
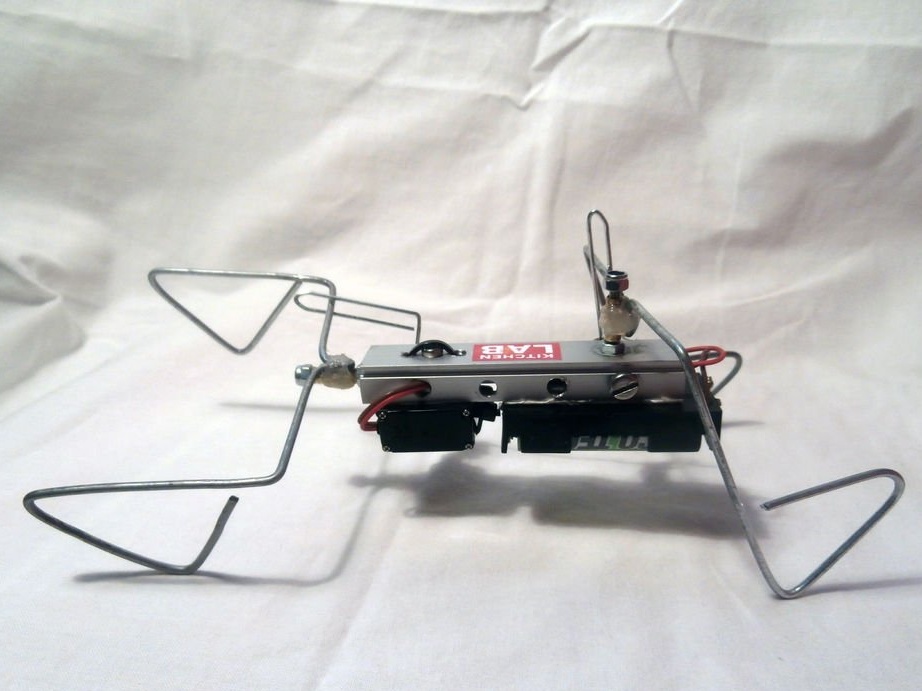
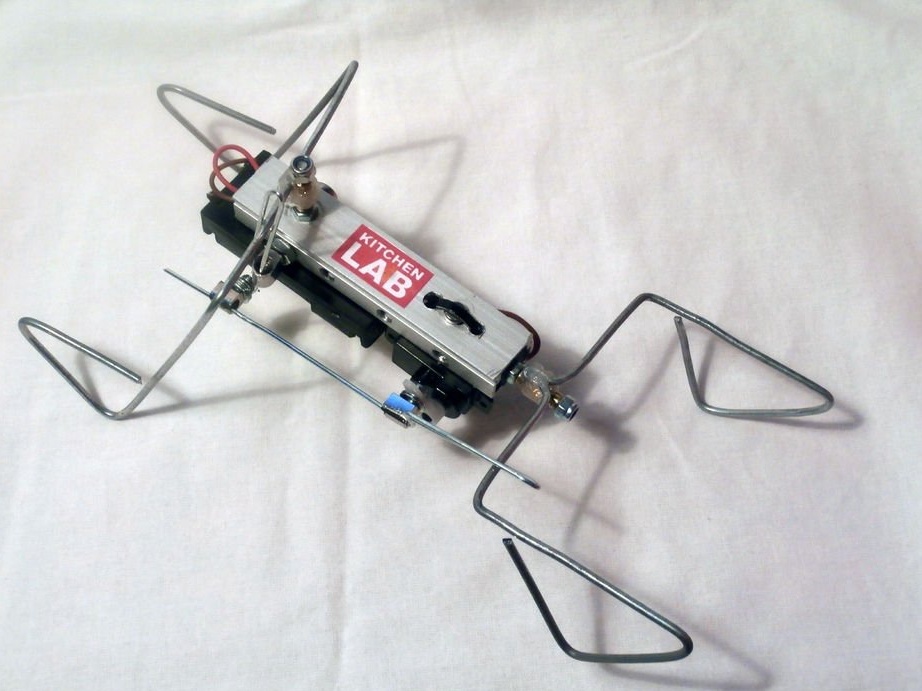
Здравейте на всички! Бях вдъхновен да създам моя BEAM-робот, като видях достатъчно такива едномоторни и двумоторни чудеса на роботиката в Интернет. Идеята беше да се създаде ходещ робот, който стъпва по същия начин като 1 или 2 моторни BEAM проходилки. След няколко неуспешни експеримента направих това, което исках!
