




Този резервоар не е първият монтаж на капитана. Отличителна черта на този конкретен модел е пружинно окачване, оборудващо модела с двигател, поддръжка.
Нека да гледаме демонстрация.
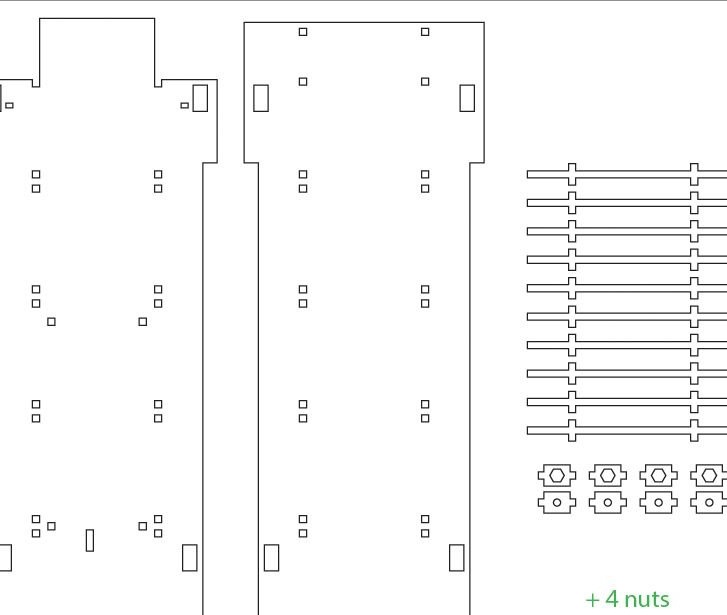
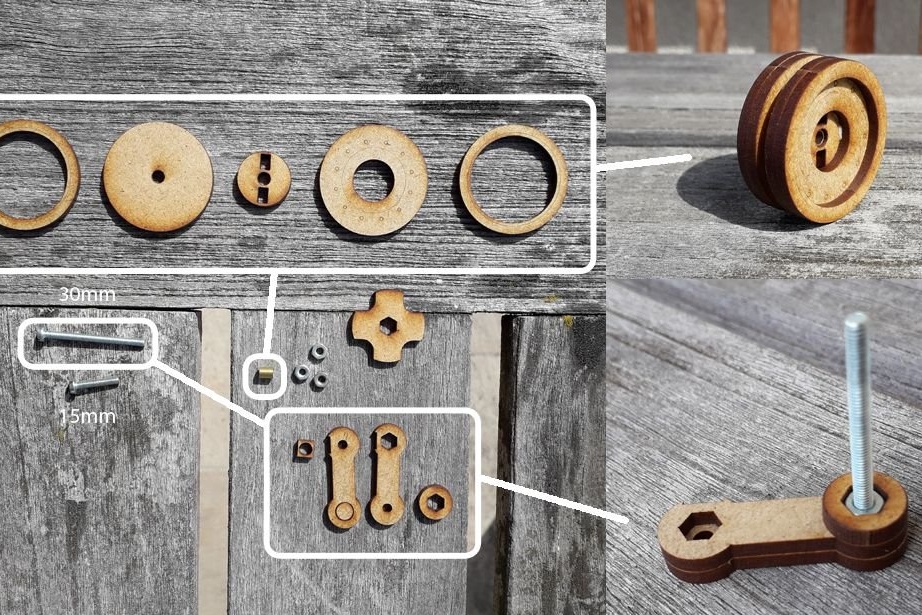
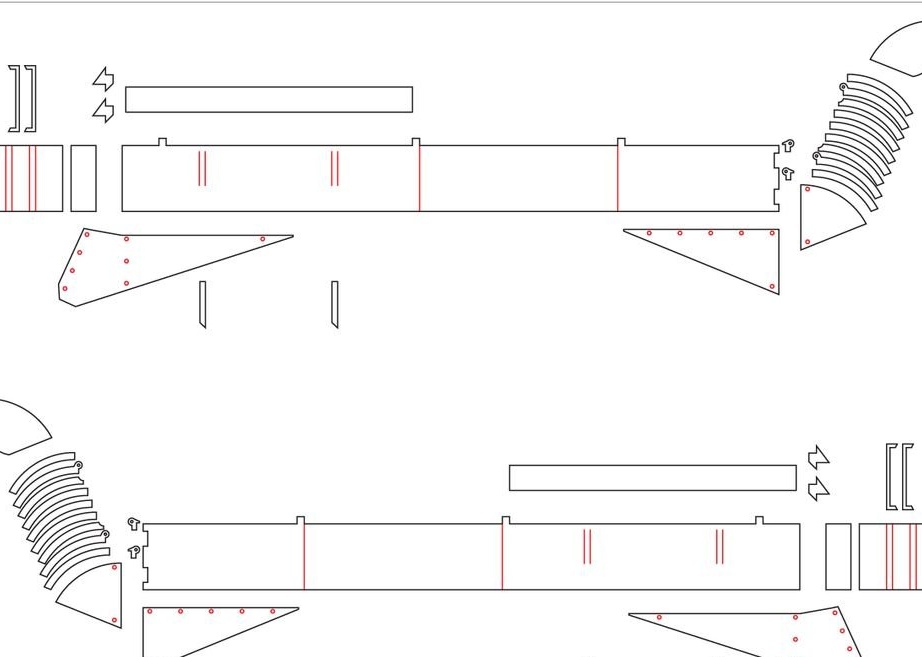
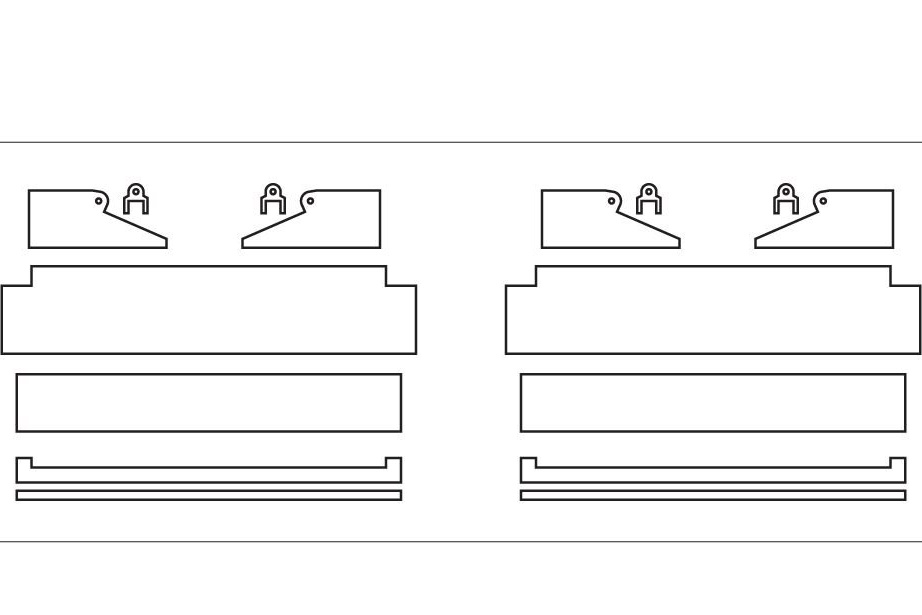
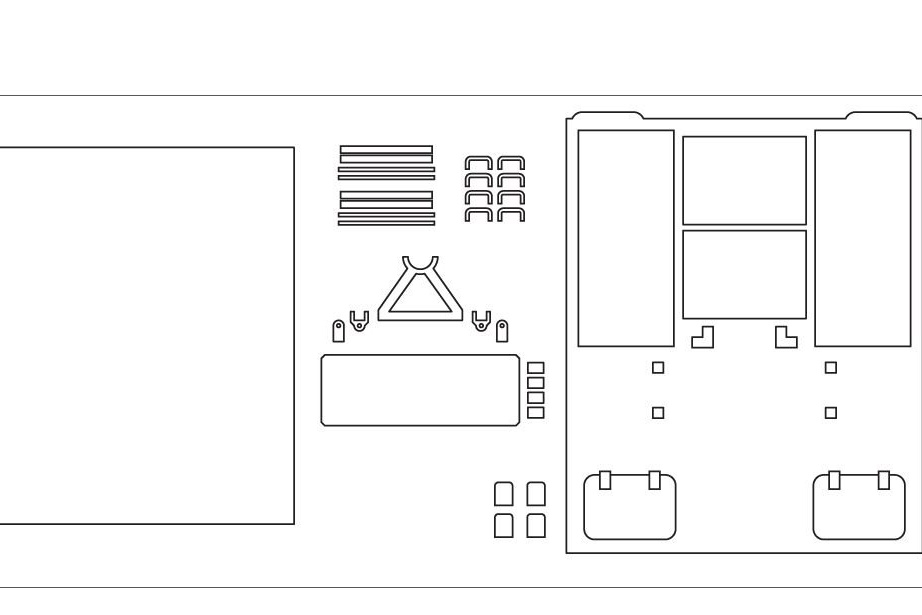
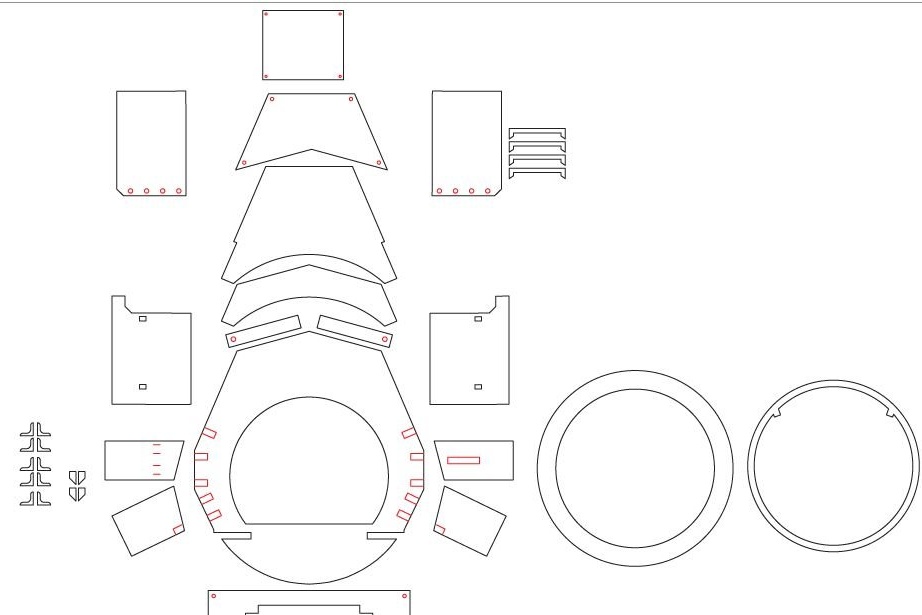
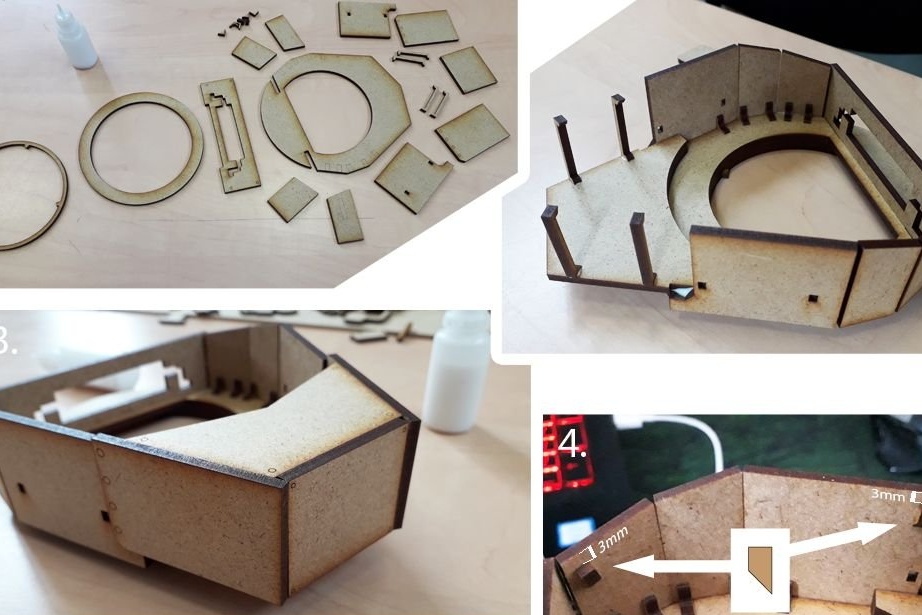
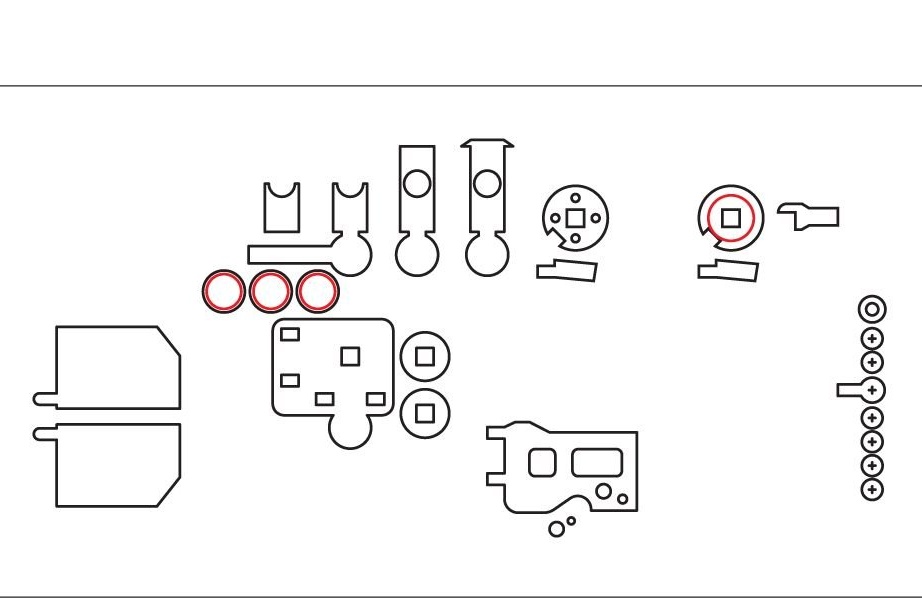
Детайлите на калъфа са изрязани с лазерен резач, а файловете са достъпни на тази връзка.
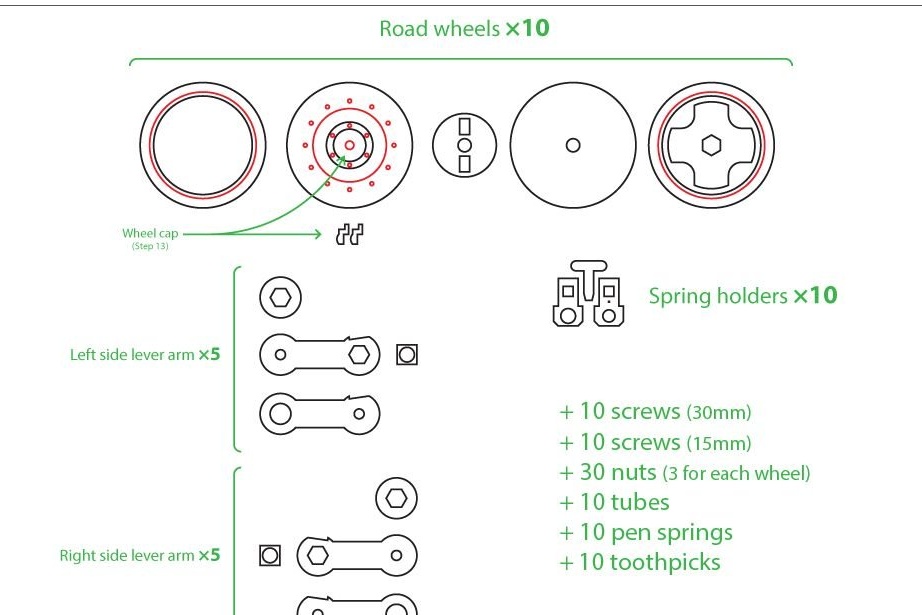
Освен части от тялото, ще са необходими и следните
Инструменти и материали:
- Винтове Ø 3 мм:
-14 бр дължина 15 мм,
-10 бр дължина 25 мм,
-10 бр дължина 30 мм.
-Тръби x20 Ø4 mm (вътрешен диаметър Ø3 mm);
-Метална жица Ø 1 мм;
-Ø3 мм резбова пръчка;
-Причинки за висулки Ø 4,5 мм и дължина 30 мм -10 бр .;
- Винтове M4 2 бр;
-Zubochistki;
-Maketnaya борда;
Микроконтролер ESP8266;
-Свързване на проводници;
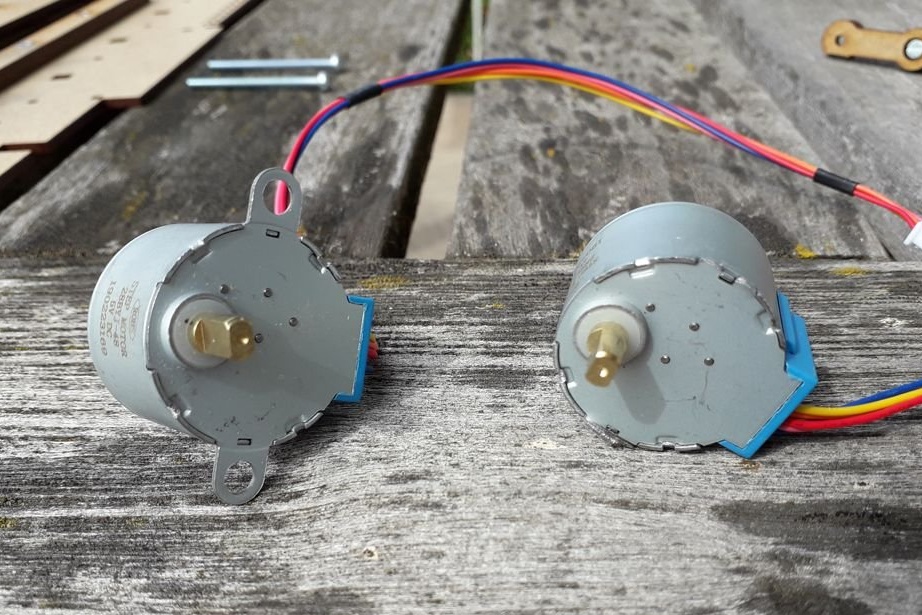
- двигател 28BYJ-48 с пулт за управление - 2 бр;
-Батерия 5V;
Първа стъпка: Преглед
В тази стъпка майсторът излага своето модела резервоар и също посочва връзката до мястото, където можете да видите резервоара в разглобен вид.
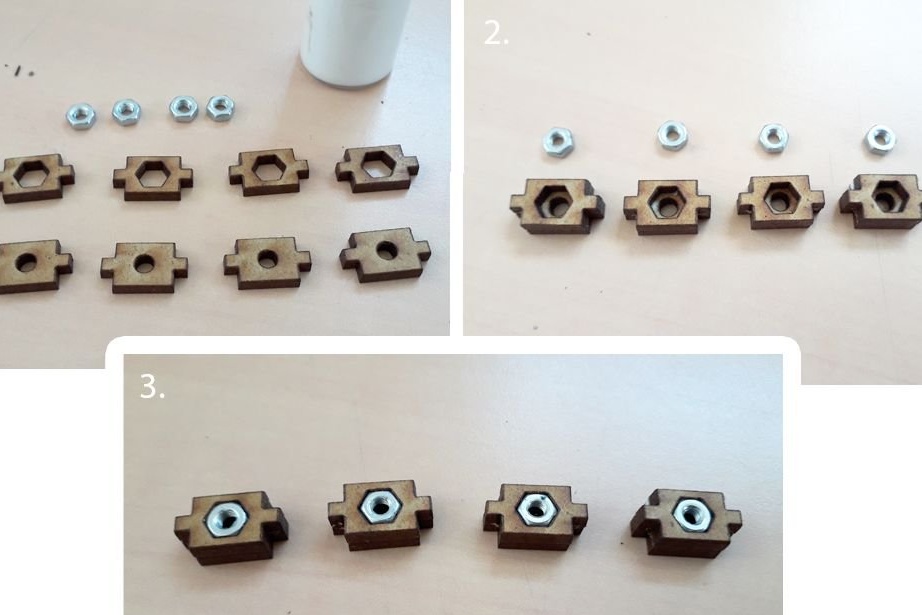
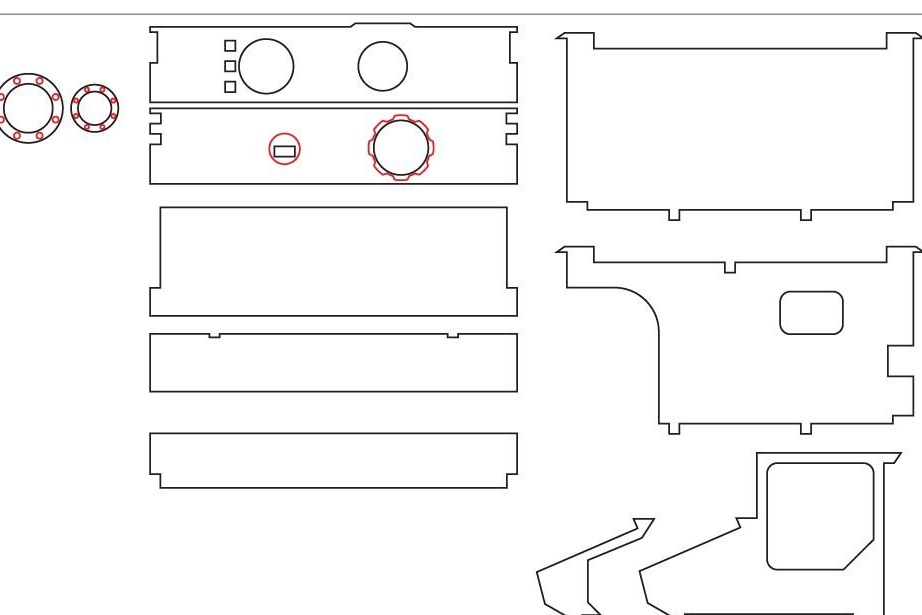
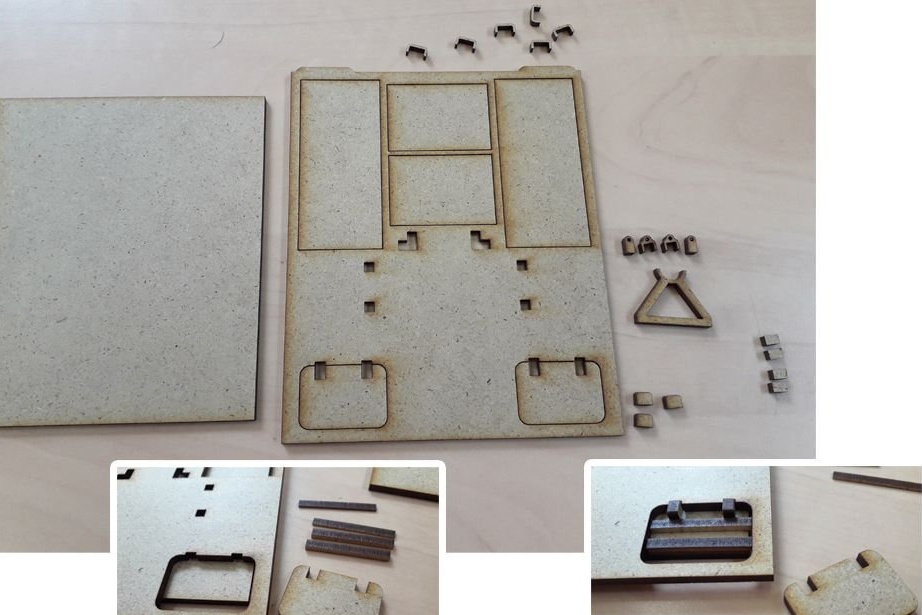
Втора стъпка: Отдолу
Господарят започва сглобяването от дъното на резервоара. Инсталира гайки в опори. Монтира се отстрани на дъното. Създава подкрепа. Задава втория слой.
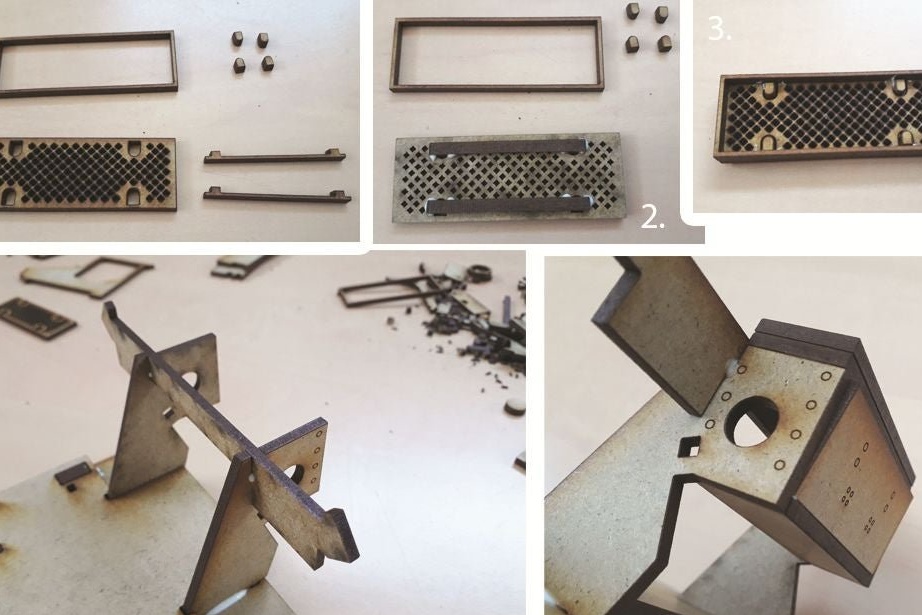
Трета стъпка: Случай
Започва сглобяване на тялото Сглобява радиатор и гръб.
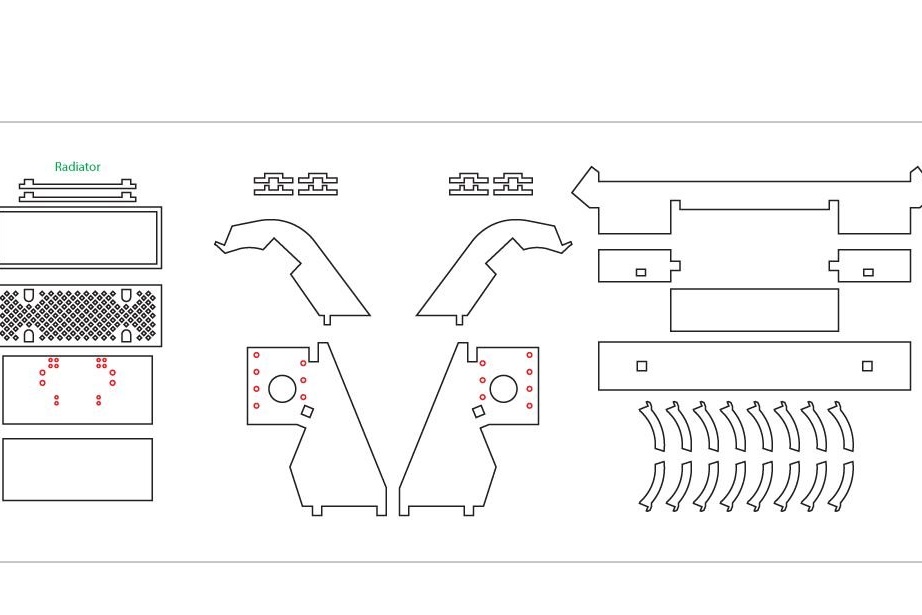
Събира предната част.
След поставянето на предната броня корпусът е завършен. Други части ще бъдат завинтени или залепени към него без залепване
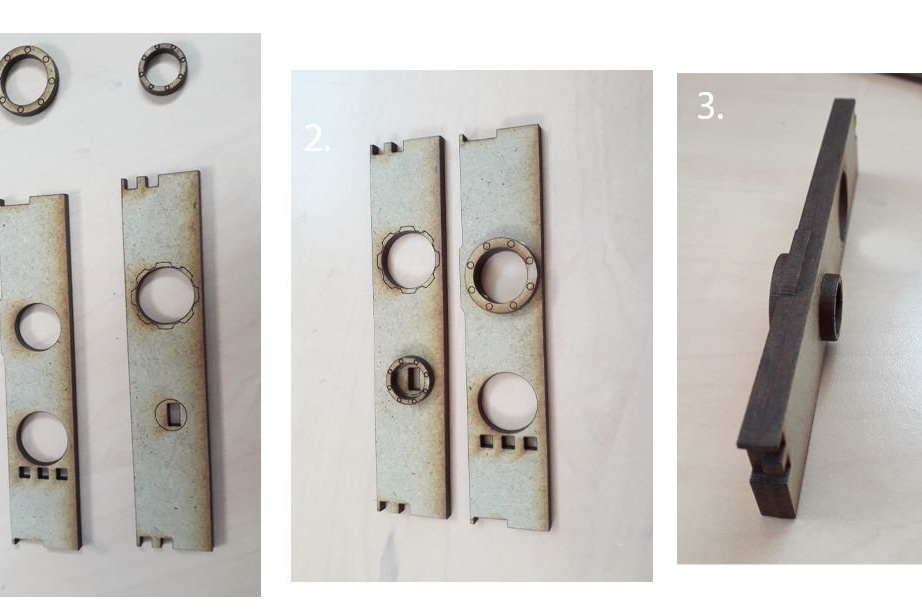
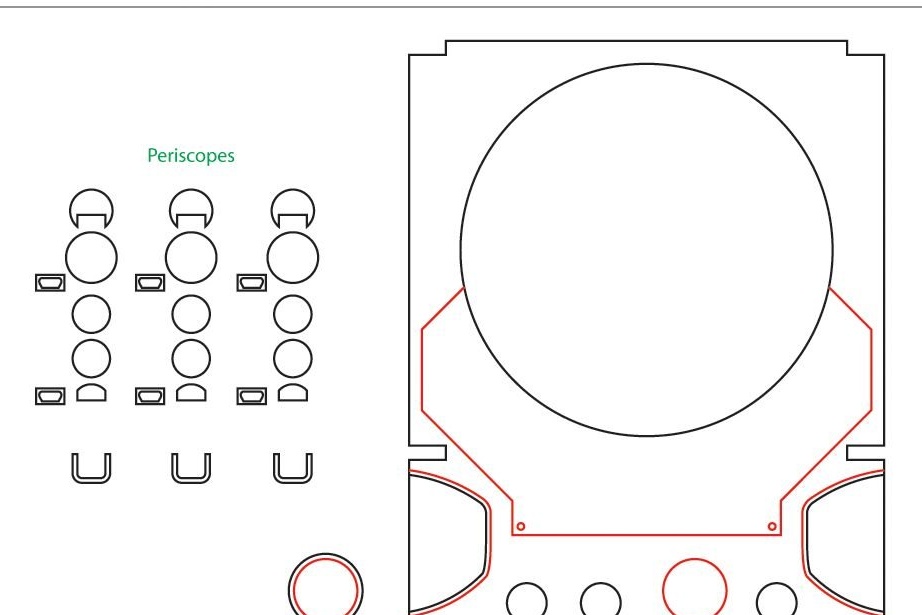
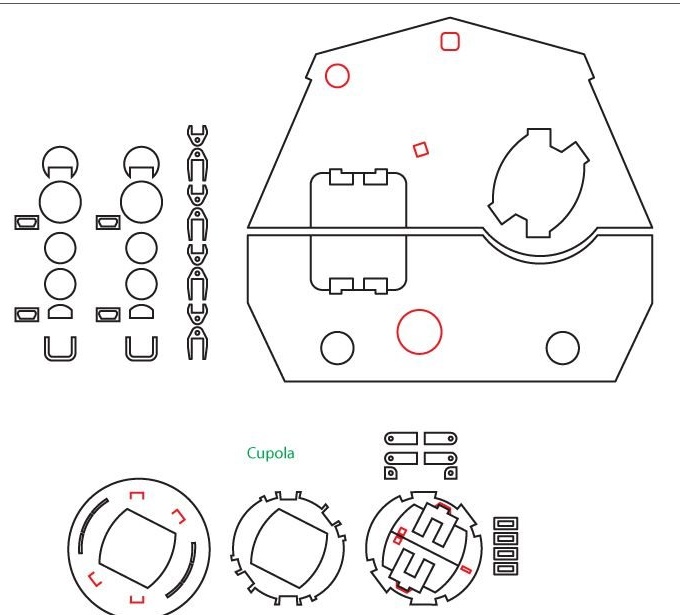
Четвърта стъпка: покрив и перископ
Тази част е подвижна част. Това се прави, за да има достъп до вътрешността. Перископният лост е инсталиран в края на покрива. Перископът е поставен на покрива, но не се придържа към него.

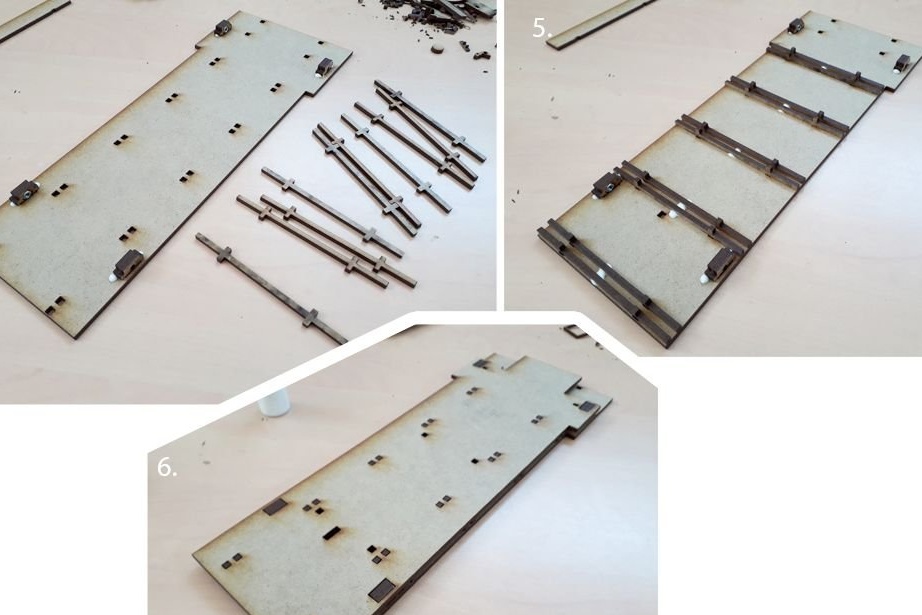
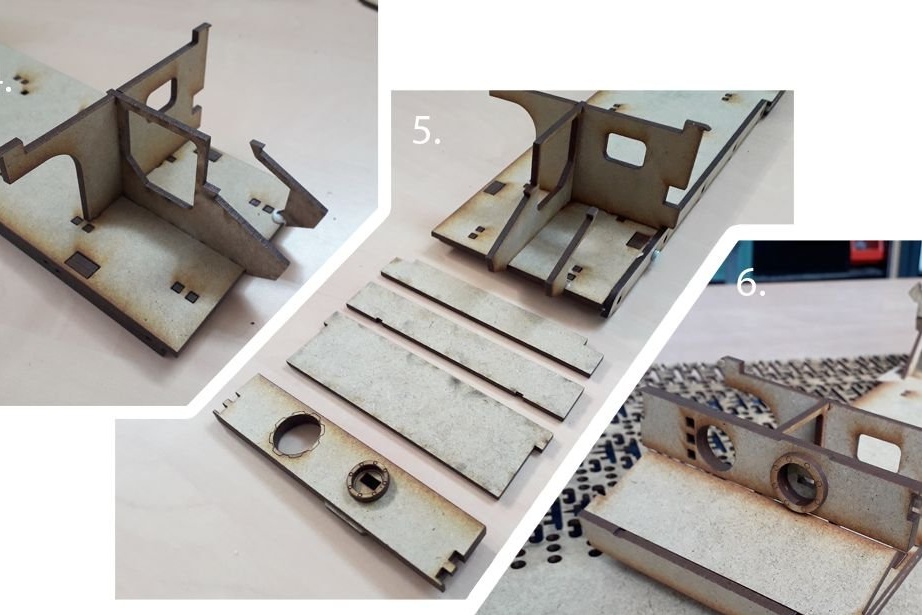
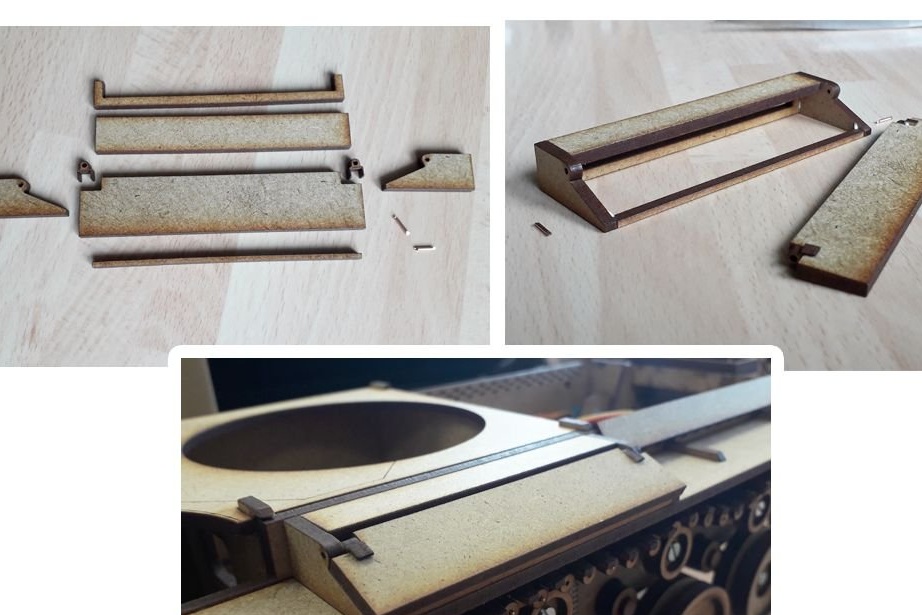
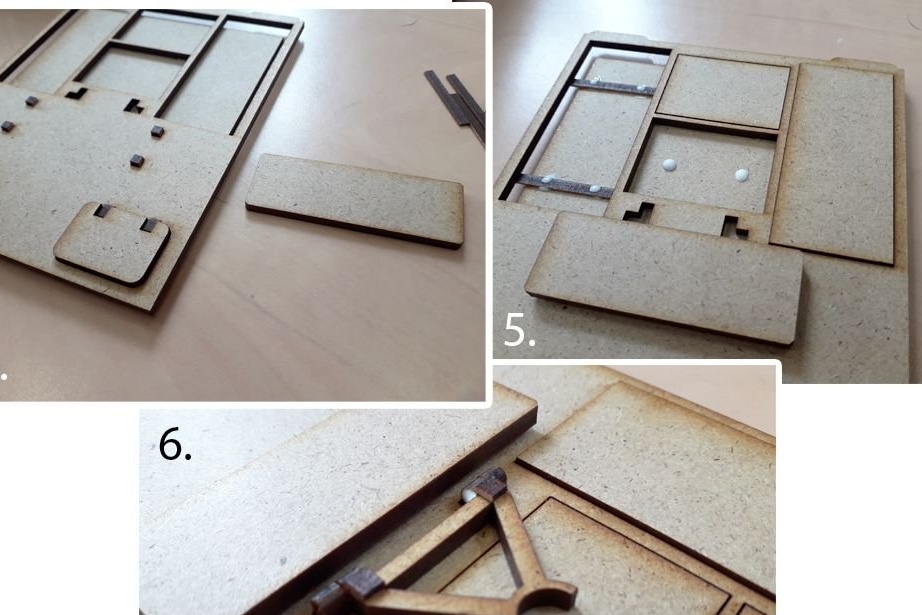
Стъпка пета: Странична
Рамките за окачване са монтирани на страничната стена. Той се завинтва към двойното дъно с 15 мм винтове с помощта на 4 гайки, които бяха закрепени в първата стъпка.



Стъпка шеста: Окачване
Сглобява и инсталира компоненти за окачване. Всички стъпки са отразени подробно във фотографиите. Нанесете малко лепило върху краищата на пружините за фиксиране. Вътре в пружините се поставят парчета клечки за зъби. Това ще попречи на пружините да изскочат.

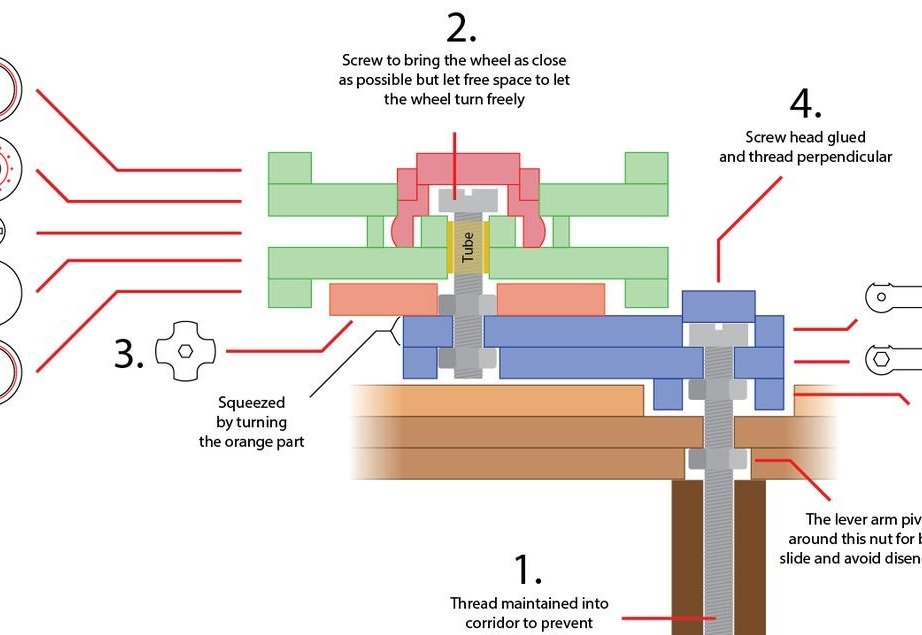
Сглобява и инсталира предното долно колело. Вътрешността на главината на колелото е монтирана месингова тръба и 20 мм винт. Тогава главината се затваря с тапа.
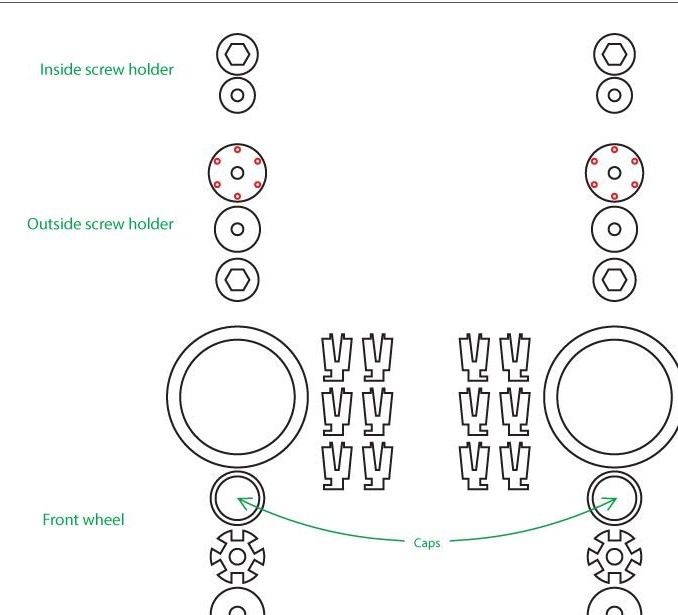

Сглобява и инсталира по-скоро колело.


Сглобява и инсталира задвижващи колела. Тези колела ще бъдат свързани с двигателите, инсталирани в резервоара на резервоара.
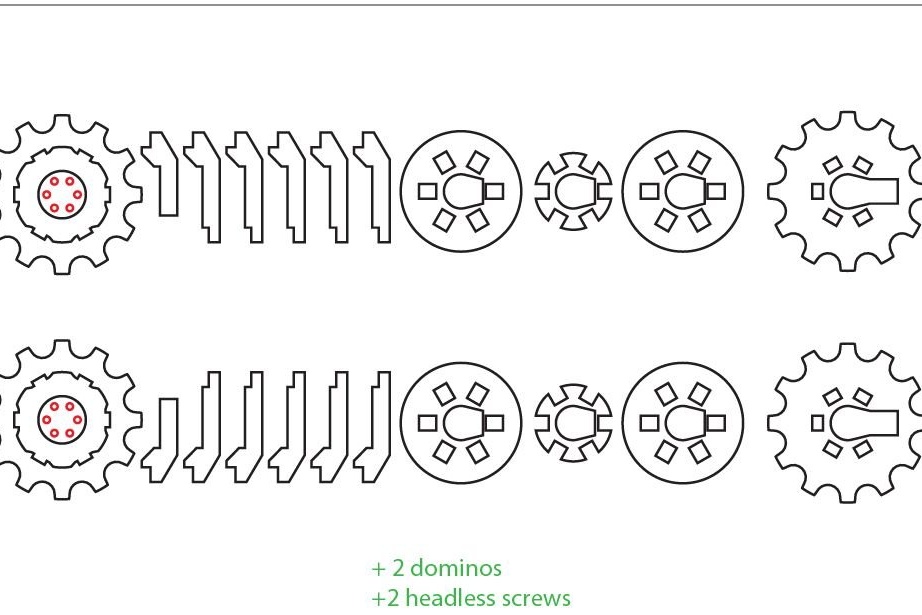
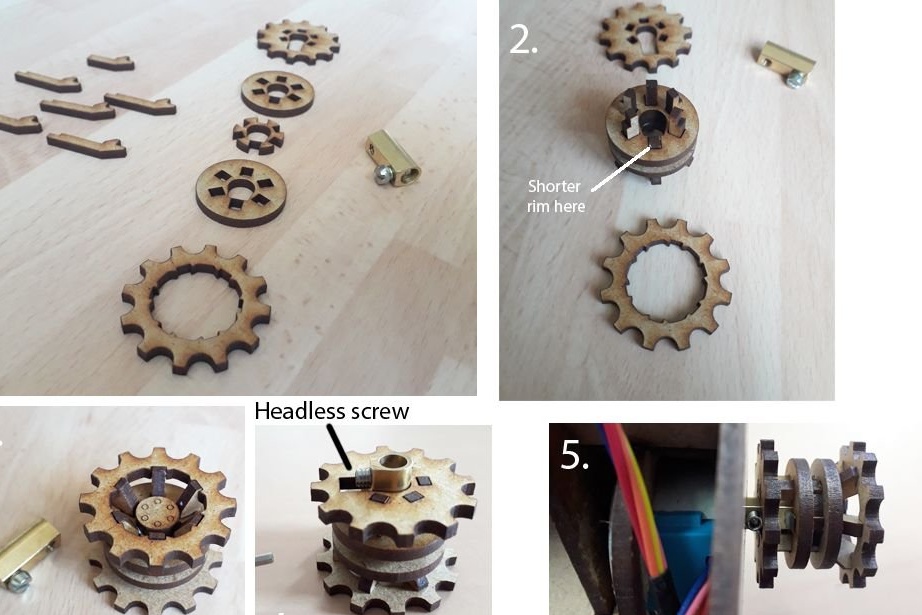
Инсталира тапи на колела.

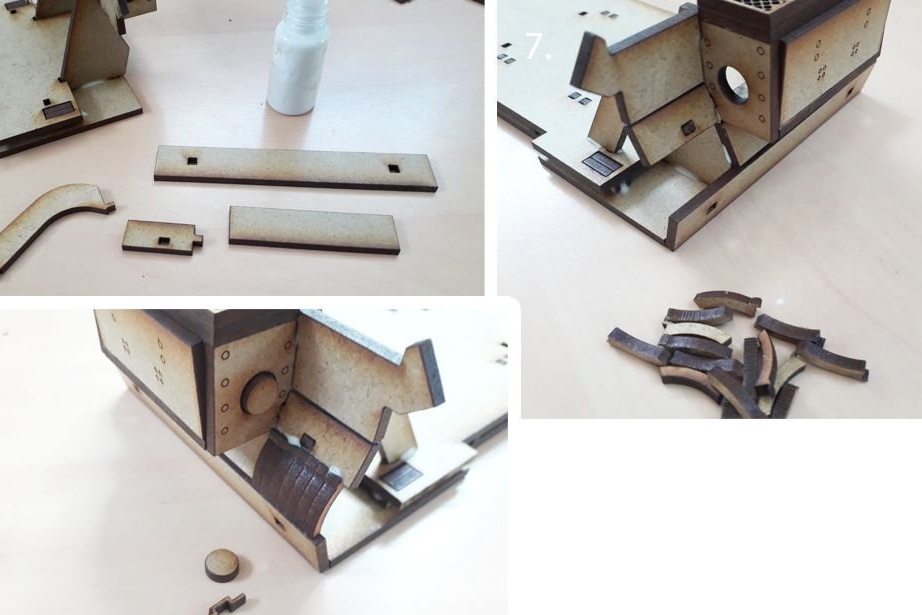
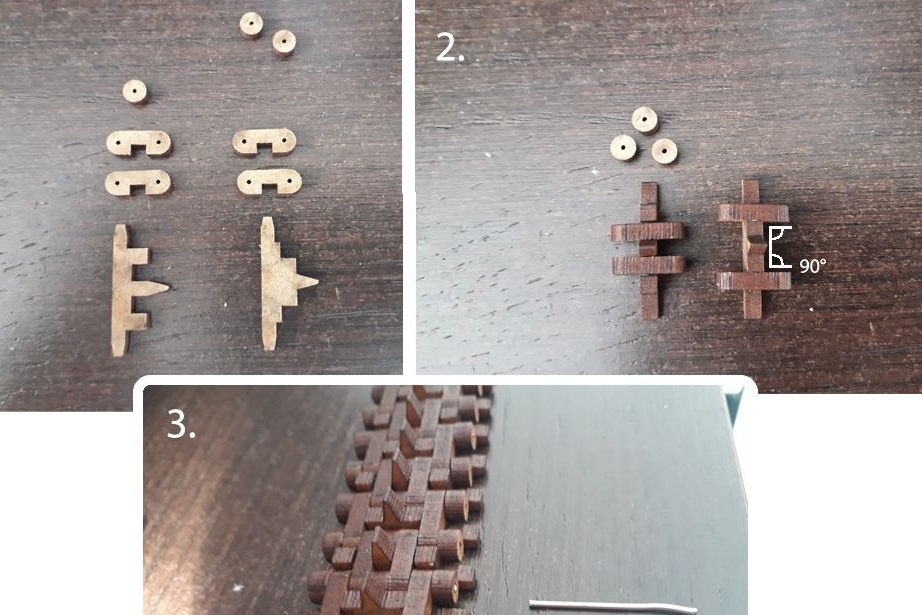
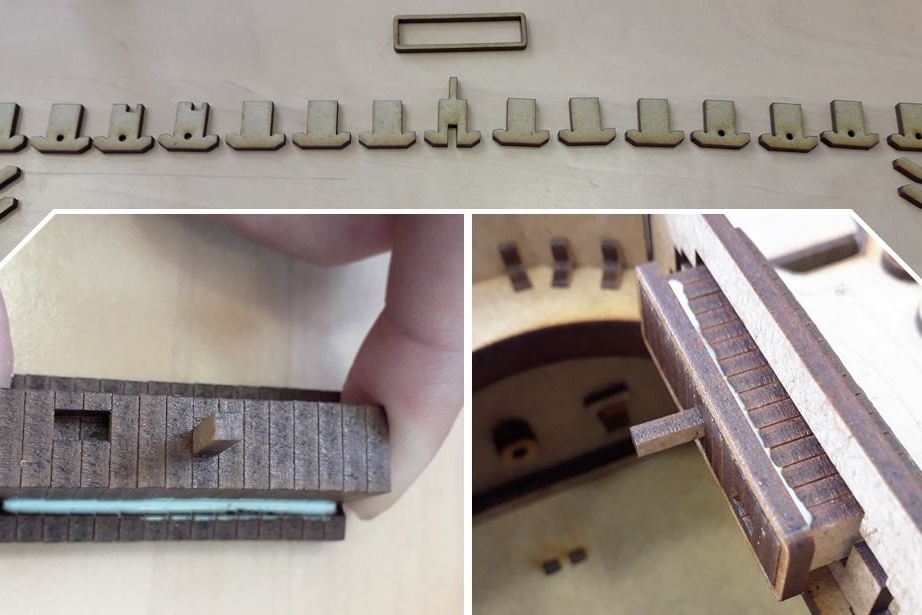
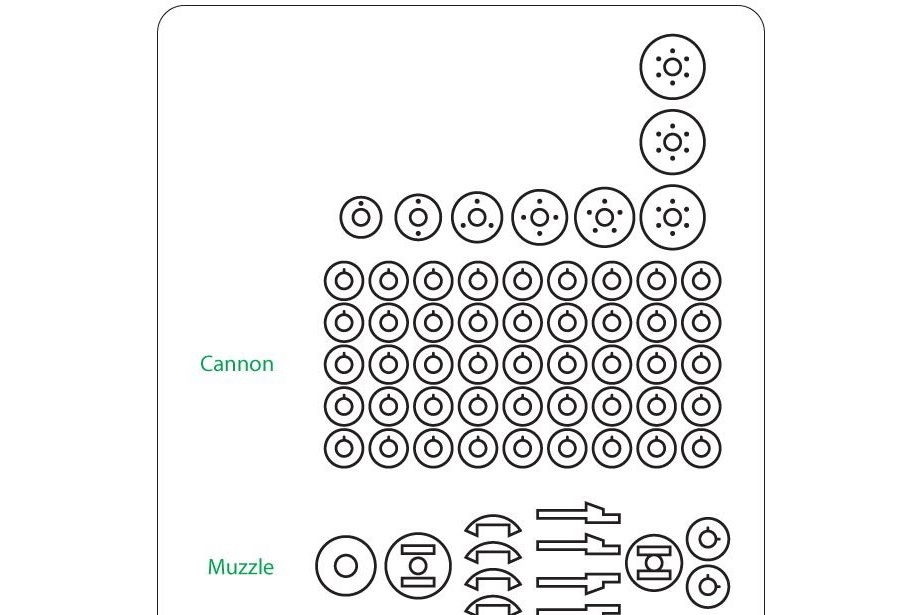
Стъпка седма: Проследяване
Събира следи от гъсеници. Пистите са закрепени заедно с тънка тел. Отстрани на жицата е фиксиран с капачки.
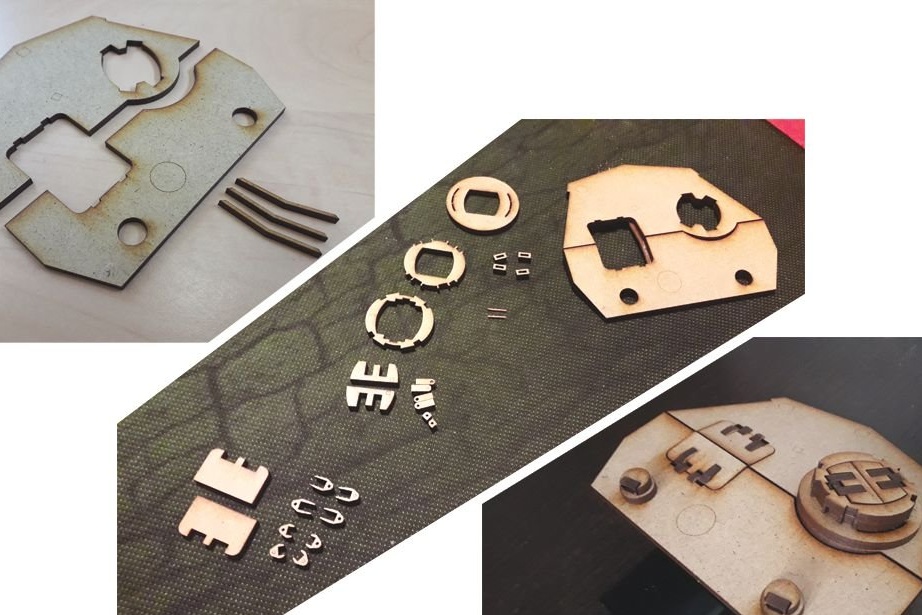
Стъпка осма: Защита от замърсявания и чекмедже
Инсталира щитове. Предната част на клапата е подвижна и може да се повдигне.


Задава чекмеджето. Като бримки се монтират парчета тел.
Стъпка девета: Гърбът
Тази част се намира зад кулата и ще покрие цялата електроника.
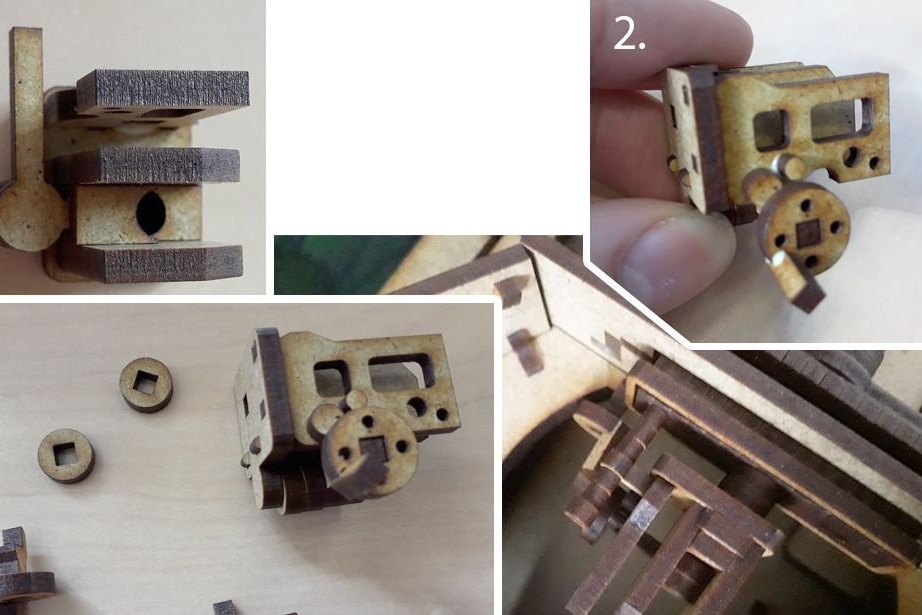
Стъпка десета: Кулата
Събира горната част на кулата и страничните стени.
Залепва стойката на пистолета.
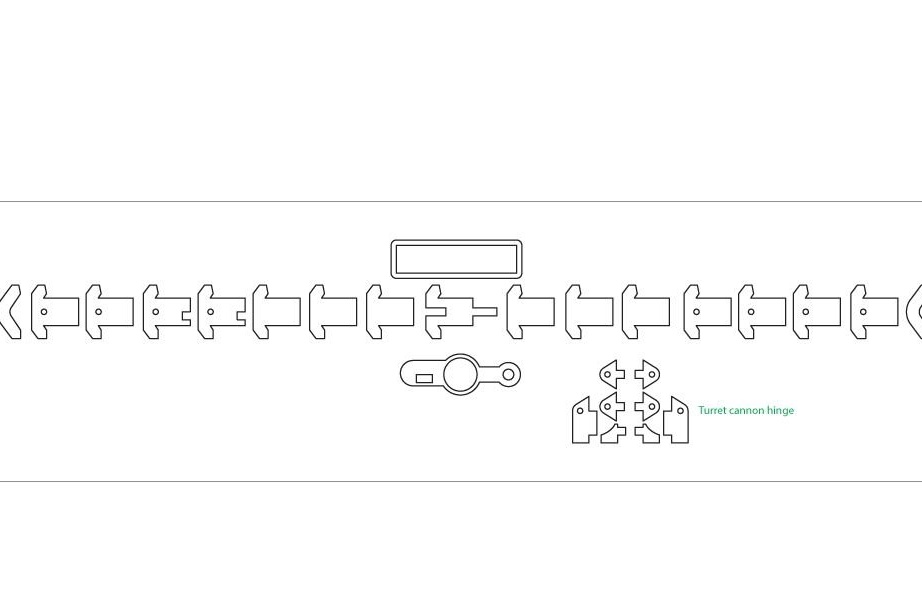
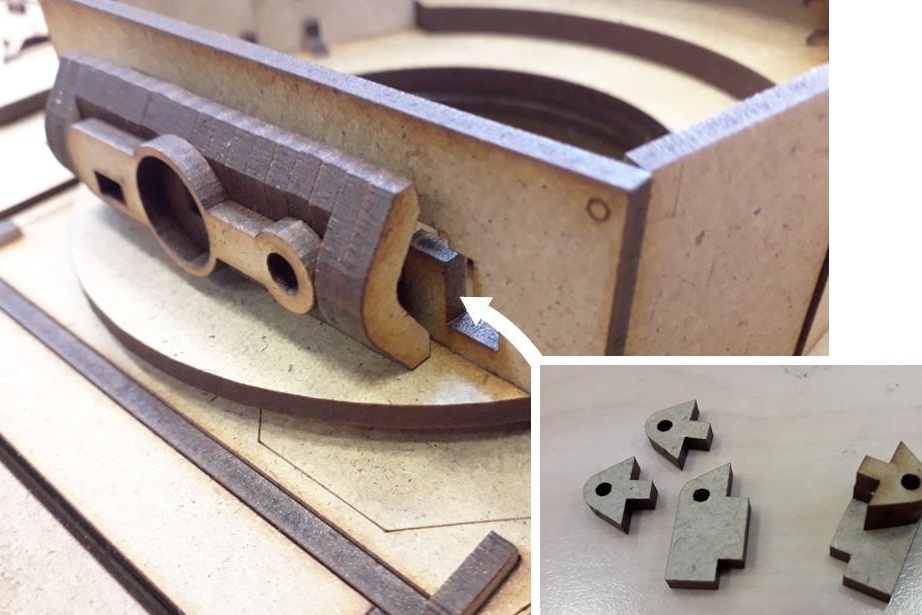
Задава вътрешния механизъм за закрепване и управление на пистолета.

Единадесета стъпка: пистолет
Събира пистолет Основният пистолет е метален прът. Останалите детайли са нанизани върху него.

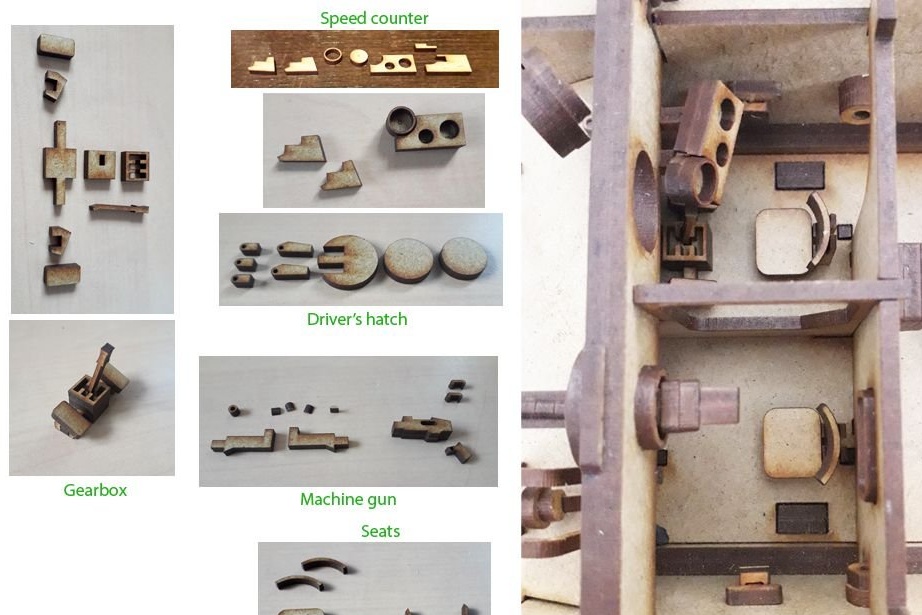
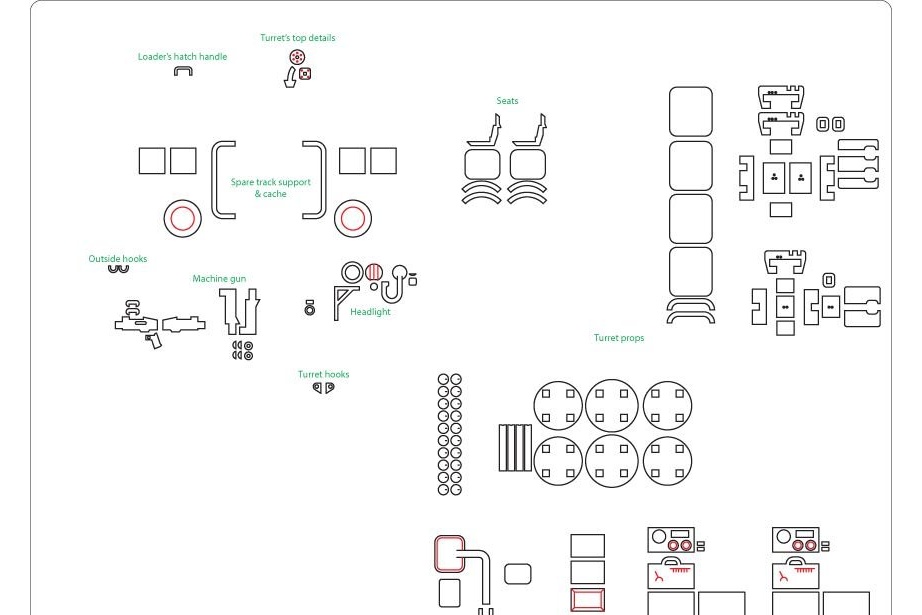
Стъпка дванадесета: малки детайли
Закрепя малки части от резервоара.
Вътре от лявата страна има седалка и картечница, отвън на цевта на картечница.
Отдясно на седалката на водача: седалка, лостове за управление и педали, люк.
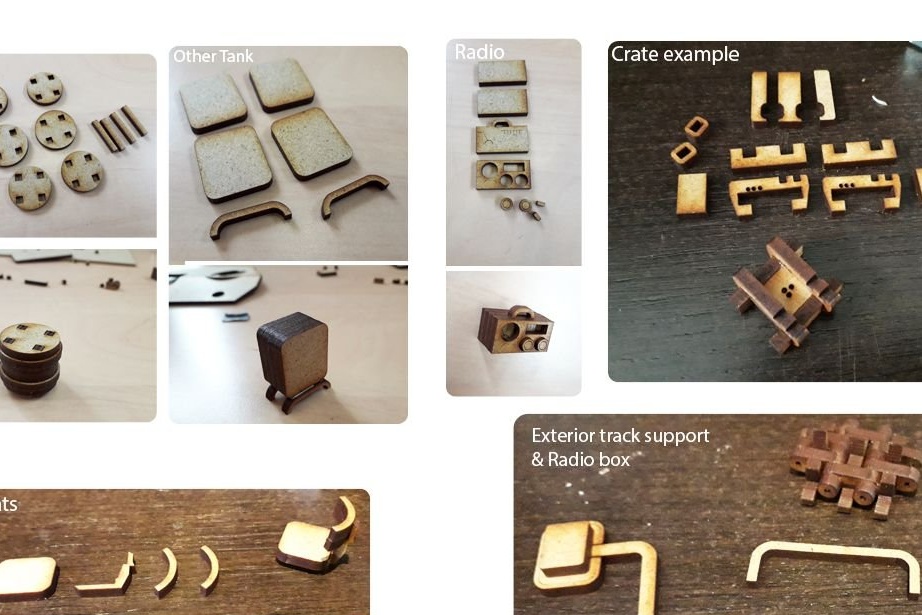
Отвън: куки, фарове, кутии, боеприпаси, телено въже и др.
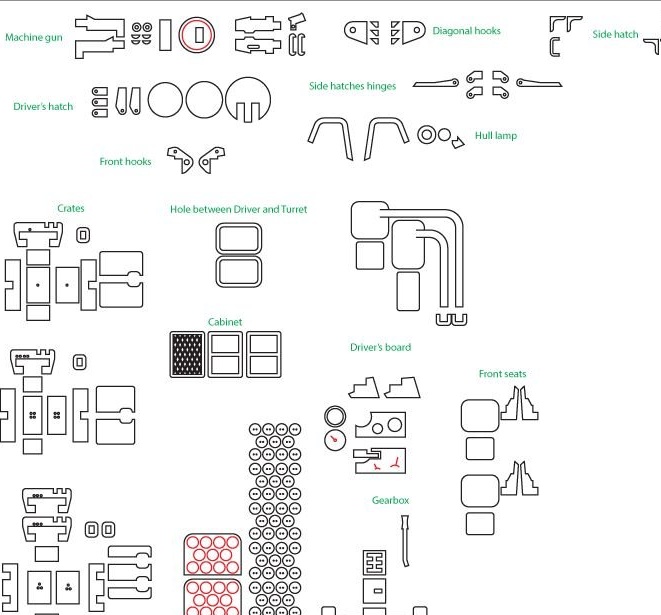

Резервоар под вода е фиксиран към кулата, уоки-токи вътре в кулата.

Стъпка тринадесета: Електроника
Инсталира двигатели. Извършва инсталирането на електронната част съгласно схемата.
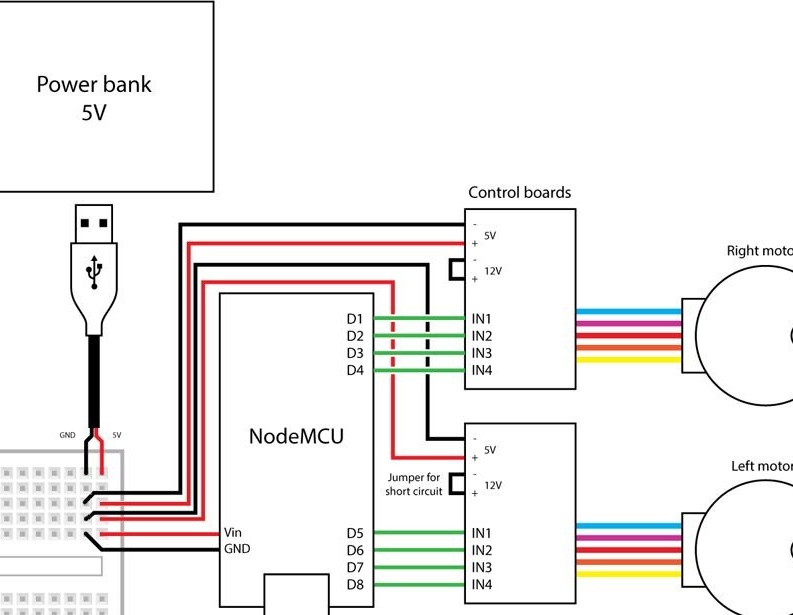

За безжично управление избрах контролера NodeMCU. Моделът се управлява чрез NodeMCU и приложението Blynk (достъпно на Android / iOS). Това приложение предоставя напълно адаптивен HUD за контрол от всеки Arduino или iOS телефон чрез WiFi.
Така че, след като инсталирате приложението, първото нещо, което трябва да направите, е да създадете акаунт.
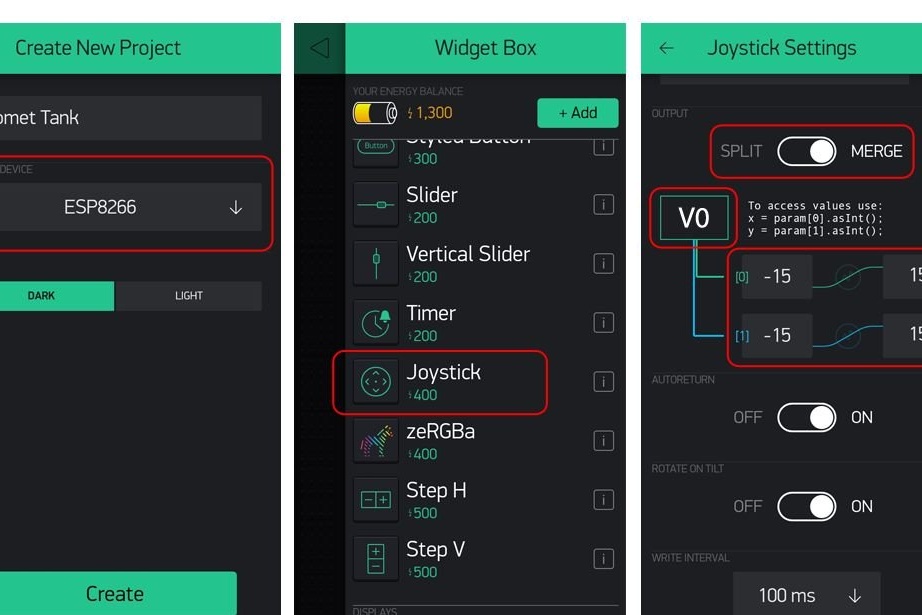
Създайте нов проект и задайте ESP8266 (NodeMCU чип) като микроконтролер и задайте WiFi режим.
Веднага щом видите HUD, създайте джойстик. Изпратете информацията за джойстика на виртуалния щифт V0 на възела.
След като създадете джойстик, щракнете върху него, за да отворите настройките му. В позиции X и Y задайте диапазона от -15 до 15.
Инсталирайте библиотеки.
Първо, изтеглете библиотеката Stepper2 тук: https://github.com/udivankin/Stepper2
Тази библиотека е добър вариант за евтини стъпкови мотори, като този, който е използвал капитанът. По-добре управлява фазите на двигателя и осигурява по-добър въртящ момент. След като изтеглите .zip файла, го инсталирайте от софтуера на Arduino: Скица> Включете библиотека> Добавяне на .ZIP библиотека ... и го изберете.
След това, ако никога не сте мигали NodeMCU, имате нужда от компютър, за да го разпознаете. Arduino IDE има мениджър на дъски, на който са инсталирани правилните драйвери.
Копирайте следния ред:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonОтворете настройките и ги поставете в URL адресите. Запишете настройките и отидете до диспечера на контролера в Инструменти> Съвет> Мениджър на дъски. Картата ESP8266 трябва да присъства в края на списъка. Съветникът избра версия 2.5.0 с IDE в 1.8.9.
Имате нужда и от библиотеката Blynk, която можете да намерите на Sketch> Включване на библиотека> Управление на библиотеки ... и след това намерете Blynk в полето за търсене.
Отидете в настройките на проекта и изпратете означение до вашия адрес, който е голям низ, който позволява на телефона ви да разпознава NodeMCU, когато е включен. Копирайте маркера от наскоро получената поща и го поставете в масива auth.
Сега можете да инсталирате фърмуера.
Comet.ino
Всичко е готово, сега можете да се насладите на работата си.