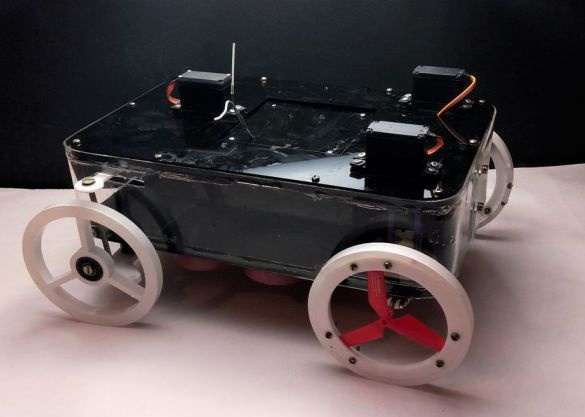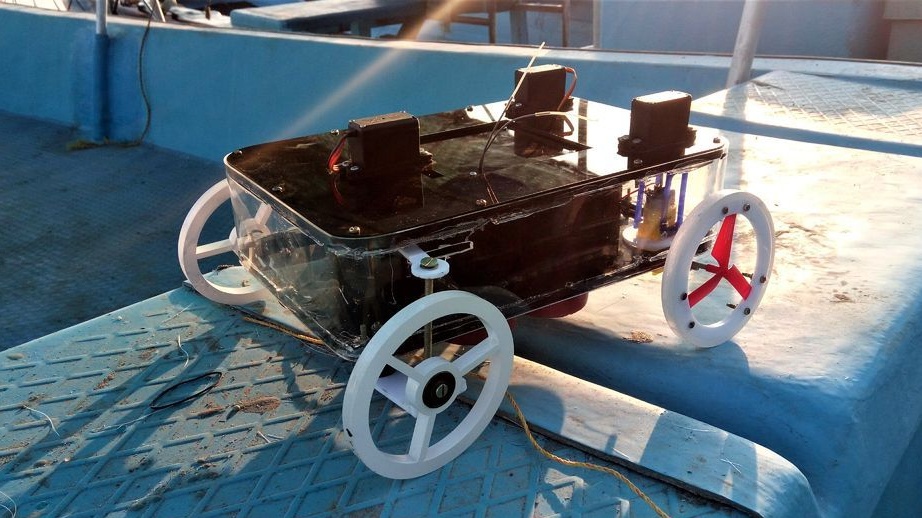



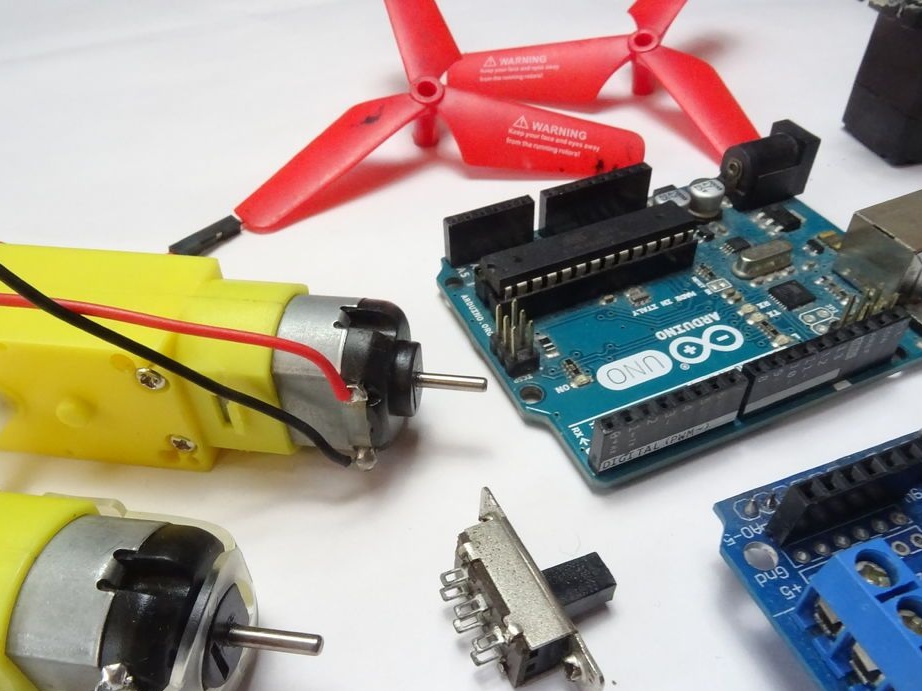
В тази статия ще разгледаме производството на индийски занаятчии на мотоциклети, които се движат както по суша, така и по вода. Всички теренни превозни средства се състои от плаваща платформа с колела и витло. Механизмите се управляват с дистанционно управление чрез Arduino UNO.