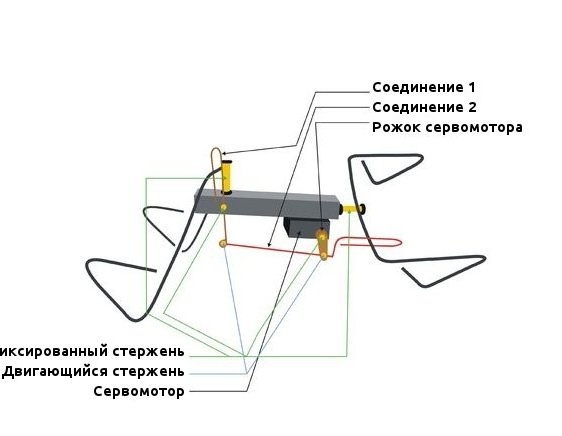
Стъпка 1: Механизмът
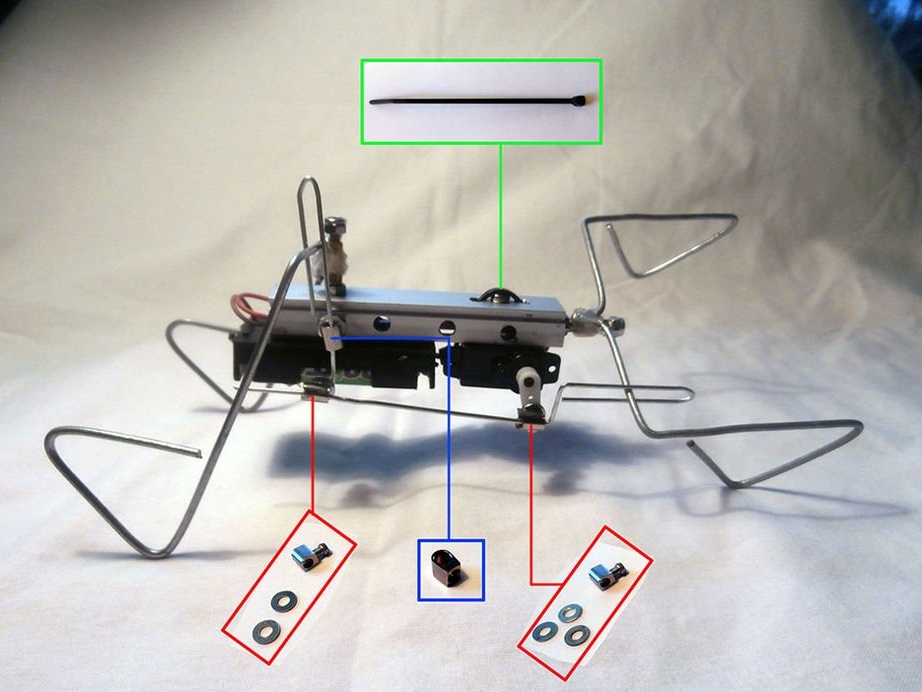
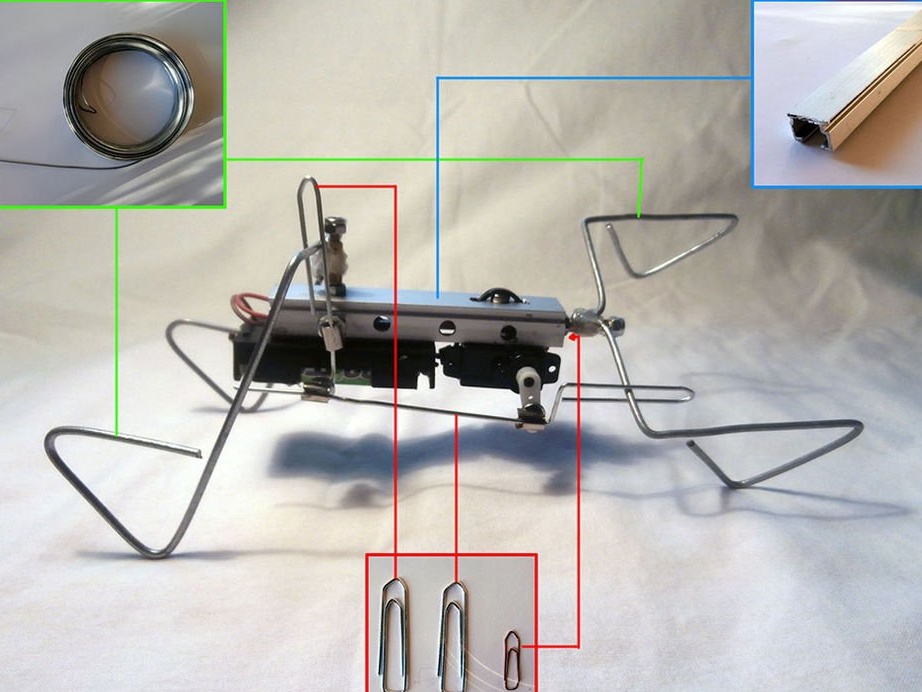
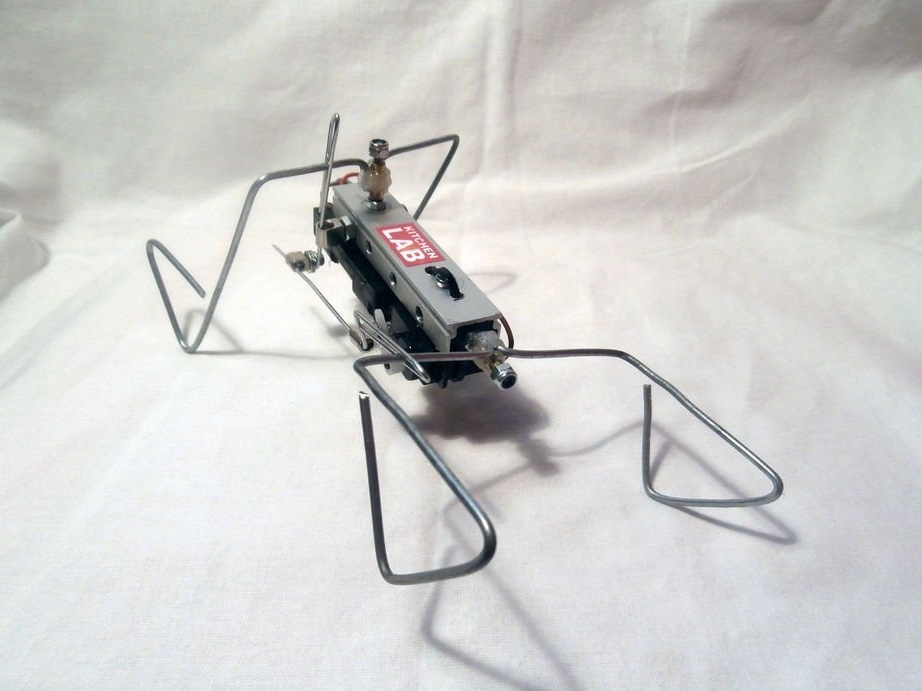
Стъпка 2: Необходими части

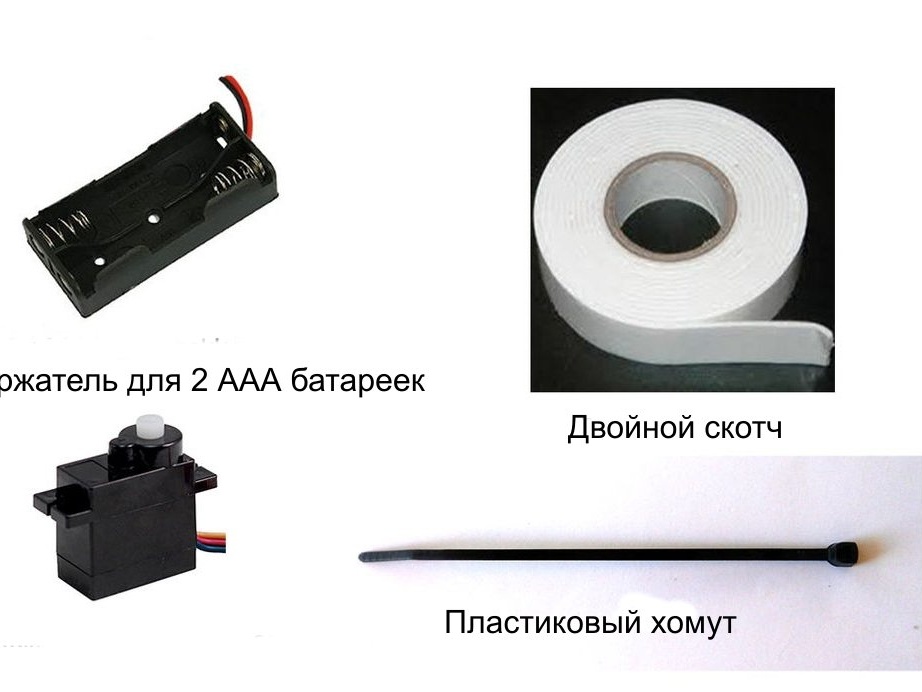



(1x) серво за непрекъснато въртене
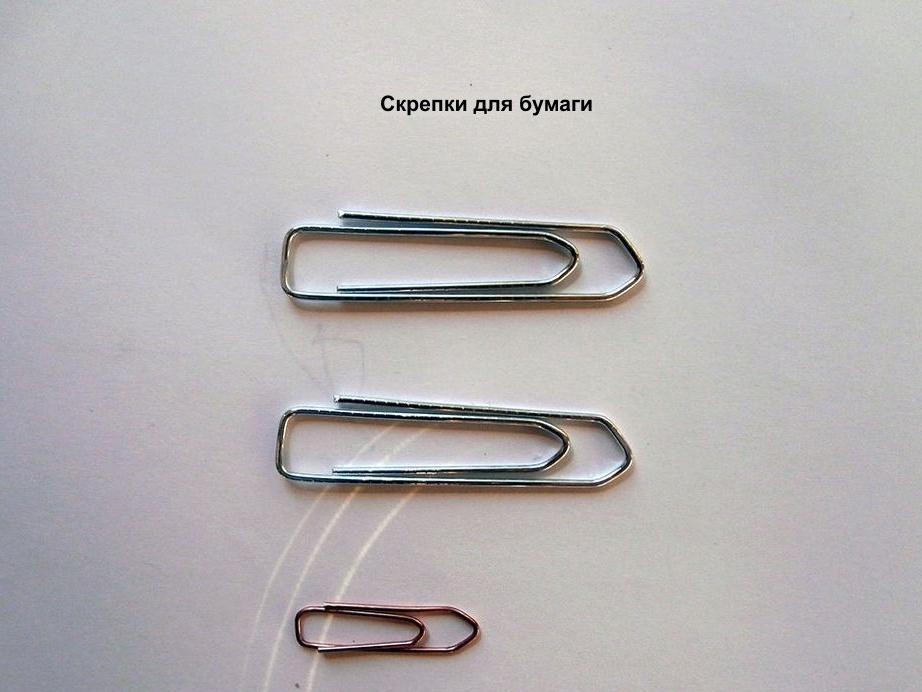
