

Роботът Направи си сам чудесна играчка за деца, също с нея можеш да играеш роднини или приятели. Същността на робота е следната. Това е кутия с превключвател. Щом някой натисне ключа на кутията, започва да се отваря врата, от която ръката излиза и връща превключвателя в първоначалното си състояние. Въпреки външната простота на робота, всъщност всичко това изглежда доста смешно.
Основата за създаване на робот е схема Arduino, Има и някои механични елементи, които ще бъдат разгледани по-долу. Нека разгледаме по-подробно как може направете го сами сглобете такъв робот.
Материали и инструменти за производство:
- Arduino дъска, всяка с PWM изходи ще направи;
- серводвигатели, две части (подходящи модела Futaba - S3003, мощността на такъв двигател е достатъчна за отваряне на вратата, устройството произвежда до 3,2 кг / см мощност);
- батерии;
- превключвател тип SPST или SPTT;
- превключвател за управление на мощността на батерията;
- имате нужда от бутон, за да рестартирате Arduino;
- проводници, джъмпери и други малки неща.

Освен това ще ви трябва допълнително скоростна кутия (подходяща за радиоуправляеми автомобили), платка за електромотор, наречена Arduino motor щит, RC серво мотор. Тези компоненти са необходими, за да може кутията да се движи, като автора.
За да се намали нивото на шума по време на работа на устройството, са необходими кондензатор с електролитен тип с номинална стойност 10mF, 10K резистор и инвертор 74HC04.
Производственият процес на робота:
Първа стъпка. Как да си направим кутия
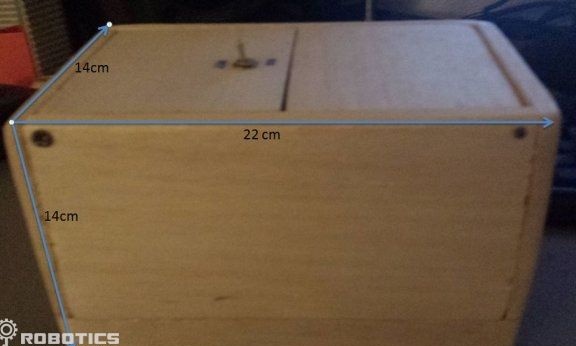
За да създадете кутия, тоест тяло на робота, трябва да намерите шперплат или корк. Освен това се нуждаете от мощно лепило за залепване на дърво. Важно е да се разбере, че колкото повече тежи структурата, толкова повече енергия ще се изразходва. Що се отнася до размера на кутията, тя е 22см х 14см х 14см.
Стъпка втора Принципна схема електронен части
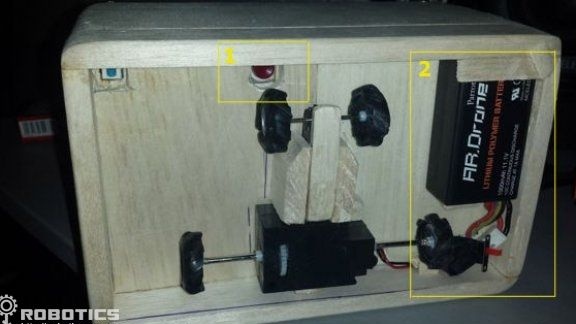
Горната част на робота включва главна платка на Arduino, два сервомера и превключвател. Що се отнася до веригата, която е отговорна за количеството шум, тя може да бъде заменена с обикновен резистор.
Серво задвижванията се захранват през петия щифт на дъската Arduino. Що се отнася до сигналните проводници, те са свързани към контакти 9 и 10. Благодарение на тези PWM контакти, ъгълът на въртене на сервомоторите се контролира. Това е ъгъл от 0 до 180 градуса.
Червеният бутон е необходим, за да рестартирате Arduino.
В долната част на веригата е дъската за щит на двигателя Arduino.На дъската можете да видите два канала, A и B, благодарение на тях, ако желаете, можете да свържете два мотора наведнъж. Основната задача на този борд е, че с него можете да зададете програмно скоростта на въртене, посока, почивки за всеки канал на двигателите. Ако погледнете диаграмата, тогава се използва канал B, докато контакт 13 определя посоката, контакт 11 е скорост, а контакт 8 се използва за управление на спирачките.