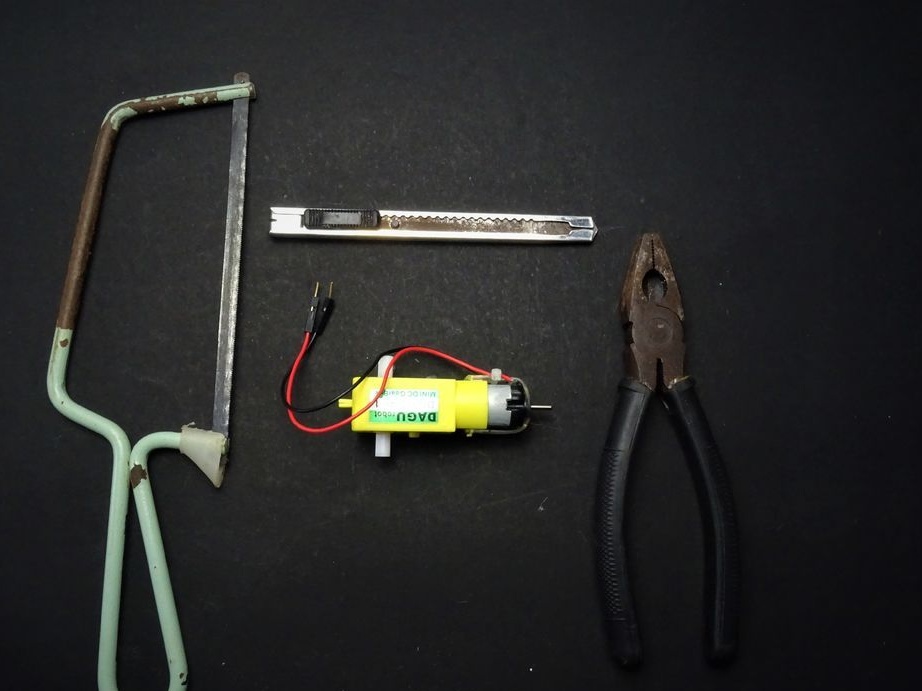
Инструменти и материали:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
(за справка, лагерът е 8 x 16 x 5 mm, авторът посочва 8 * 22 mm)
-Две витла;
-Krepezh;
-Poplavki;
-Лесен пистолет;
-Супер лепило;
Епоксидна смола;
-Поядащо желязо;
-Drel;
-Лазерна резачка;
-Pila;
- отвертка;
-Drel;
-Поядащо желязо;
А плочи;
-Компютър със софтуер;


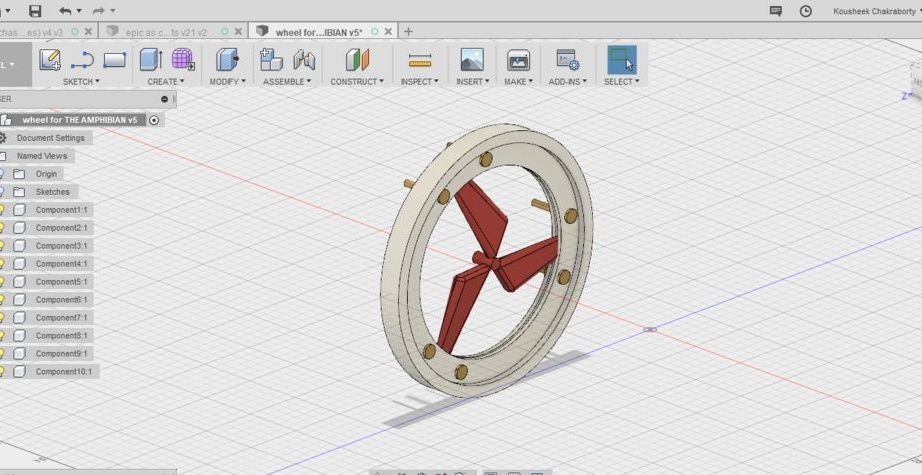
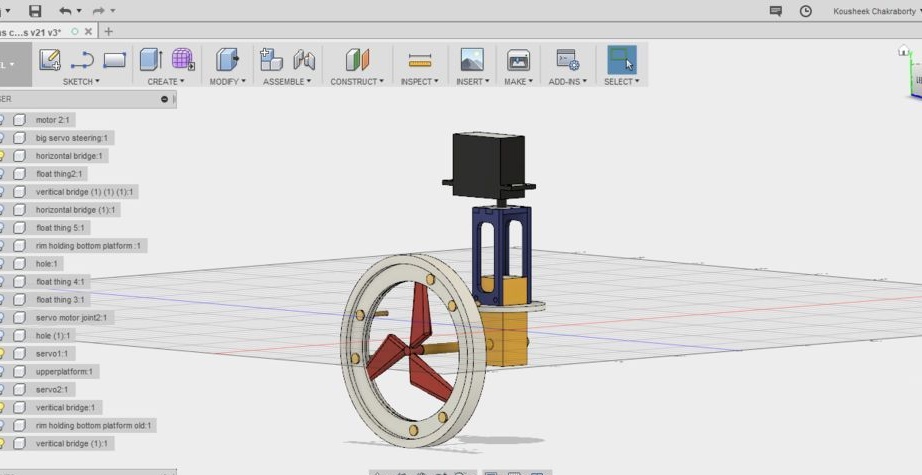
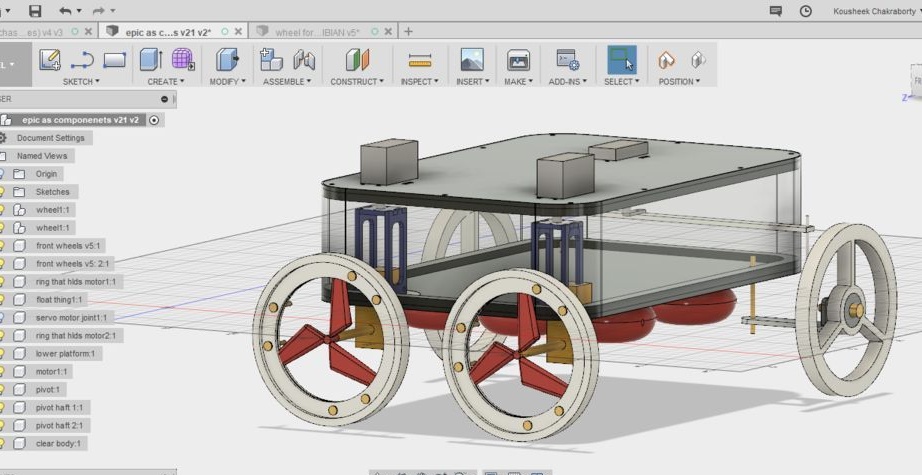
Първа стъпка: Дизайн
