

Взех част от дизайна си от инструкциите за монтаж на Lego Technic 42049 и Lego Technic 42041. Останалото е моята импровизация. За контрол ще използвам Bluetooth модула, свързан с андроид устройството или компютъра. Така че се нуждаем от:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- драйвер на двигателя L9110S
- 1 серво задвижване SG-90
- Bluetooth модул HC-05 или еквивалентен
- USB-UART за фърмуер за arduino
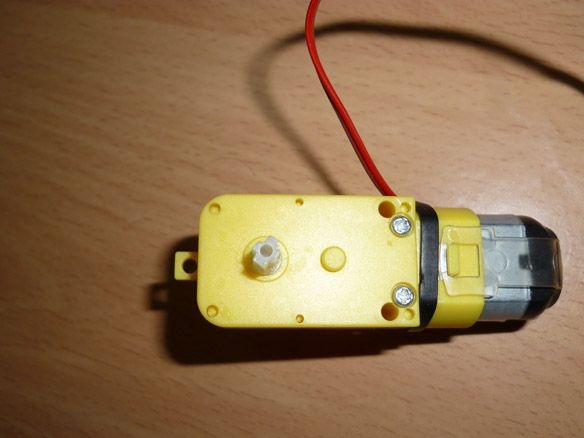
- моторна скоростна кутия 6v 1: 150 100 об. / Мин
- 2 светодиода
- 2 резистора 150 ома
- Кондензатор 10v 1000uF
- 2 едноредови гребена PLS-40
- Индуктор 68mkGn
- 6 NI-Mn 1.2v 1000mA батерии
- Съединител татко-мама два пина за проводник
- Хомутик
- Проводници с различни цветове
- спойка
- Розин
- поялник
- Болтове 3х20, гайки и шайби за тях
- Болтове 3х40
- Болтове 3х60
Стъпка 1 Монтаж на задната ос
Придвижването напред - назад ще се осъществява от зъбен двигател с 6V мотор, предавателно отношение 1: 150 и празен ход 100 оборота в минута. Можете да опитате друго предавателно отношение, но според мен това е оптимално. Оста на скоростната кутия от двете страни трябва да бъде изрязана във формата на кръст и да се поставят детайли на лего:
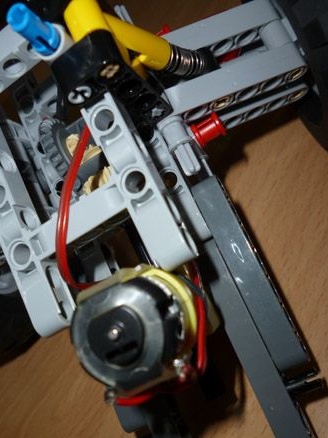
След това ние събираме основата на задната ос съгласно инструкциите на Lego 42029 част 1, като се започне от 3 страници до 8 включително. И добавете няколко детайли, за да можете да инсталирате двигателя и скоростната кутия.
Вижте онлайн файла:
Вижте онлайн файла:



Стъпка 2 Сглобяване на предна ос
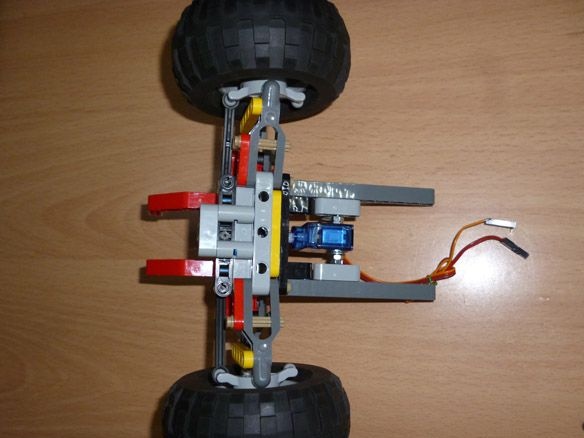
Сглобяваме предната част на окачването съгласно инструкциите на Lego 42029, част 1, от страница 21 до 23. Взимаме трапецовида от втората част на Lego от страница 6 до 11. Servo SG-90 е много подходящ за завъртане на колелата. За да го фиксирате върху нашия модел, е необходимо внимателно да пробиете, за да не докосвате вътрешните части на сервото, проходен отвор с диаметър 3,2 мм или просто да го изрежете с канцеларски нож. И също така отрежете стърчащите части („крила“ за закрепване). Вмъкваме болт в направения отвор и го фиксираме с гайки. Върху серво вала, ние поставяме лост с винтова част от лего:





Стъпка 3 Сглобяване на основата и кабината
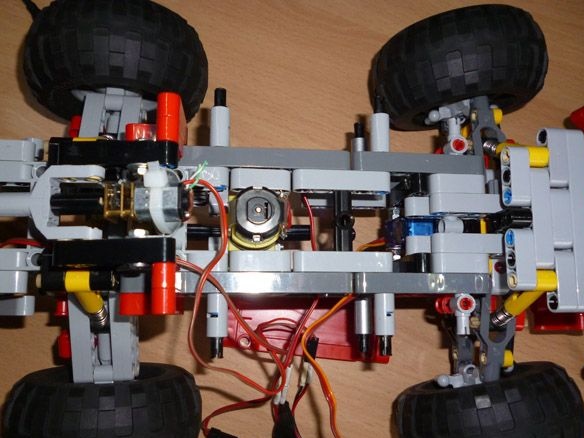
Свързваме двата моста, както е показано на снимката:
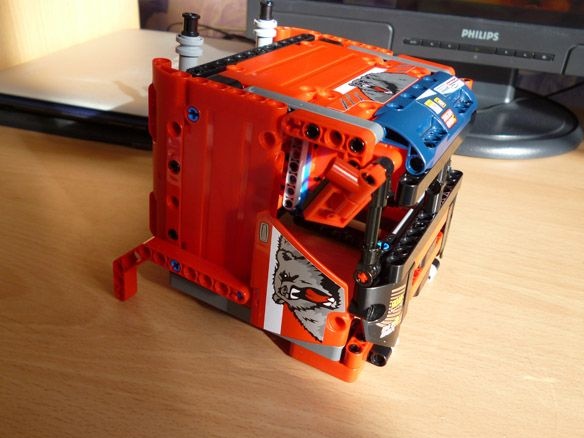
Сглобяваме кабината според инструкциите на Lego 42041. Започвайки от страници 39 до 47 на първата част. По-нататък от страница 5 до 28 на втората част. Както и бронята на страници 38 до 43 от втората част на инструкциите.
Вижте онлайн файла:
Вижте онлайн файла:


Вижте онлайн файла:
Вижте онлайн файла:
Стъпка 4 Електрика
За контрол ще използваме Arduino Pro Mini и Bluetooth модула. Pro Mini може да бъде заменен с всяка друга дъска на Arduino. Избрах Pro Mini, така че той е най-малкият. За свързването на двигателя е необходим драйверът на двигателя.
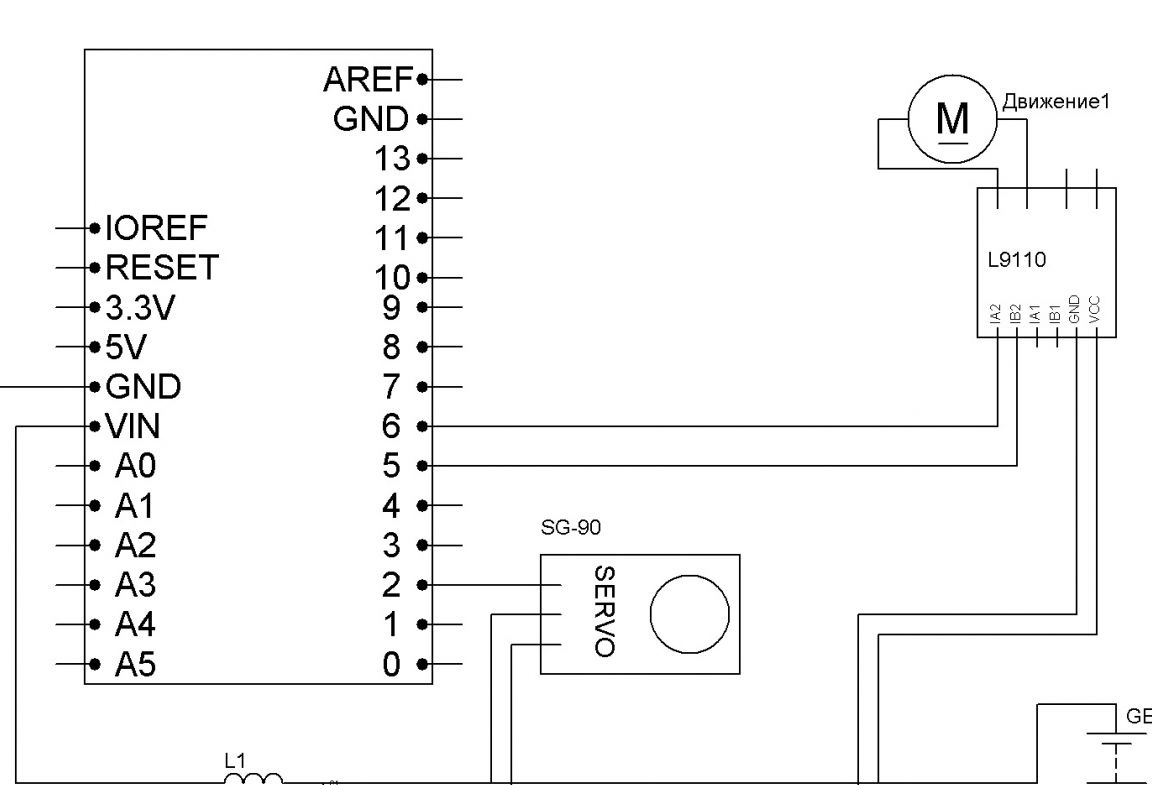
Свързване на всички компоненти с проводници Dupont майка-майка. Мощност - 6 NI-Mn 1.2v 1000mA батерии, свързани последователно. Кондензатор с всяка ниска мощност, индуктор също ще намерите, трябва да стабилизирате мощността на микроконтролера. Анодите на двата светодиода са свързани към 4-пинов ардуино, катодите към GND. Резисторите са избрани за използваните светодиоди. За удобство махнете батериите с тиксо.

Ние лепим всичко на двустранна лента на базата на:
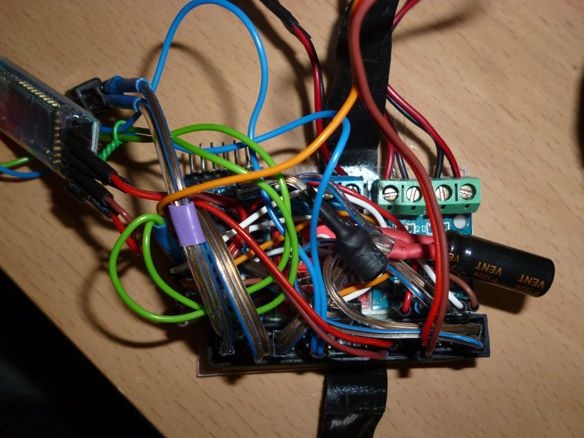
Поставяме нашия електротехник между колелата и затваряме:
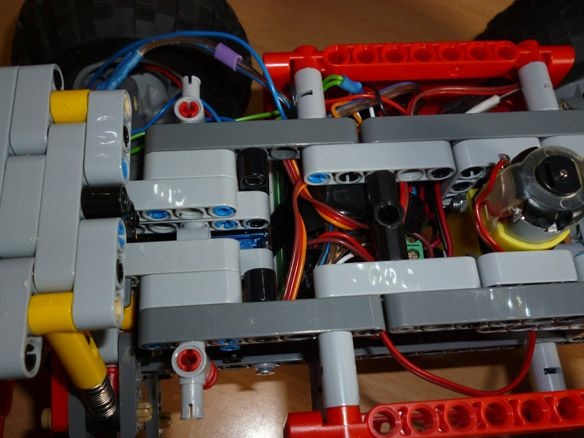
Добавете няколко щриха:


Стъпка 5 Настройка на Bluetooth
Най-достъпните Bluetooth модули днес са HC-05 и HC-06. Те са в изобилие в китайските онлайн магазини. Разликите между тях са, че първият може да работи както в режим master (подчинен), така и в режим slave (master). Второто е чисто робско устройство. С други думи, HC-06 не може да открие сдвоено устройство и да установи връзка с него, той може да се подчини само на главния.
Кратки характеристики на модулите:
- Bluetooth чип - BC417143, произведен от
- комуникационен протокол - Bluetooth спецификация v2.0 + EDR;
- радиус на действие - до 10 метра (ниво на мощност 2);
- Съвместим с всички Bluetooth адаптери, които поддържат SPP;
- Количеството флаш-памет (за съхранение на фърмуер и настройки) - 8 Mbit;
- честотата на радиосигнала - 2,40 .. 2,48 GHz;
- хост интерфейс - USB 1.1 / 2.0 или UART;
- консумация на енергия - токът по време на комуникация е 30-40 mA. Средната стойност на тока е около 25 mA. След установяване на връзката консумацията на ток е 8 mA. Няма режим на заспиване.
Обикновено модулите се продават като две дъски, споени заедно. По-малкият е фабричен модул, широко използван в различни електронен устройства. Големи - специална дъска за направи си сам.
Ето как изглеждат модулите HC-05 и HC-06 "Направи си сам":
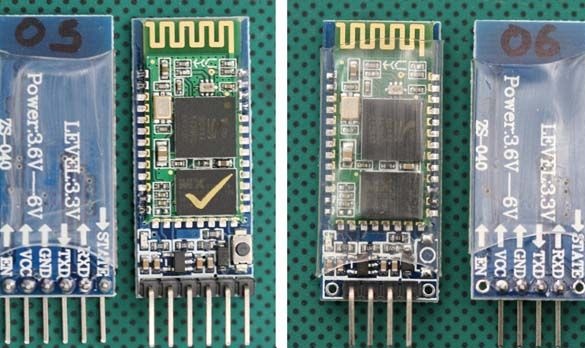
По принцип можете да използвате всеки модул, който харесвате. Модул без дъска струва по-малко, но тогава ще трябва да се погрижите за захранването от 3,3 V за модула и да се измъчвате чрез запояване на проводници към модула. Избрах оптималното според мен съотношение цена / функционалност HC-06.
Свързваме се както следва:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
За правилна работа модулът трябва да бъде конфигуриран. Ще конфигурираме AT команди, въведени в прозореца на терминала. Давам пример за настройка на модула HC-05. Ако имате различна настройка може да е различна. За да може модулът ни да получава команди, първо флаш Arduino със следния фърмуер:
В този случай Arduino играе ролята на мост между компютрите и модула. Във фърмуера използвам библиотеката на SoftwareSerial. При високи скорости работи нестабилно. Ако искате висока скорост, можете да свържете модула директно към Arduino RX и TX контактите и да пренапишете фърмуера. Но в моя случай ще работим с модула със скорост 9600. Така че след фърмуера, отворете терминала и въведете:
“AT” (без кавички) трябва да дойде отговорът “OK” (това означава, че всичко е свързано правилно и модулът работи)
“AT + BAUD96000” (без кавичките) отговорът “OK9600” трябва да дойде.
Ако имате правилния отговор, преминете към следващата стъпка.
Стъпка 7 Фърмуер
За да напиша фърмуера и самия фърмуер, използвам Arduino IDE. Текущата версия за днес е 1.8. Всъщност фърмуер:
Стъпка 8 Настройте телефона си.
На телефон с Android трябва да инсталирате програма за управление на робота чрез Bluetooth. Има ги много. Можете да въведете „Bluetooth Arduino“ в Google play и да изберете по ваш вкус. Хареса ми BT контролера. Изтеглете и инсталирайте на вашия телефон или таблет с Android. На следващо място, чрез настройките на Android, трябва да установите връзка с нашия модул. Паролата за връзката е „1234“ или „0000“. След това конфигурирайте програмата за съответните команди. Списъкът е по-долу.
Стъпка 9 Компютърна настройка (ако е необходимо)
Ако е необходимо или просто удобство за контрол, можете да използвате компютър или лаптоп. За да направите това, компютърът трябва да има Bluetooth. Ние установяваме комуникация с нашия модул чрез контролите на компютъра. След това ни трябва терминал за изпращане на команди. Всеки удобен за вас.След запис на фърмуера, контролът се осъществява чрез следните бутони (команди):
W - напред
S - обратно
А - вляво
D - правилно
F - стоп
G - волан
К - фарове
L - изключен фар
Постоянното въвеждане на команди е неудобно, затова препоръчвам да използвате програмата за изпращане на команди. Използвам Z-Controller. В програмата изберете порта (com порт, през който се осъществява връзката) и конфигурирайте клавишите за командите. Настройте празен и интуитивен.