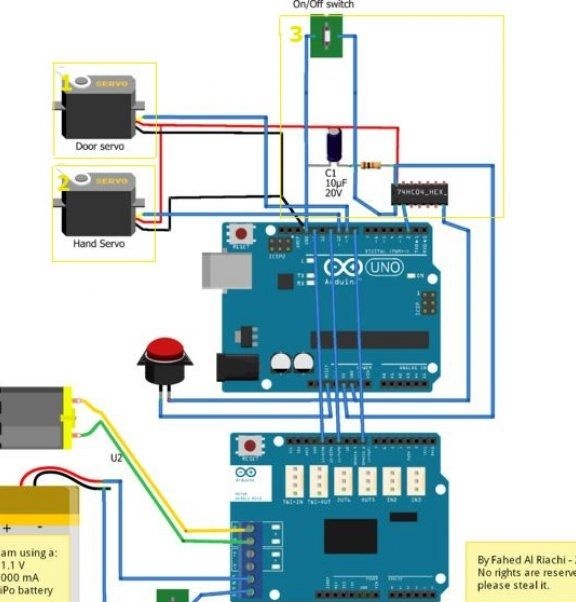
Източникът на захранване е 11,1 / 1000 mA батерия, той се свързва към дъската на екрана на двигателя Arduino. Ако няма да се използва, батерията е директно свързана към основната платка.
Стъпка трета Монтаж на двигателя
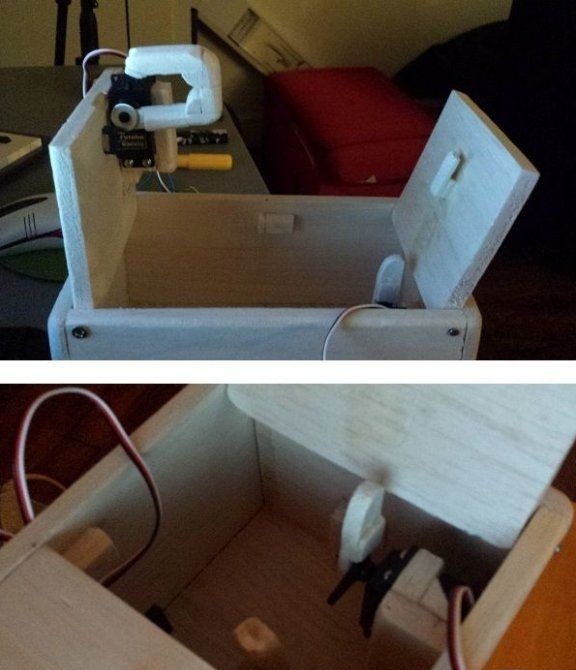
Серво задвижването и ръцете са инсталирани експериментално, трябва да проверите на практика дали механиката работи правилно. За да проверите радиуса на отклонение на двигателите, можете да използвате програмата Arduino IDE.
За производството на дървени ръце от всякакъв вид. Основното е, че е леко, тъй като в противен случай консумацията на енергия ще се увеличи. Що се отнася до размера на ръката, той се регулира по време на инсталирането, като се избере желаната дължина, се постига желаният ефект.
Буталото и ръката на капака са монтирани така, че да не докосват сервомотора по време на работа.
Стъпка четвърта Свързваме серводвигателя и превключваме към Arduino
Използвайки проводници и джъмпери, трябва да свържете всички електронни елементи помежду си според определената схема. Проводниците трябва да бъдат положени така, че да не пречат на подвижните елементи на робота.