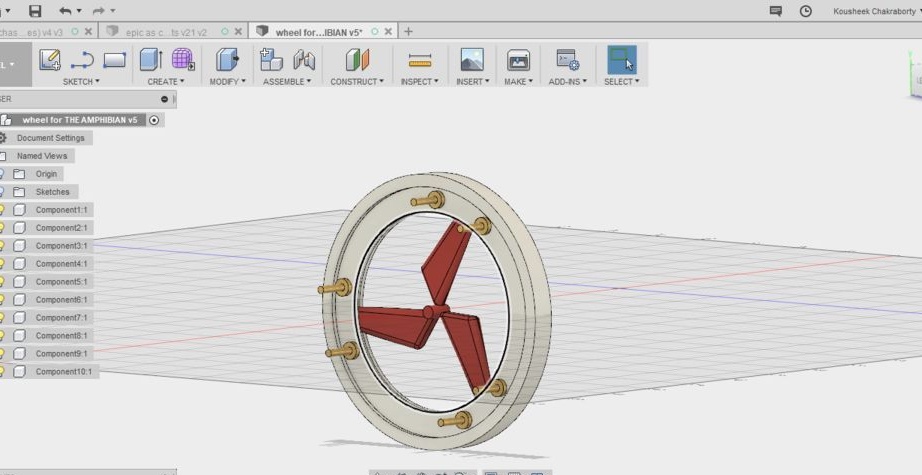
За да създадат проекта, майсторите използваха програмата Fusion 360. Цялата трудност беше да съчетаят движението по суша и във вода. При проектирането на колелата майсторите разработиха система, при която винтовете ще се отворят във водата, но с оглед сложността на дизайна, те просто интегрираха витлата от детската играчка вътре в колелото. Това позволява на колелата да придвижват кацането на всички терени по суша, а когато влязат във водата, винтовете са включени.