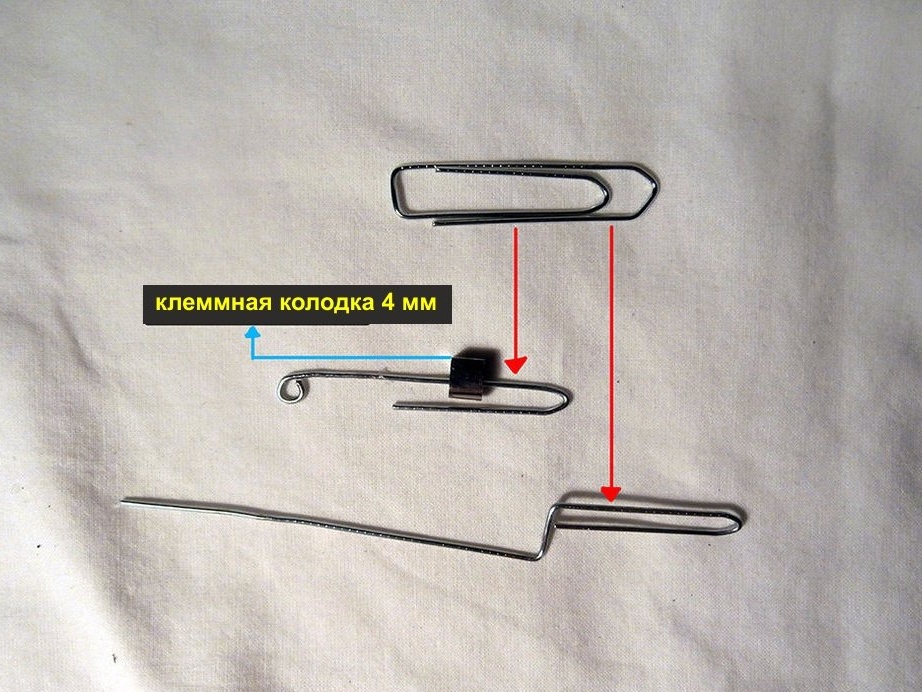
(2x) големи щипки за хартия
(1x) малка щипка за хартия
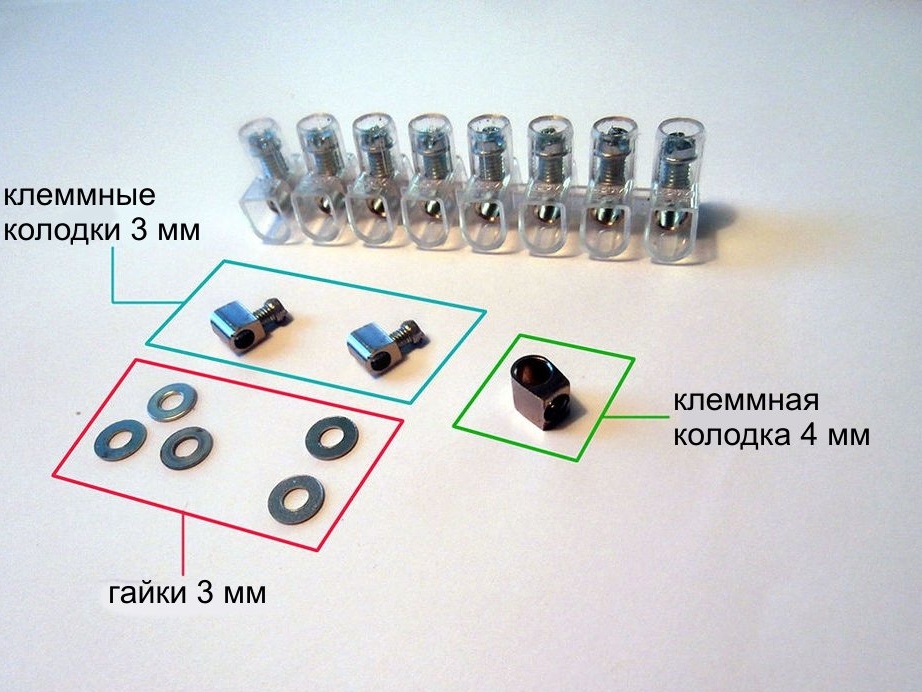
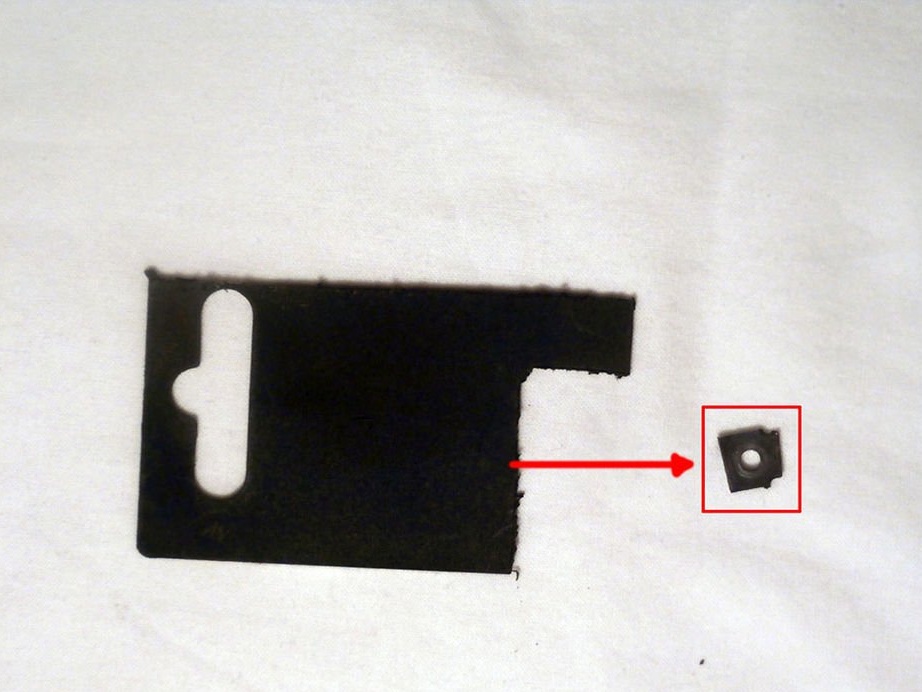
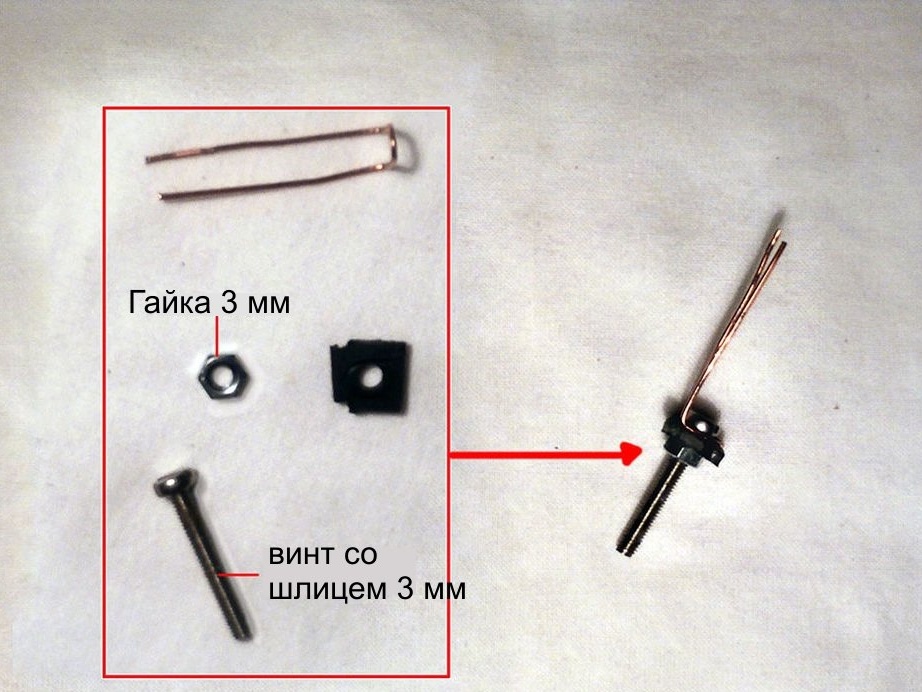
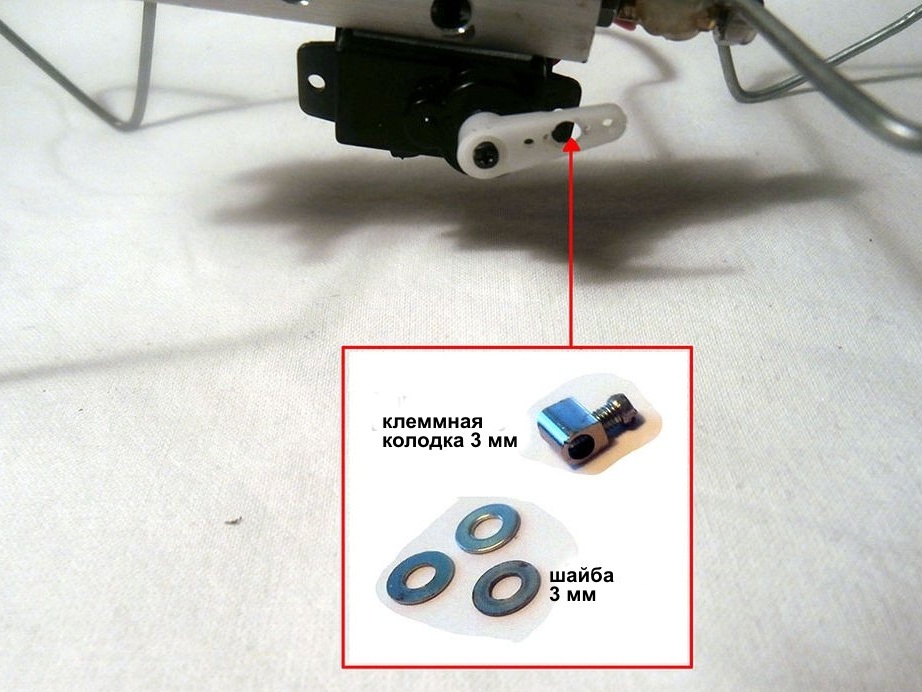
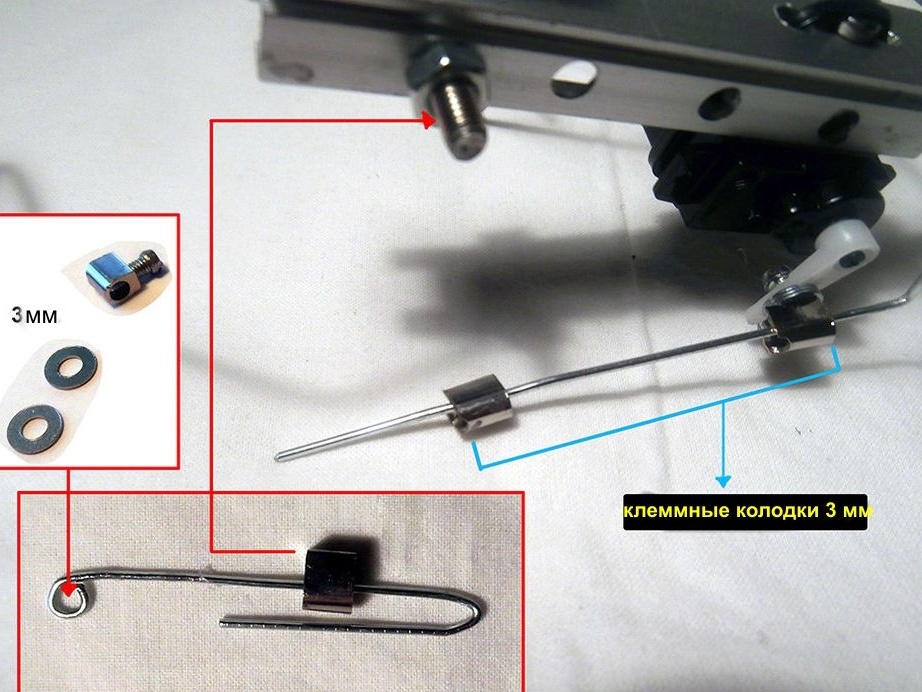
(2x) клемни блокове (3 мм)
(1x) клемни блокове (4 мм)
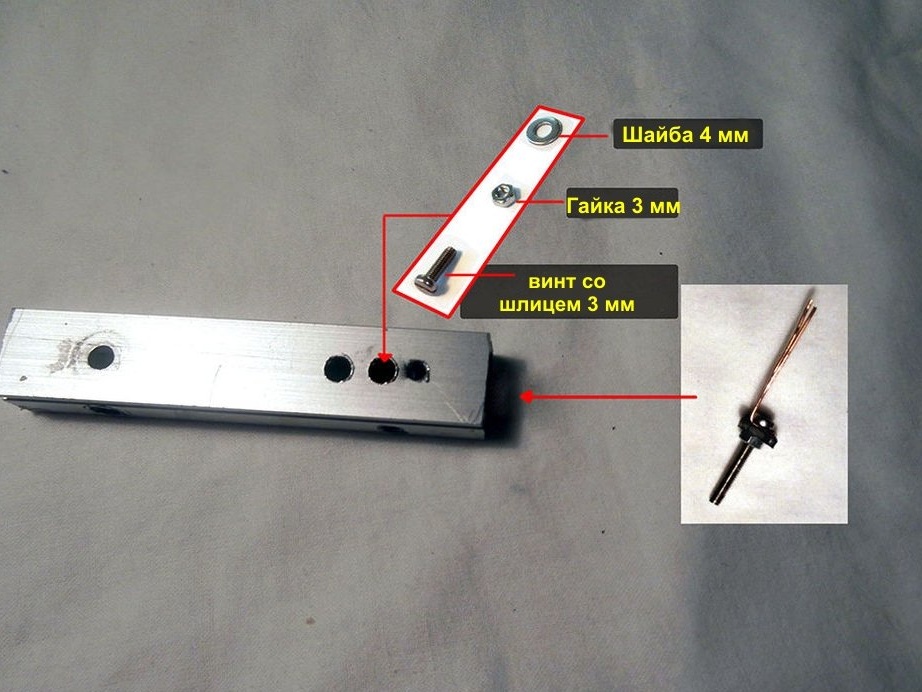