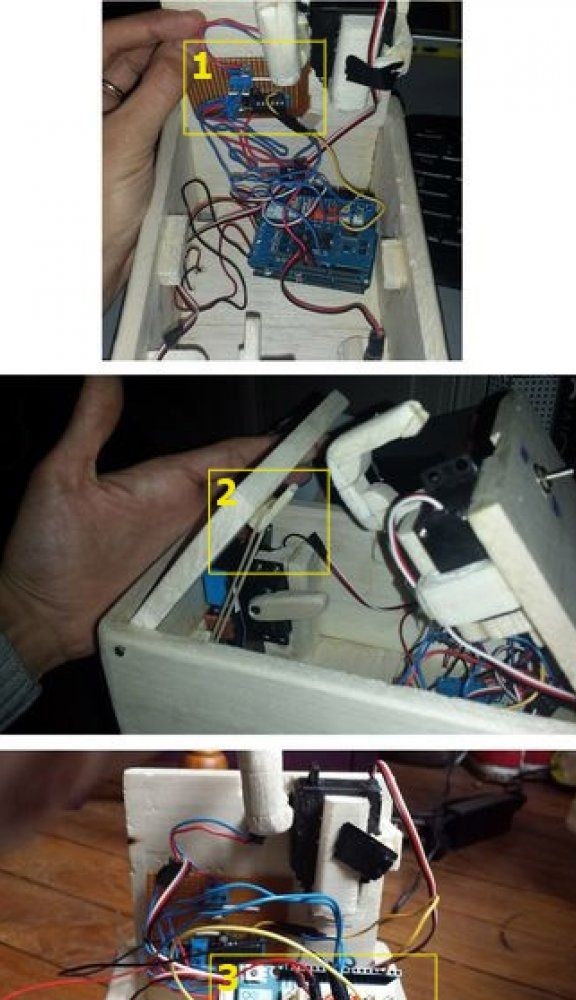
Под номер 1 можете да видите как е свързан и къде се намира превключвателната верига. Номер 2 маркира такъв елемент като еластична лента, той е необходим, за да може вратата да се отвори с известно напрежение. Е, числото 3 показва щита на двигателя, инсталиран на Arduino.
Стъпка пета Монтаж на механичната част за преместване на кутията
В долната част на кутията има батерия, двигател с колела, скоростна кутия, бутон за нулиране и превключвател за превключване за контрол на мощността на робота. Преди да прикрепите елементите, трябва да изчислите баланса на теглото на кутията. За да може роботът да е стабилен, в допълнение към водещата ос се монтира още една.
Стъпка шеста Друга допълнителна функция
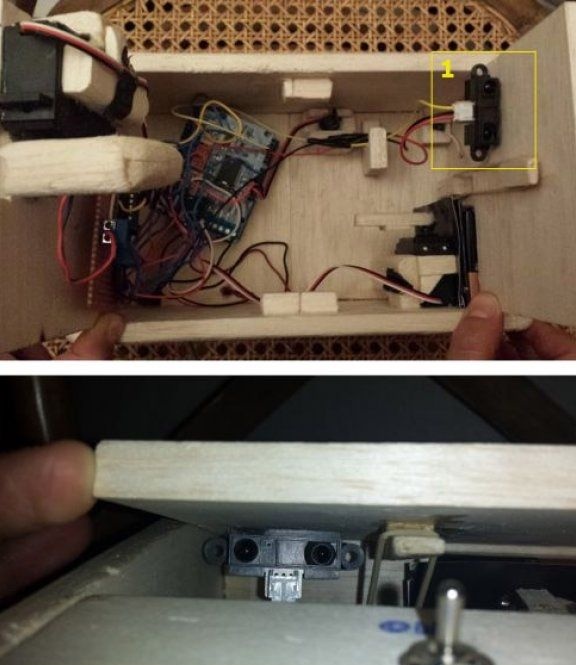
За да може роботът да определи посоката на движение, той може да бъде оборудван с IR сензор. В същото време, когато някой се опита да докосне превключвателя, полето ще се премести надясно и наляво. За тези цели е подходящ сензорът GP2Y0A21, той има три проводника. Жълтото трябва да бъде свързано към третия щифт на Arduino, червено към щифт 5 и черно към земята.
Това е всичко, един прост и в същото време забавен робот е готов. Такава играчка ще донесе радост не само на детето, но и ще изненада много възрастни.
Firmware: