

Виброботите са такива роботикоито се движат поради вибрации. Въпреки факта, че дизайнът им е доста прост, те не са по-малко впечатляващи в работата си от технически по-сложните си братя. Такъв робот ще използва четината като двигател, това е вид на краката му.
Описаният в статията робот може независимо да променя траекторията на движение и сам по себе си заобикаля препятствия. Като експеримент авторът създава два робота, върху които са инсталирани различни източници на енергия и двигатели. По принцип няма строги стандарти по отношение на използваните материали, основното е да се придържате към дадената схема при сглобяването на робота.

Материали и инструменти за производство:
- найлонови връзки в размер 3х150мм;
- изолационна лента с черен цвят;
- 9 волтова батерия (6F22);
- лазерен диск (CD или DVD без разлика);
- защитен корпус;
- 9-волтов батериен конектор;
- ексцентричен (изтриване).

Производственият процес на робота:
Първа стъпка. Създайте основата на робота
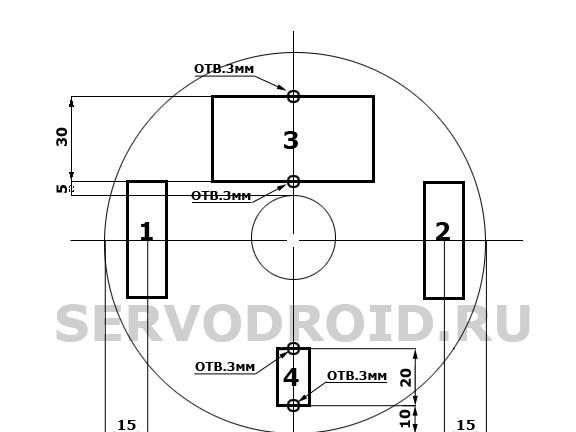
Като основа за робота ще се използва обикновен CD или DVD диск. Направете дупки в него ясно според схемата, която е представена на снимката. Без изключение всички отвори се пробиват с 3 мм свредло. Този диаметър е напълно достатъчен, когато се използва за закрепване на найлонови връзки. Ако решите да използвате различен метод на закрепване, тогава дупките могат да бъдат пробити до всякакъв друг размер. Предложеният чертеж е подходящ за всеки монтаж на робота.
Числата 1 и 2 обозначават местата на монтаж на четките, в квадратчето с числото 3 е монтирана батерия, а в квадрат 4 е монтиран двигател.
Стъпка втора Ние правим и монтираме хамали
Благодарение на задвижването роботът ще се движи. За да ги направите, трябва да вземете две четки за зъби. Най-добре е четките да са еднакви по височина и форма на четина. Ако формата е различна, може да се коригира с ножица.
Сега четините трябва да зададат посоката. За това се взема лепяща лента и четините се увиват по същия начин, както е посочено на снимката. В това положение четката трябва да се държи за около час, така че четините да запомнят това положение. На снимката сивата стрелка показва посоката, в която са наклонени четините.

След задаване на желаната форма е необходимо да отрежете частта с четините от четката за зъби. След това трябва да вземете пистолета за лепило и да инсталирате четинките на диска на посочените места. Цялата работа трябва да се извърши бързо и точно, тъй като горещото лепило се охлажда бързо и се втвърдява.Трябва да опитате да инсталирате четките, така че да стоят успоредно една на друга.
Четините на четките трябва да са насочени назад, с други думи, към батерията при 9 волта. По време на работа роботът ще се движи срещу посоката на четините, тоест мястото на батерията ще бъде отзад на робота.

1 - диск, 2 - горещо лепило, 3 - отвори за инсталиране на двигателя, 4 - отвори за инсталиране на батерията. Белите стрелки показват посоката на четините.
Стъпка трета Да направим ексцентрик
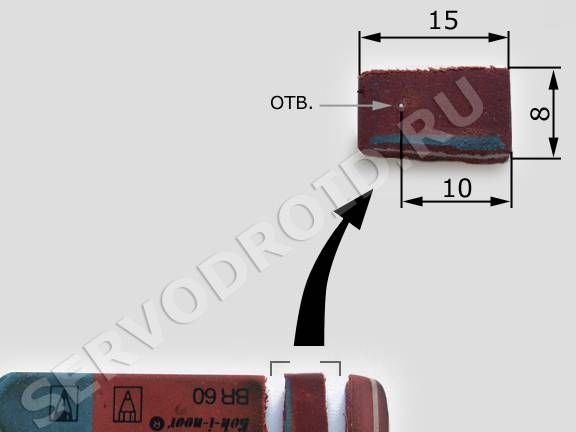
За да получите вибрация, върху вала на двигателя трябва да се постави ексцентрик, т.е. небалансиран предмет. Авторът направи ексцентрик на гумата, като отряза парче подходящ размер. Направете дупка на мястото, обозначено с бялата стрелка. Той не трябва да е голям, тъй като ексцентрикът ще се плъзне от вала на двигателя. Може да се направи с игла.
Стъпка четвърта Изработка на защитно покритие.
Тъй като вибрацията се създава от въртящия се ластик, за да може роботът да работи, препоръчително е да защитите това място от различни предмети. В допълнение, такава защита ще даде на робота по-интересен външен вид. Защитният капак е направен от хартия, която се състои от няколко слоя. Трябва да направите цилиндър от хартия, неговият размер зависи от размера на двигателя. За да придадете повече твърдост на хартията, тя може да бъде намазана с лепило и по този начин да поставите още няколко слоя. Или можете да използвате картон за тези цели.
За да създадете цилиндрична форма, моторът просто е обвит с хартия отгоре.




Стъпка пета Окончателно сглобяване на робота
Двигателят се инсталира на определено място и след това се фиксира с найлонова замазка. Такива замазки могат да бъдат закупени в магазини, специализирани в продажбата на строителни материали.
Батерията също е точно прикрепена. Важно е да се има предвид, че батерията трябва да е ясно центрирана, в противен случай траекторията на робота може да се промени. Между другото, по този начин в бъдеще е възможно да се зададе траекторията на движението домашно.


Сега между клип-съединителя и мотора трябва да инсталирате малък превключвател. В заключение остава да свържете клип-конектора към батерията и можете да започнете да тествате робота. Проводниците са свързани по цвят.
Въпреки това, когато използвате батерия Kron, не е необходимо да инсталирате превключвател, можете да включите робота, като свържете конектора.
Е, за втората версия на робота можете просто да извадите батерията от устройството, но разбира се превключвателят е по-обещаващ.
Това е всичко, роботът е готов, можете да започнете да тествате. За да постигнете желания резултат, можете да опитате да промените полярността, така че моторът ще се върти в обратна посока, а роботът ще се държи по различен начин.