(1X) Използван блок от алуминиев профил
(1X) парче пластмаса
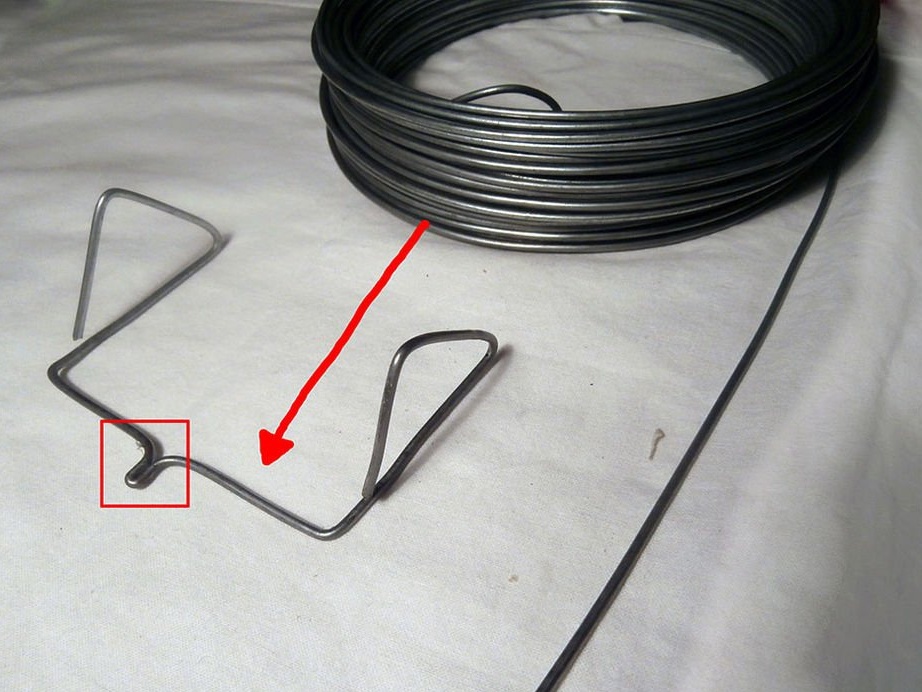
Стоманена тел (2 мм)
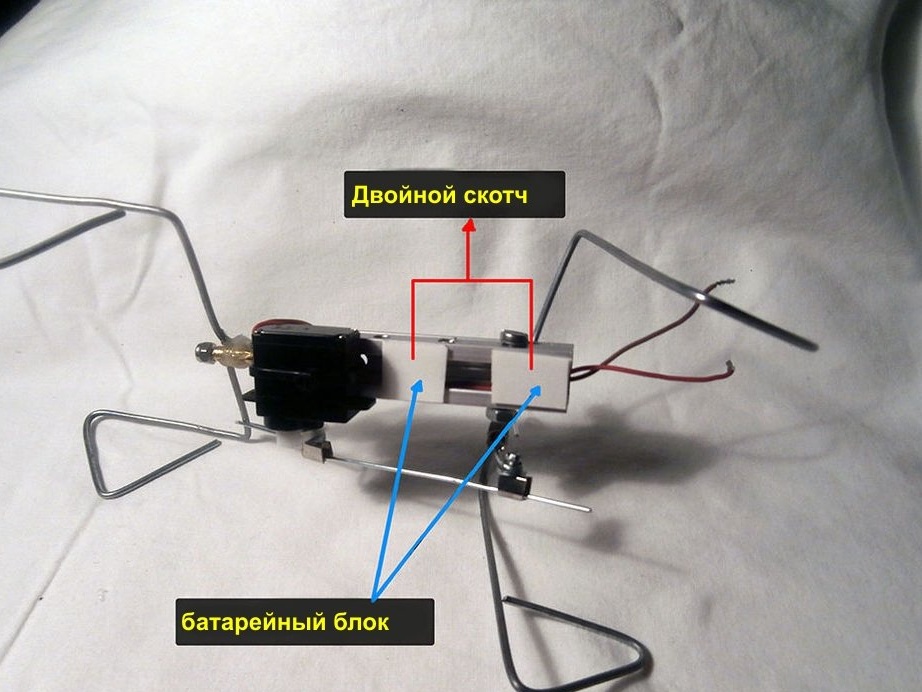
Двойна лепяща лента
Месингова тръба
(1X) малка скоба
(1X) батерия (2 x AAA)
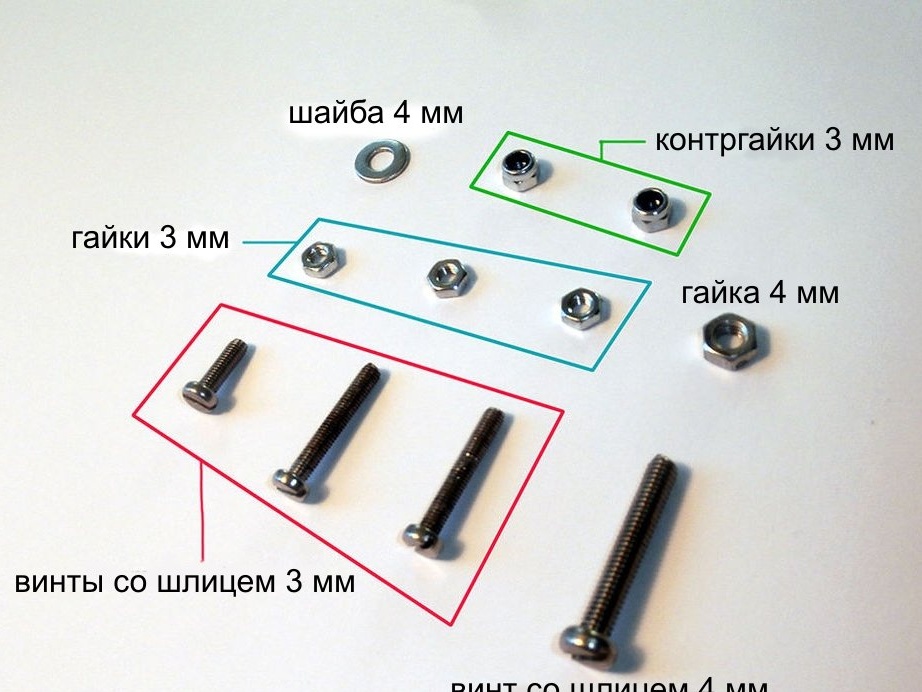
(2X) фиксатори (3 мм)
(3X) гайки и винтове (3 mm)
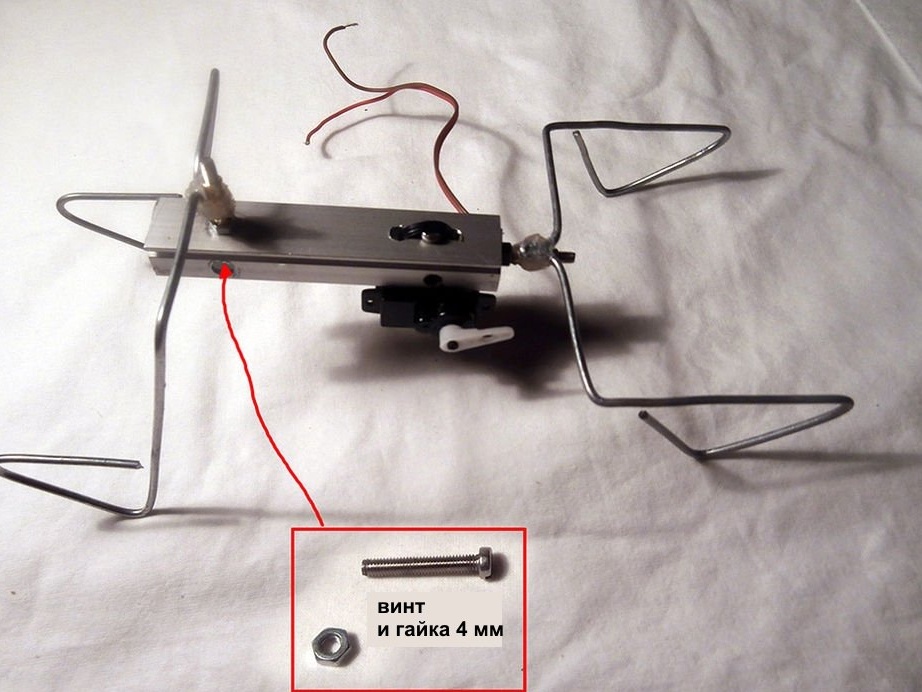
(1x) гайки и винтове (4 мм)
(5x) шайба (3mm)
(1X) шайба (4 мм)
Стъпка 3: Сглобяване на части
Стъпка 4: Инструменти
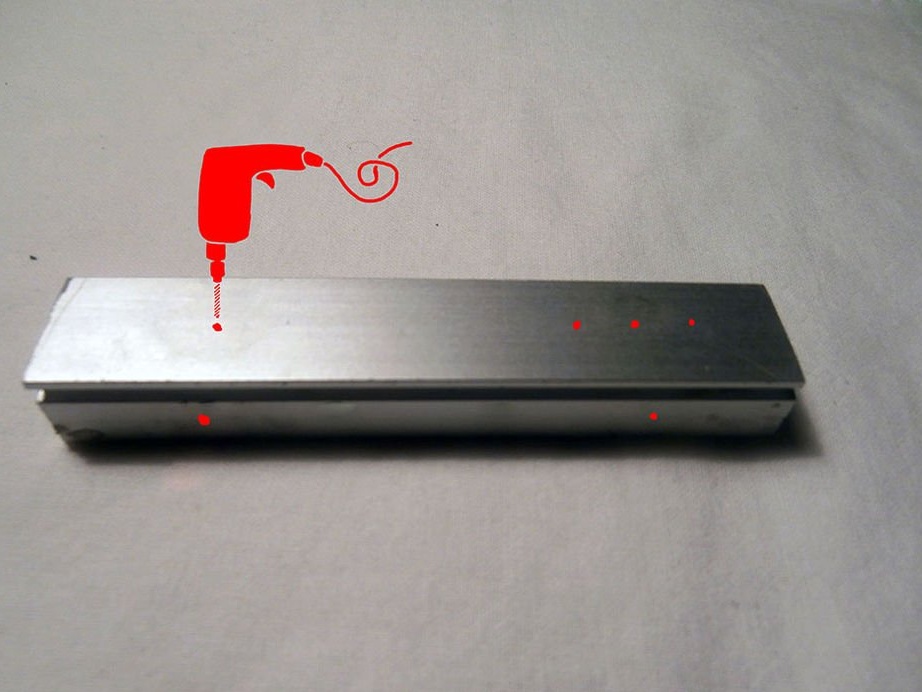
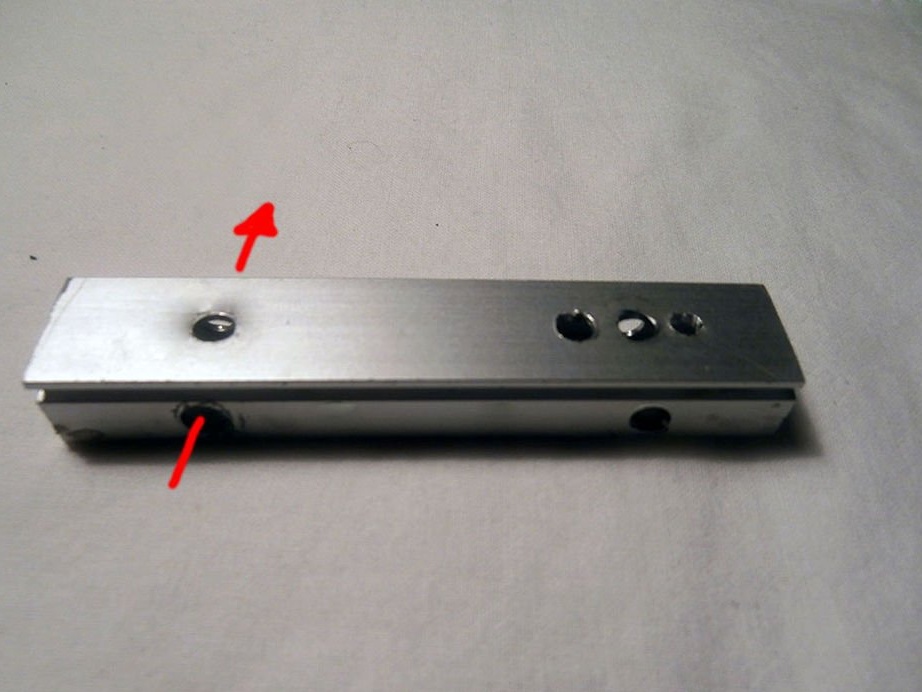
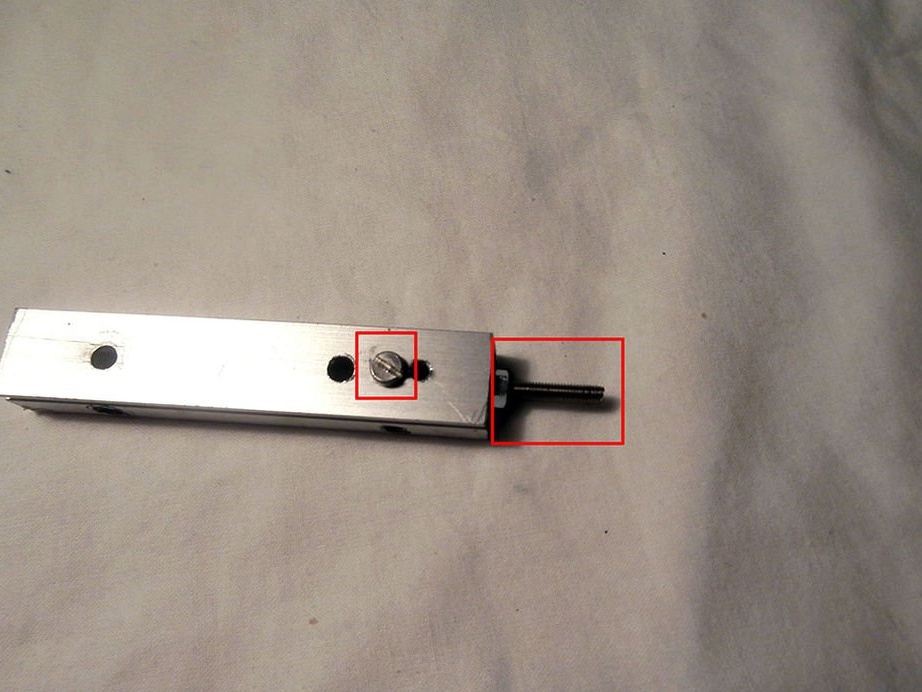
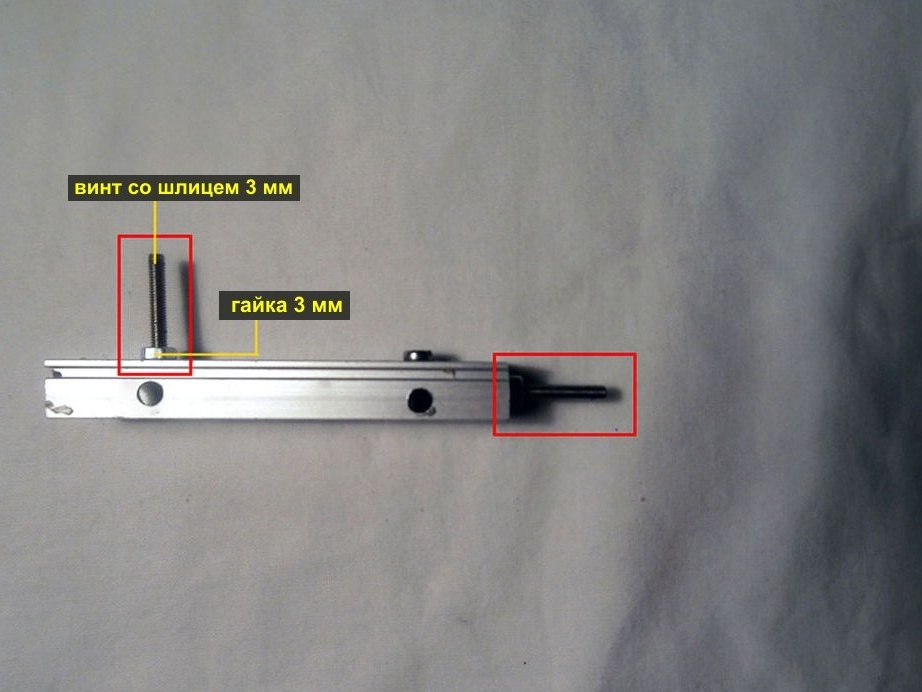
Стъпка 5: Корпус

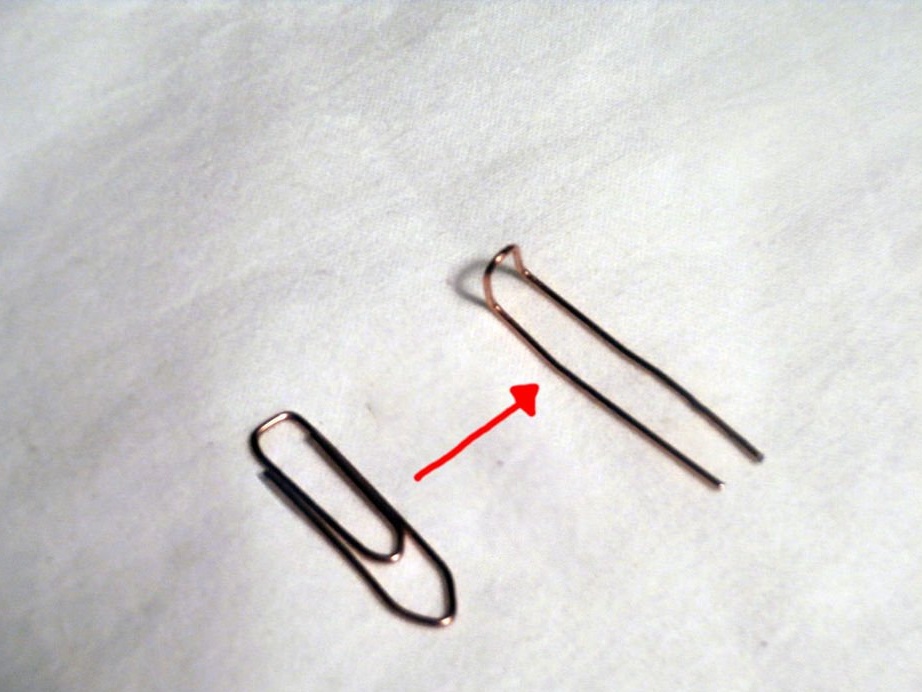

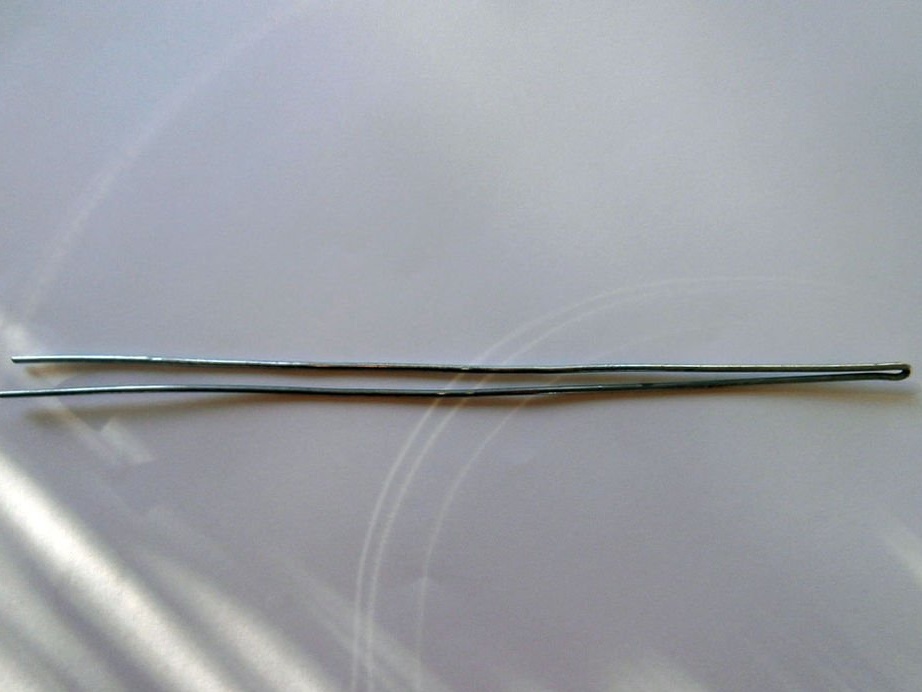
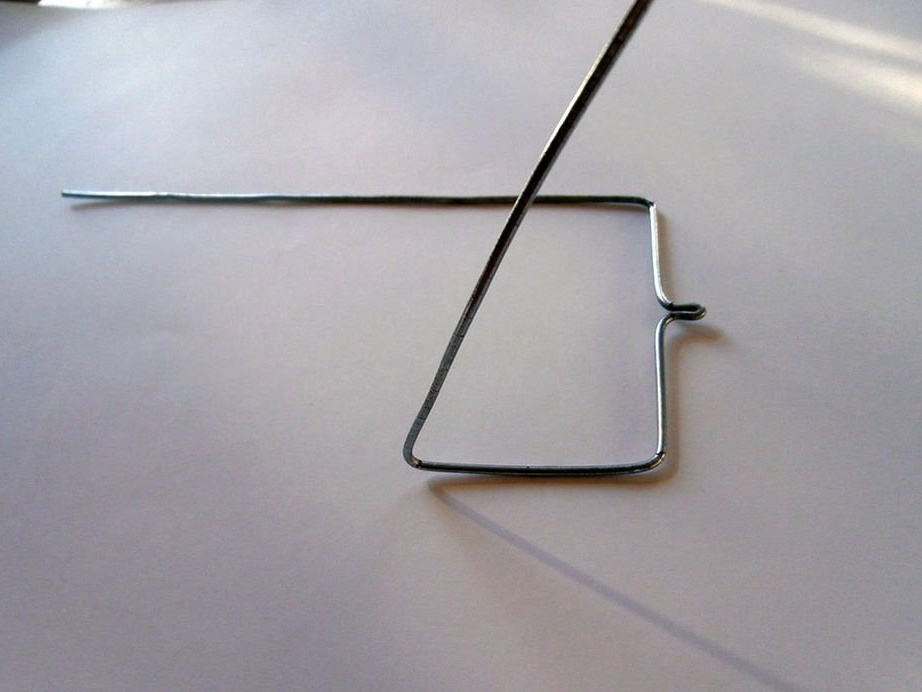
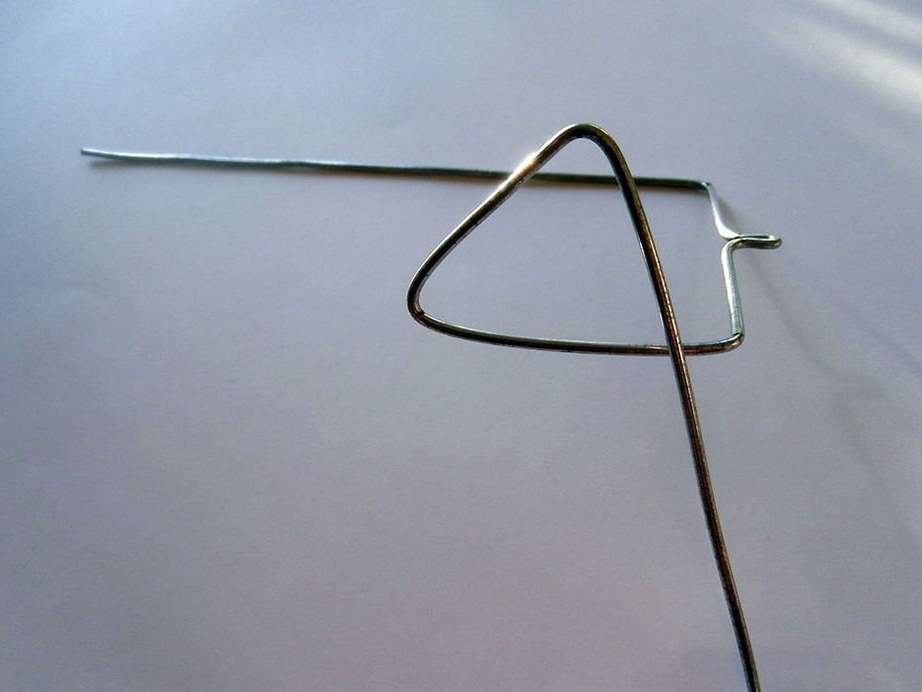
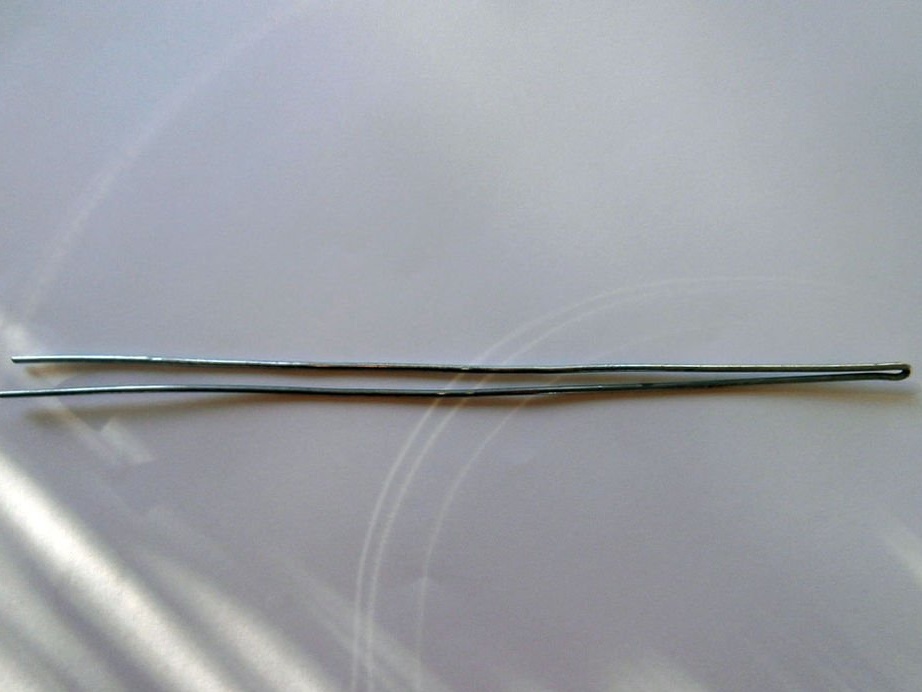
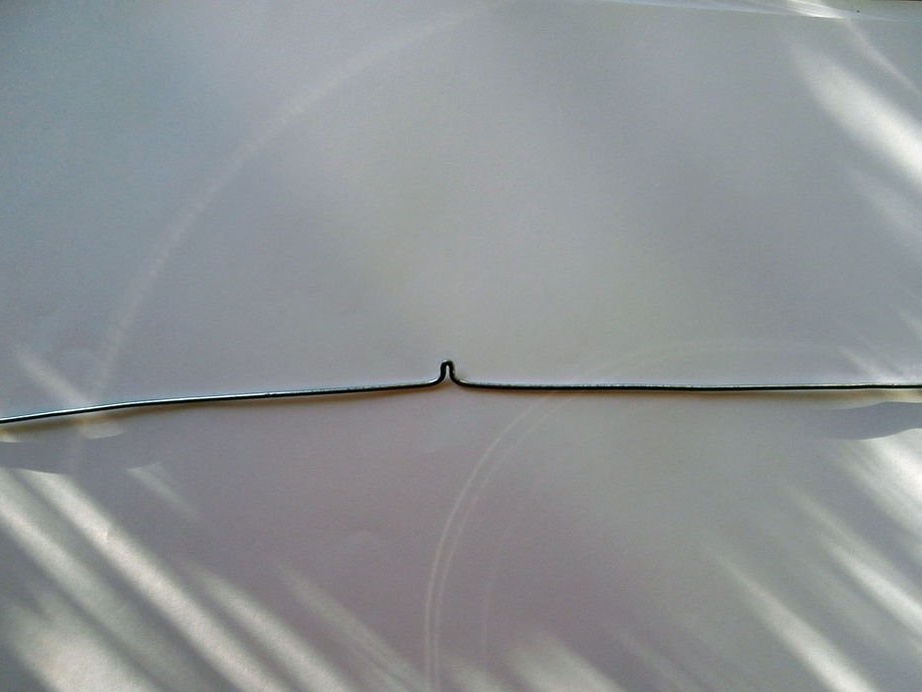
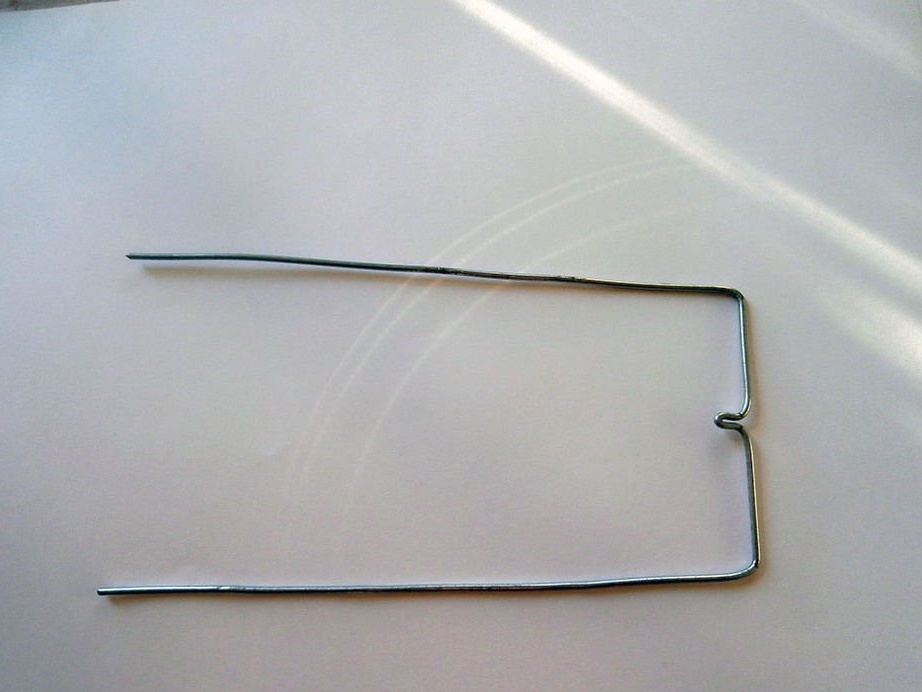
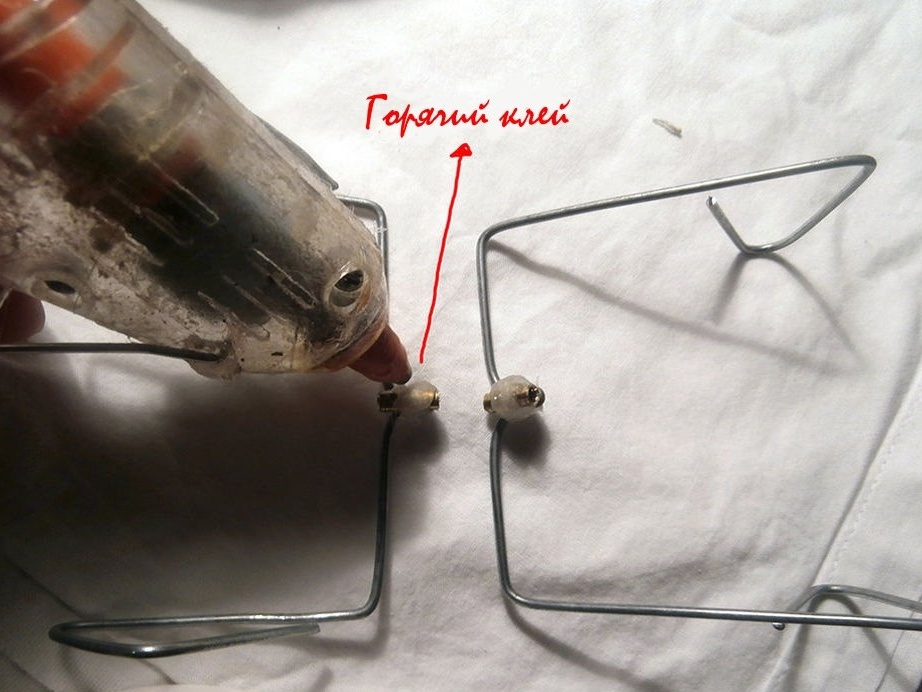
Стъпка 6: предни крака
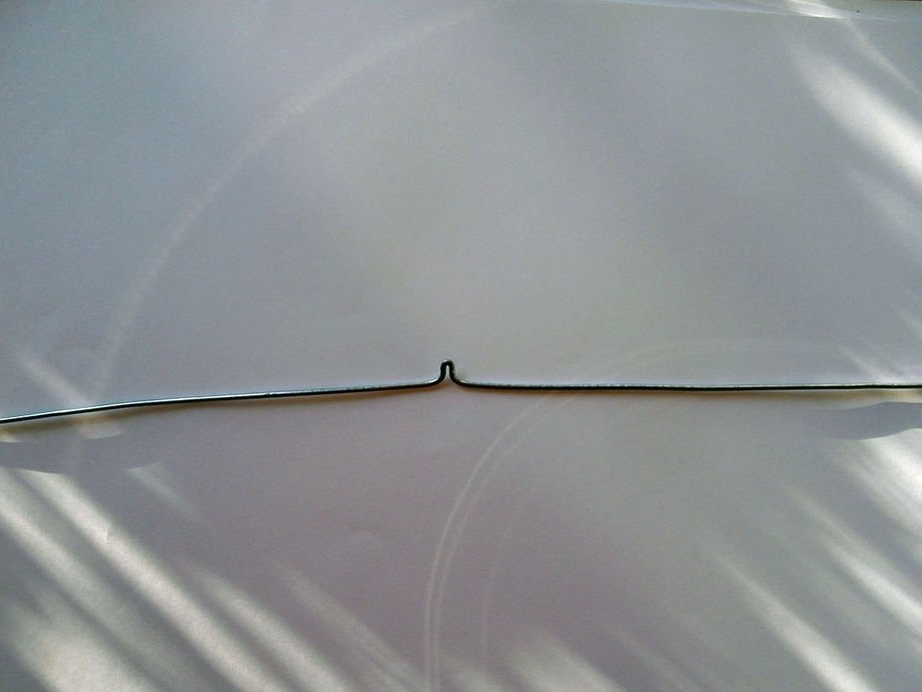
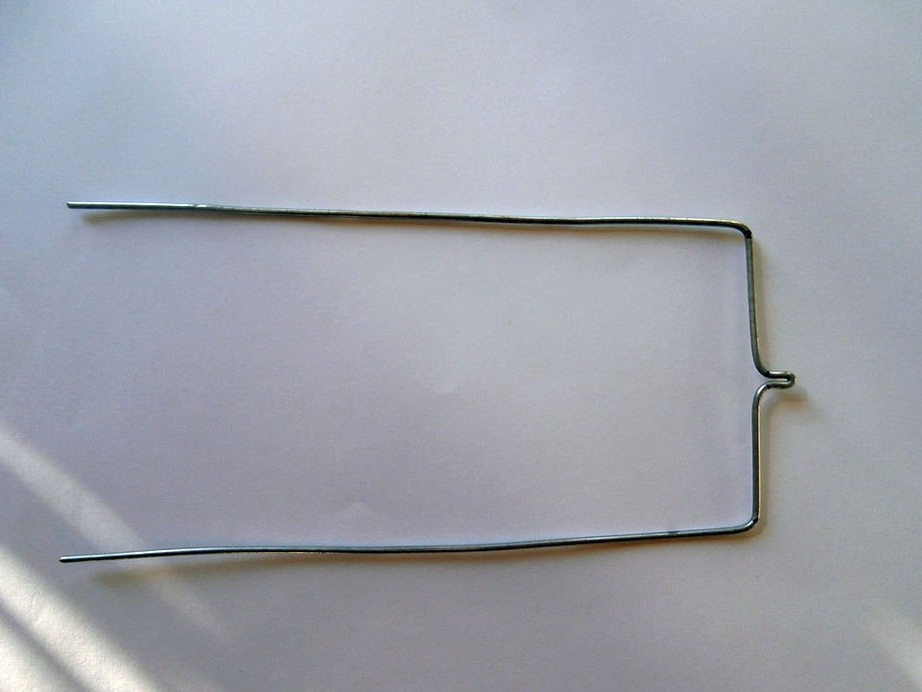
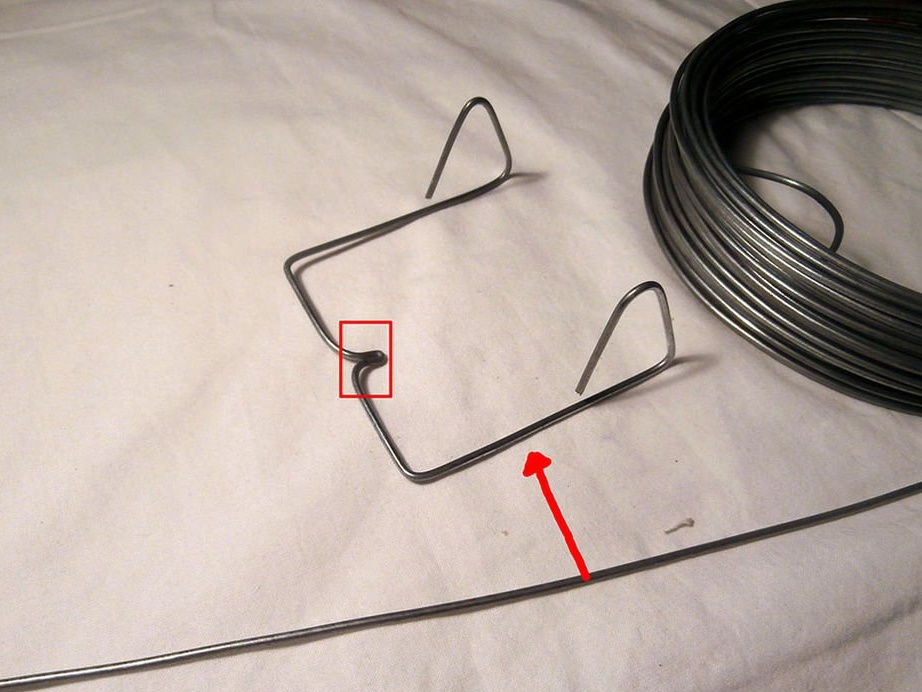
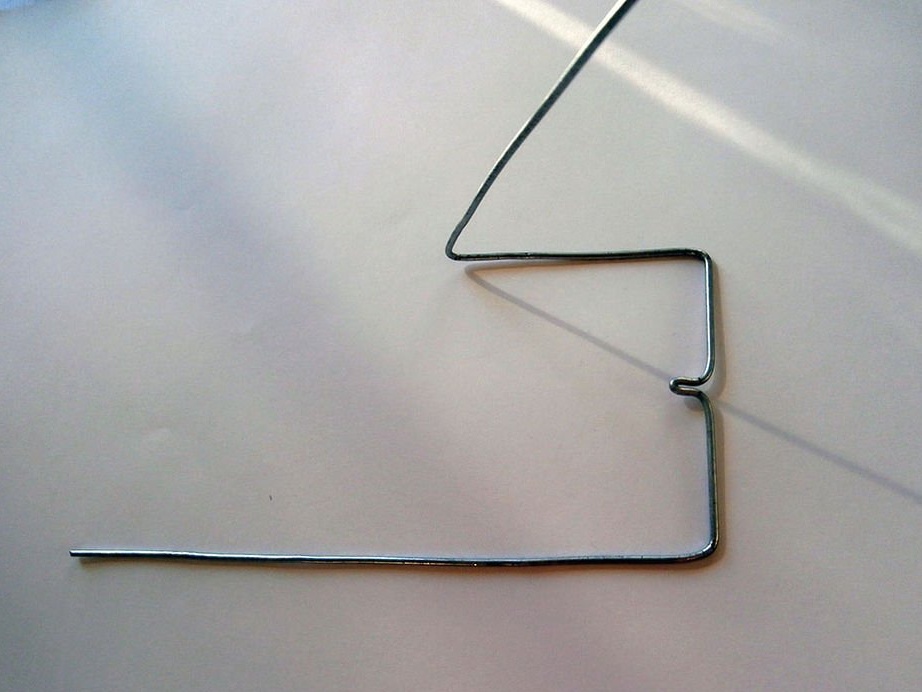
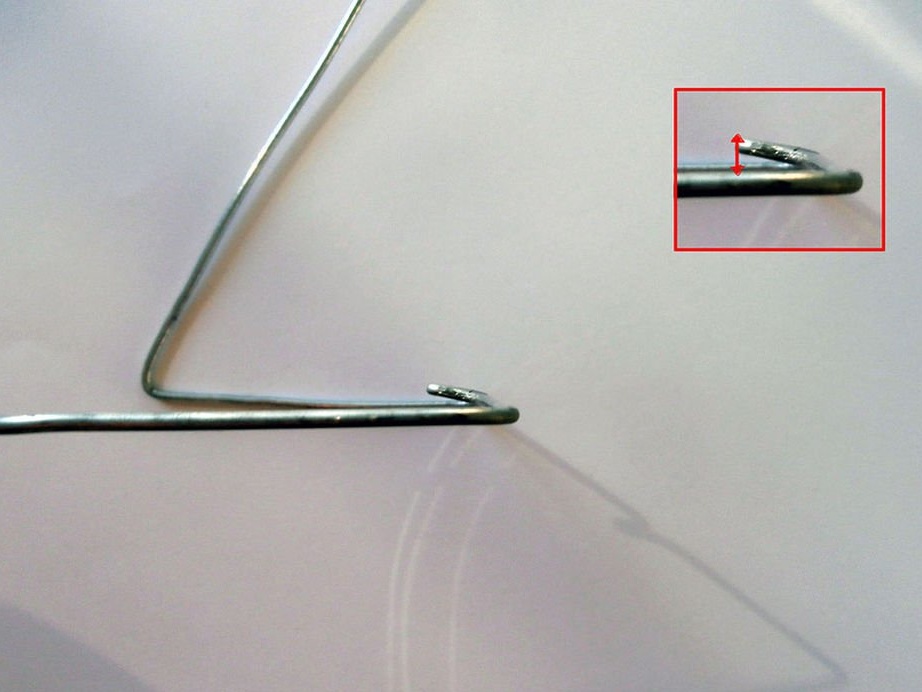
Стъпка 7: Задни крака
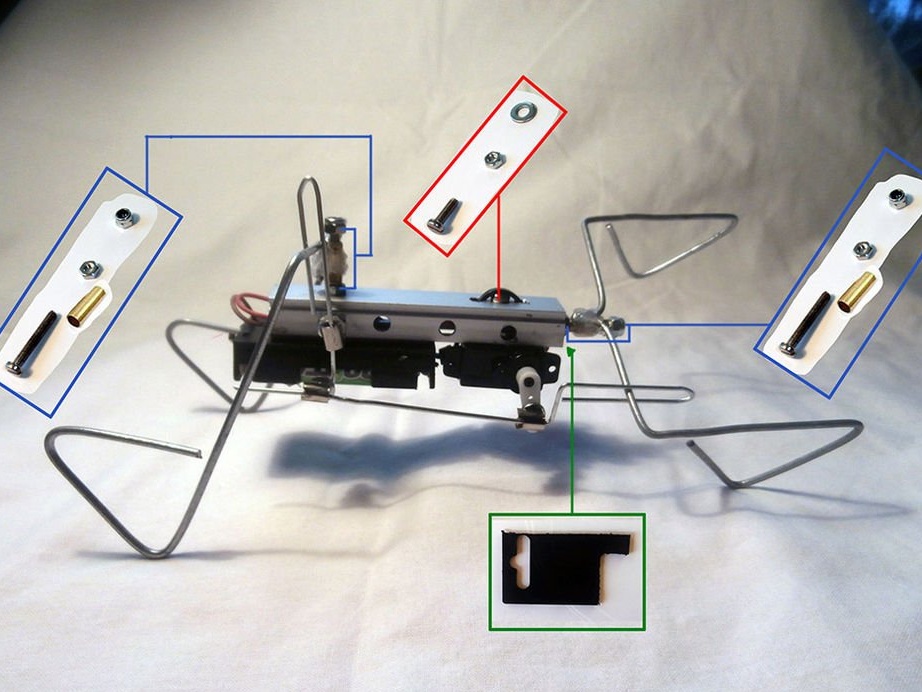
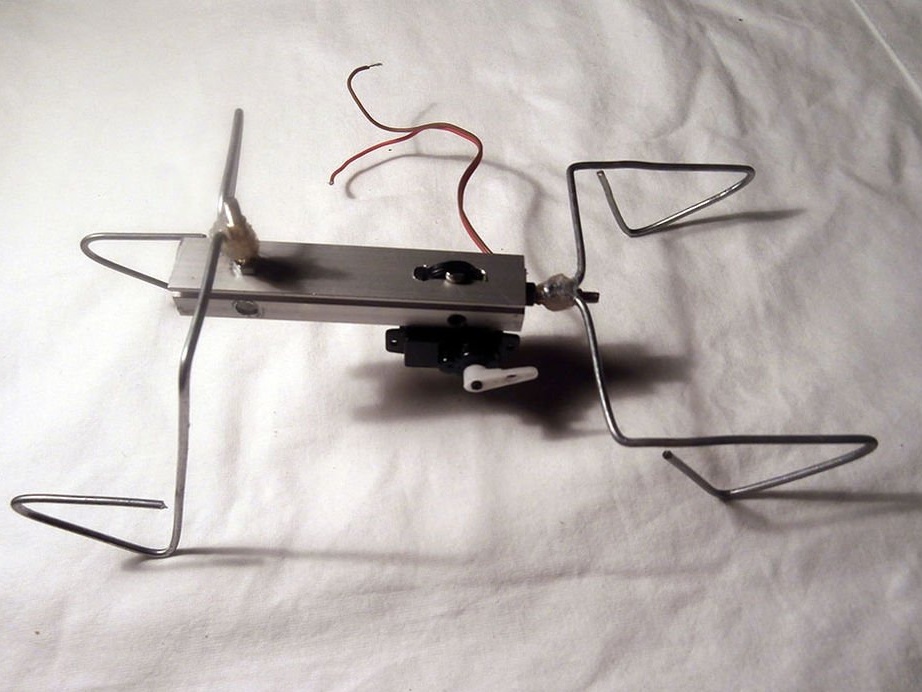
Стъпка 8: Закрепване на краката
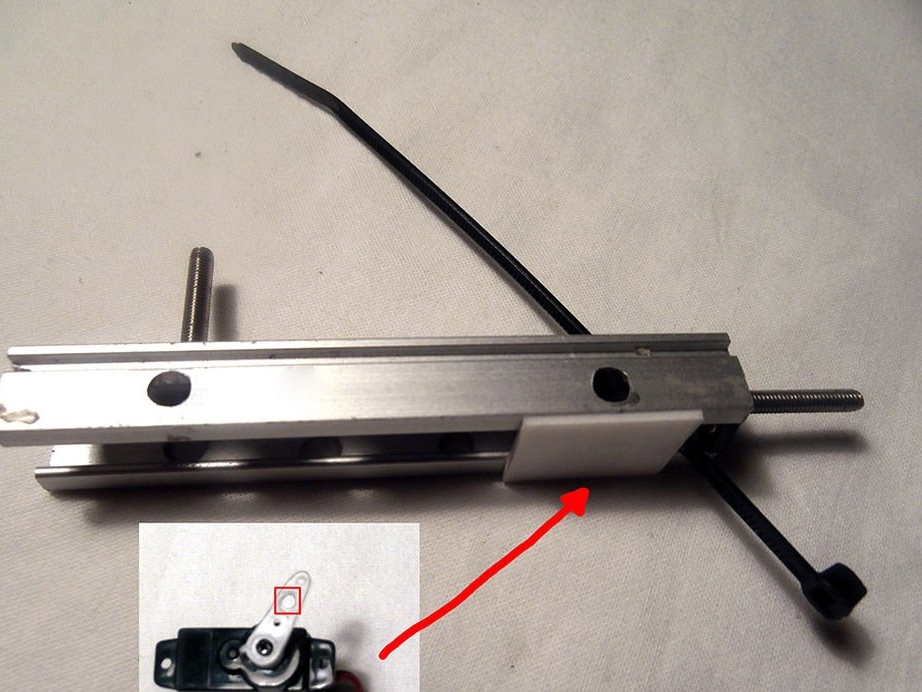
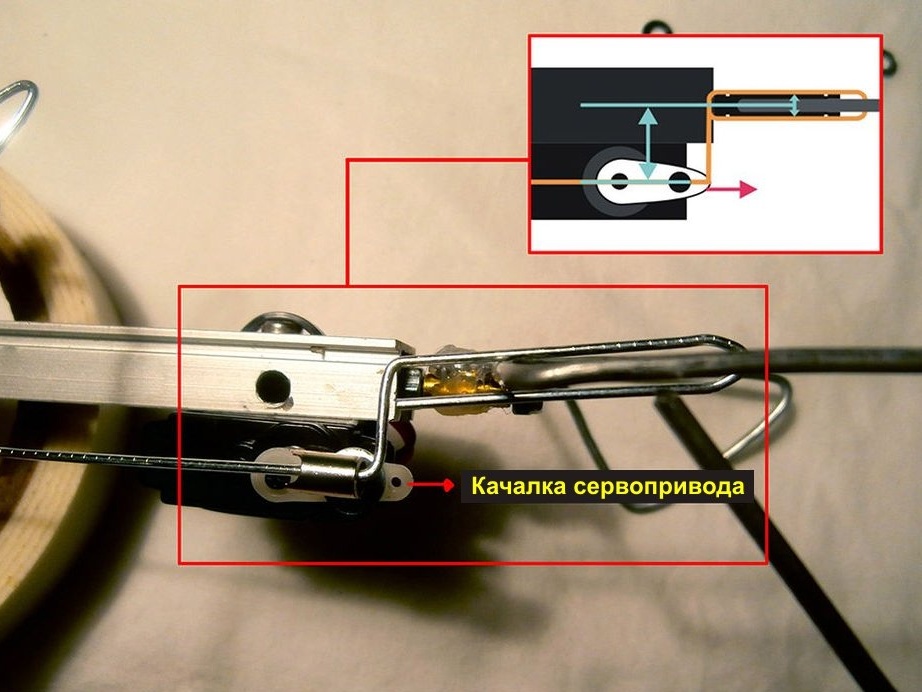
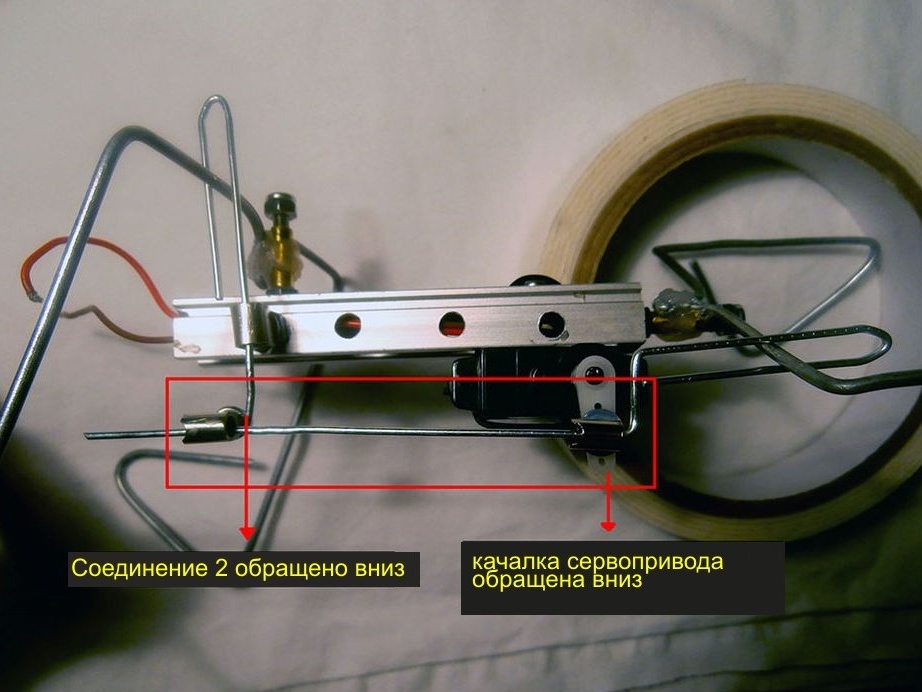
Стъпка 9: Съединител
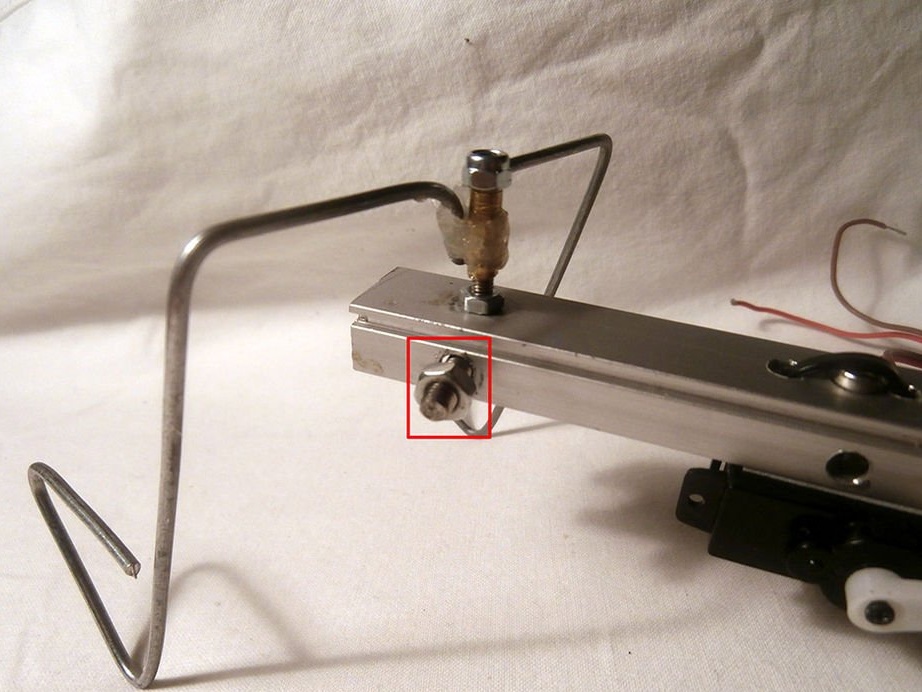
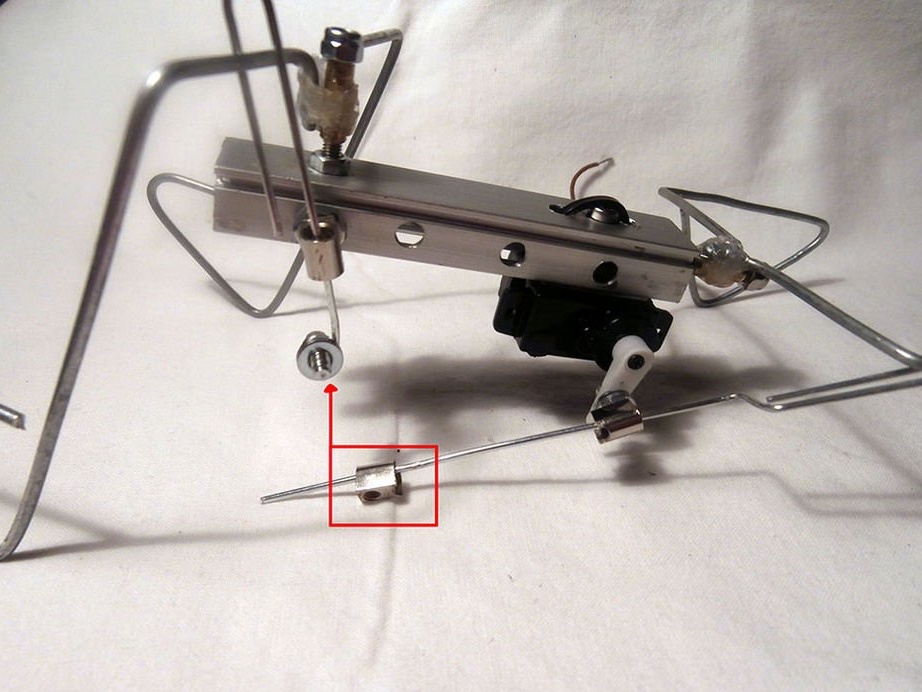
Стъпка 10: Монтаж на съединителя
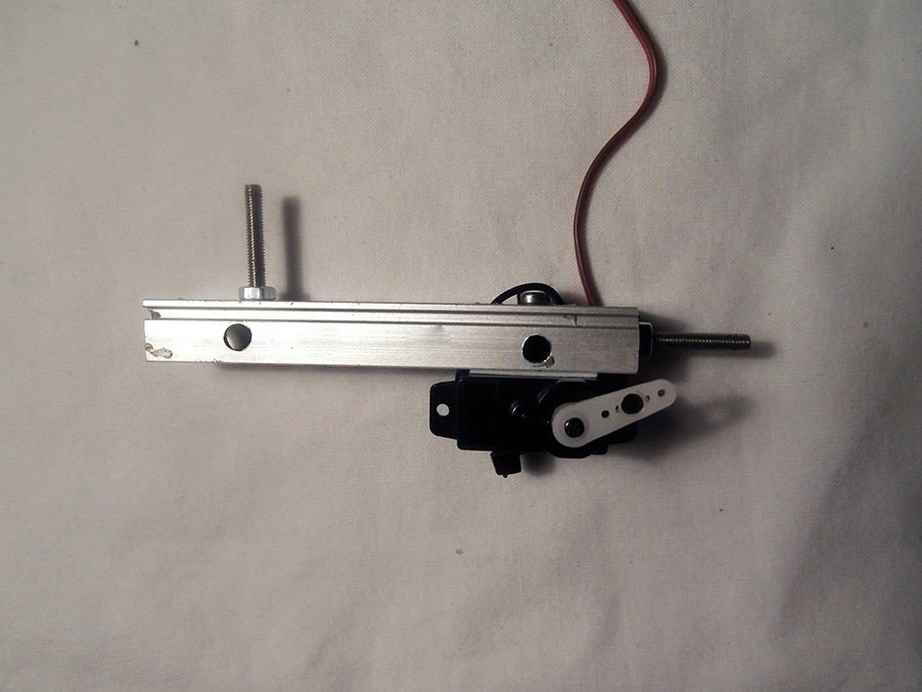
Стъпка 11: последните щрихи
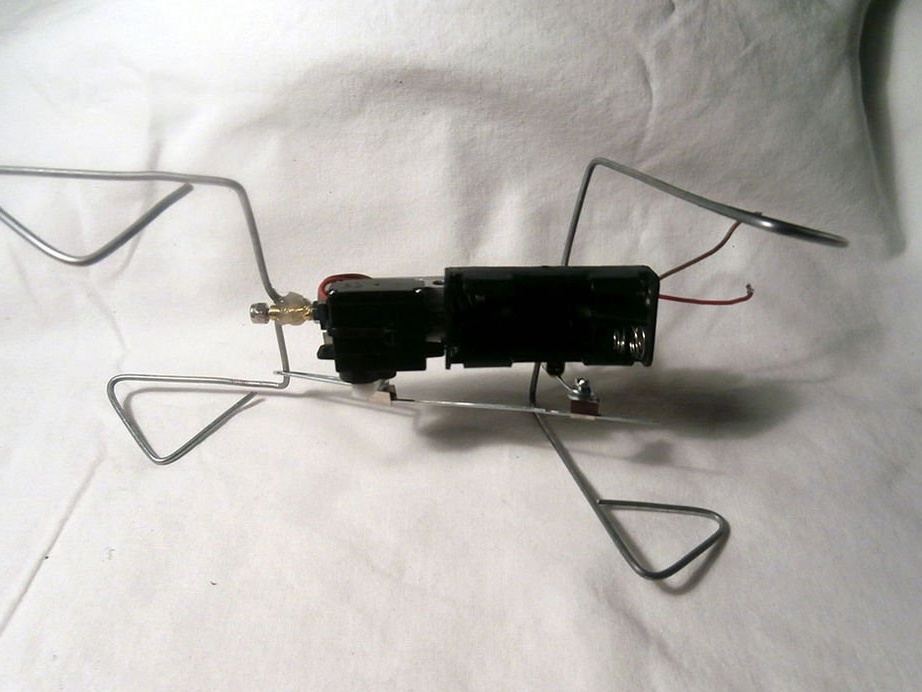
В крайна сметка просто свържете сервото и батериите и роботът Бухалът ще започне пътешествие около дома ви :)