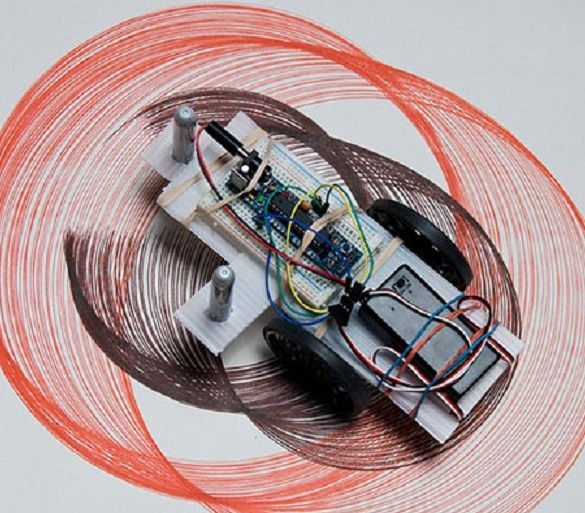
След инсталирането на маркера е време да тествате робота. Поставяйки го в центъра на листа 24x18 и го включва, най-накрая авторът видя Drawbot в действие. Започна да върти кръгчета за рисуване. Можем да кажем, че авторът успя да създаде робот, който създава един вид произведение на изкуството.
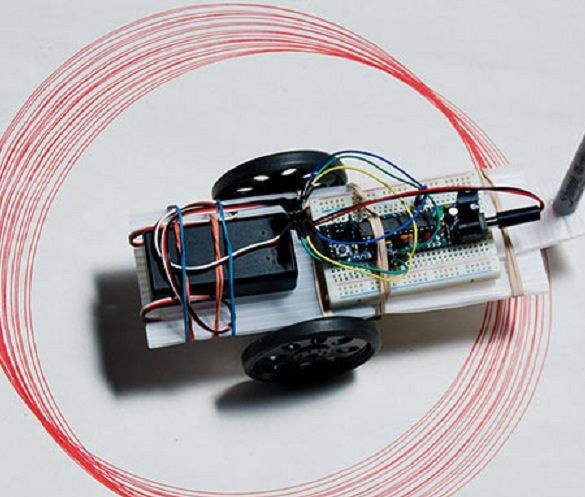
Картината излезе малко неудобно поради чаршафа, лежащ на пода, и не беше съвсем равномерен и най-вероятно сервовете не се въртяха синхронно. Оказа се, че един кръг може да бъде по-нисък, вторият по-висок, а следващият все още малко по-висок или по-нисък. Вероятно на идеално място всички кръгове биха били подравнени в един ред. На външен вид ще изглежда по-красиво.
Авторът смята, че вторият маркер може да озари ситуацията и роботът ще направи по-интересни снимки. Резултатът беше добър, кръговете започнаха да се пресичат помежду си. Ще бъде по-интересно да видим как Drawbot се държи на голям лист хартия.
Освобождавайки робота върху хартиена повърхност, авторът може да получи кръг или куп кръгове. Но като имате готов робот, вече можете да мислите как да го подобрите, като промените кода.