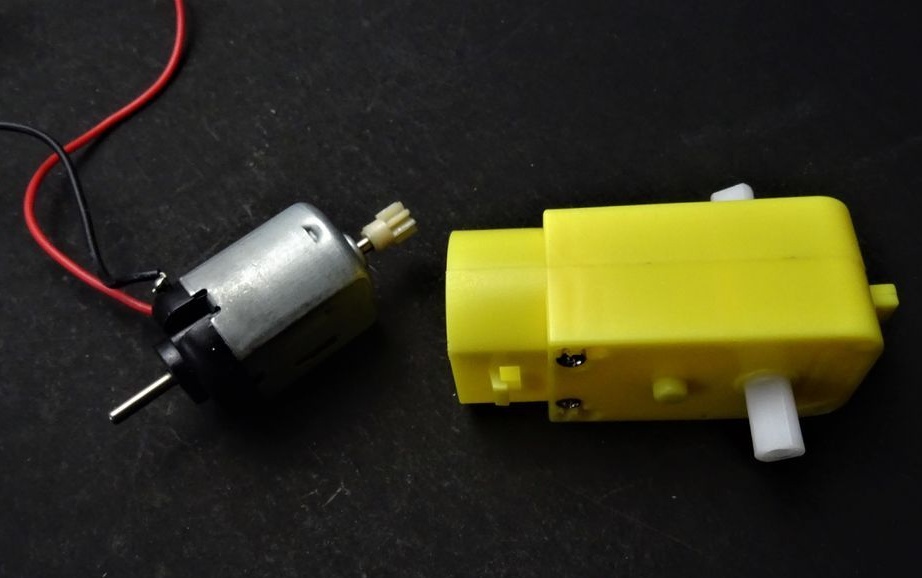
За да осъществите тази идея, трябва да можете да завъртите задните колела перпендикулярно на превозното средство на терен, когато шофирате по вода. Това стана възможно, когато предавките на двигателя бяха извадени от рамката. Пластмасовите редуктори и водата, влизаща в тях, няма да навредят.
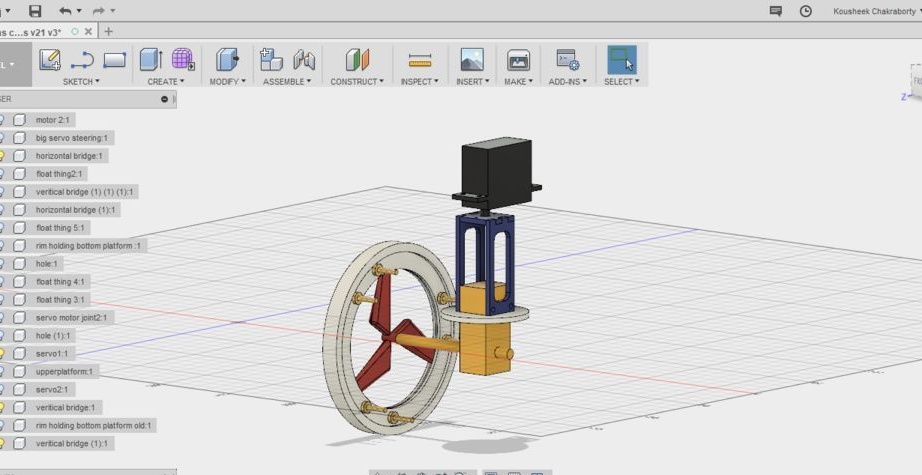
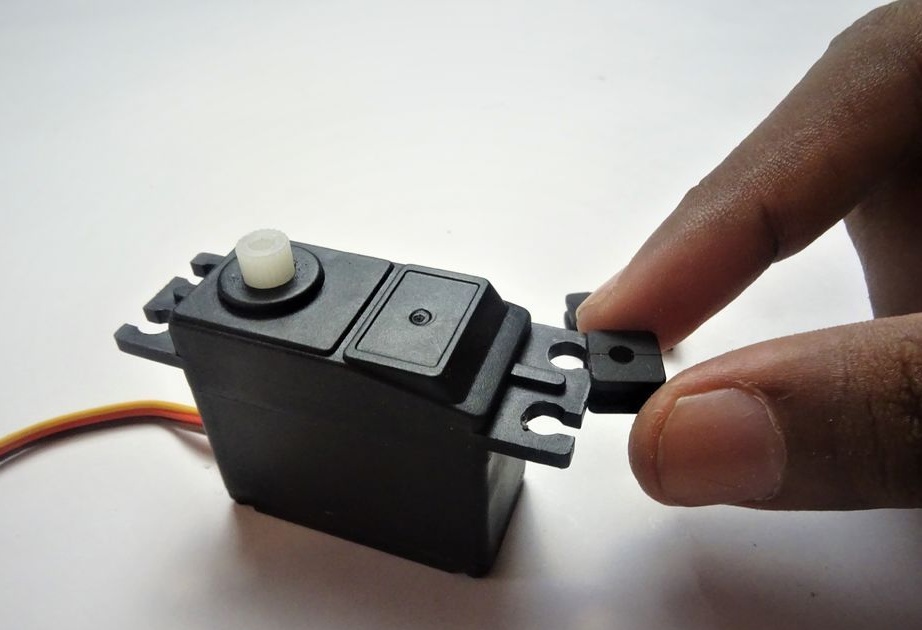
Завъртането на винтовете на колелата ще се извърши с помощта на серво задвижване.
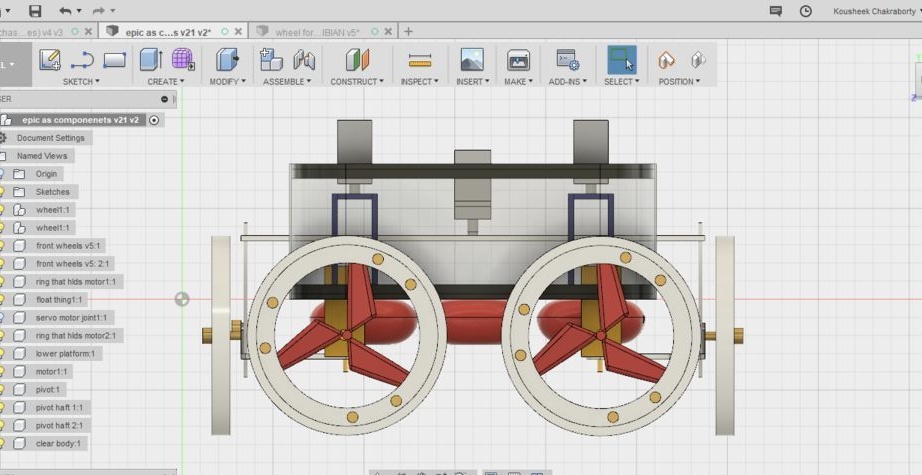
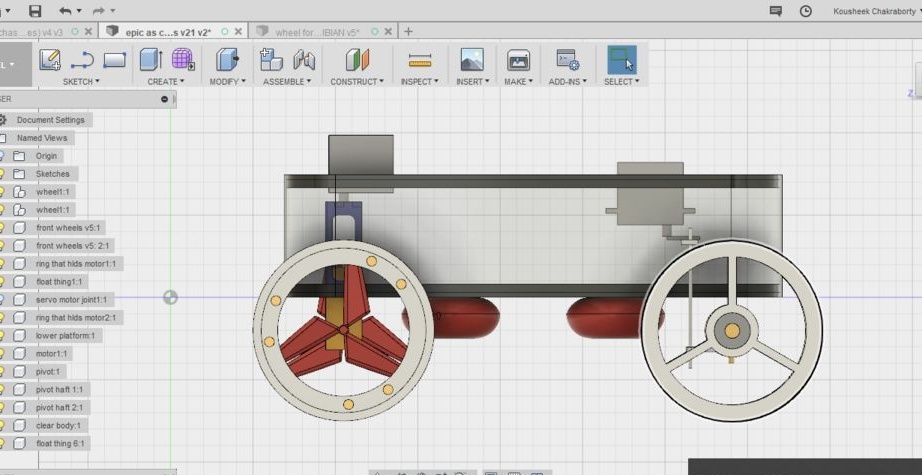
Цялото теренно превозно средство има два механизма за завиване. Единият за управление на задните колела на витлата във водата, а вторият, за да кара по суша, контролира предните колела. Ъгълът на въртене на предните колела е 35 градуса, което ви позволява да правите резки завои.
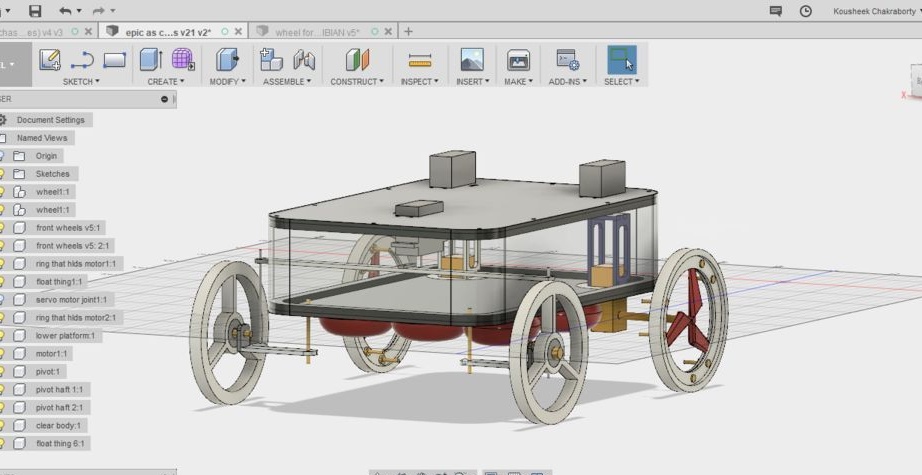
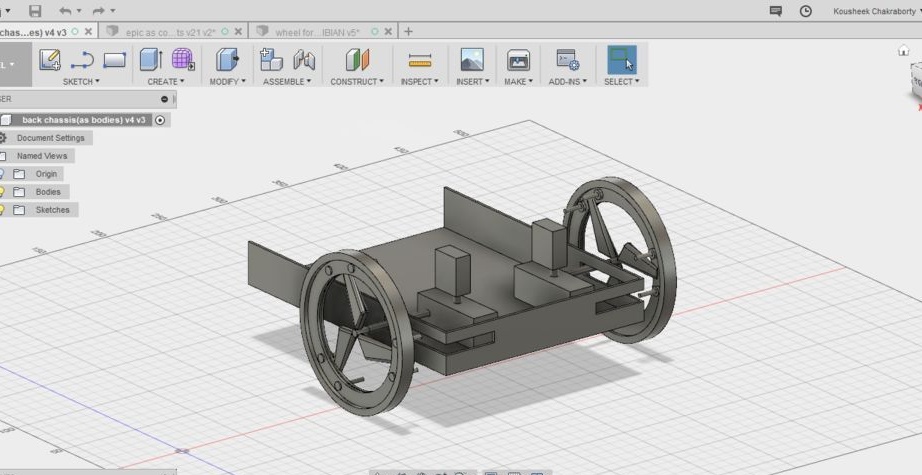
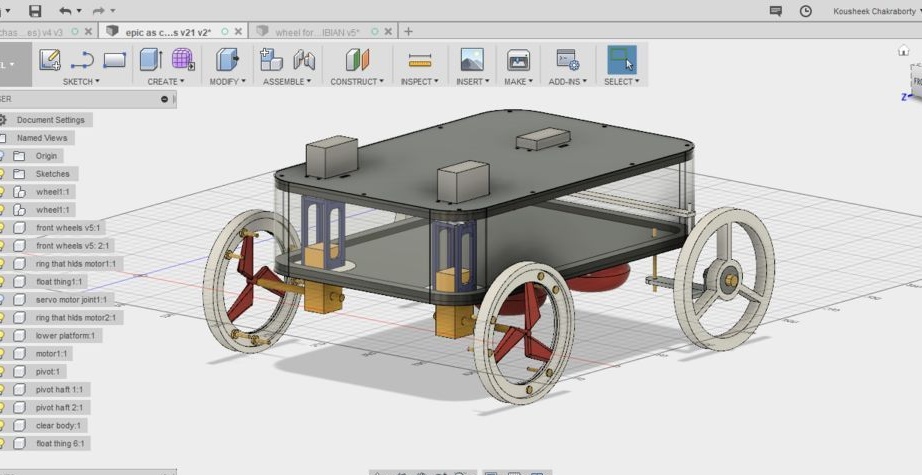
На снимките по-долу можете да видите трансформацията на превозното средство с терен, когато се движите през земя и вода.
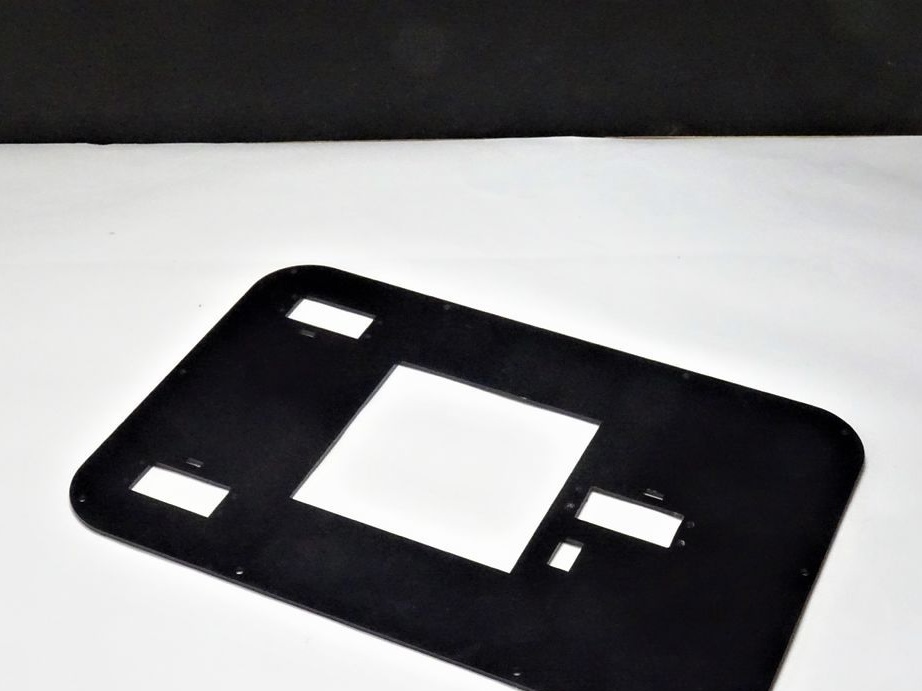
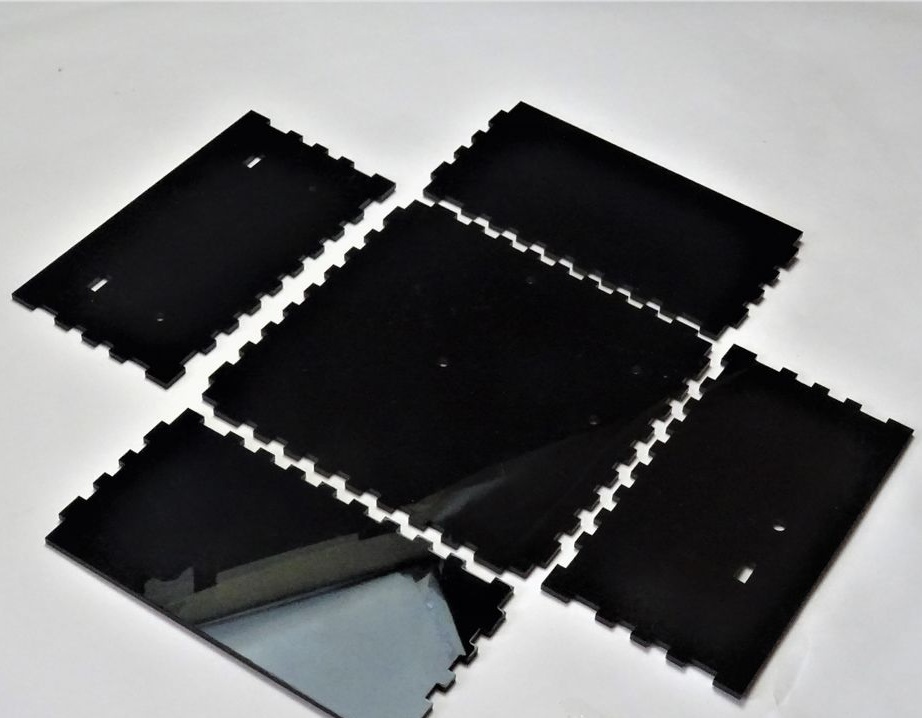
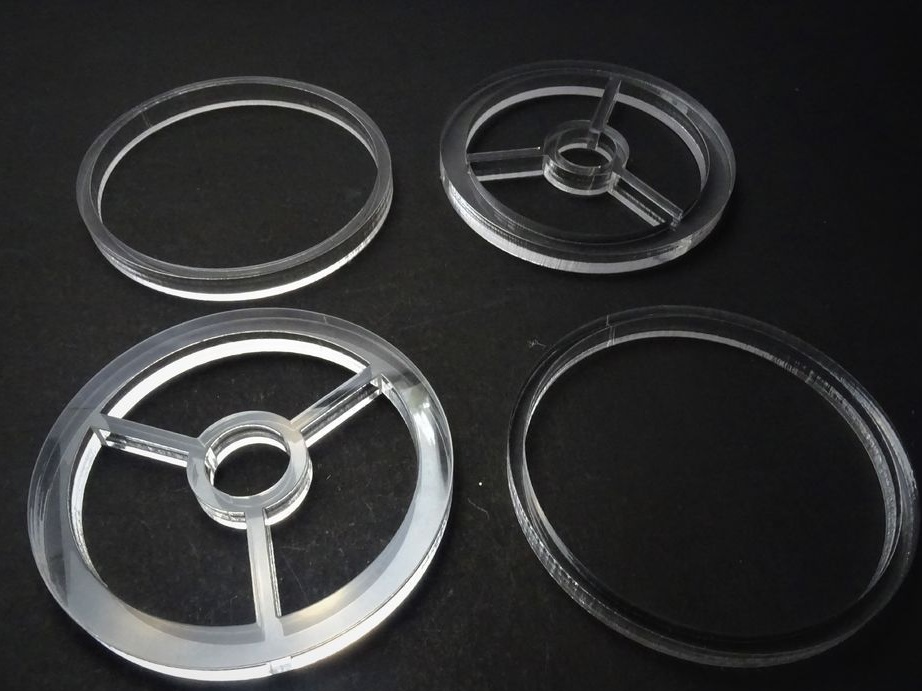
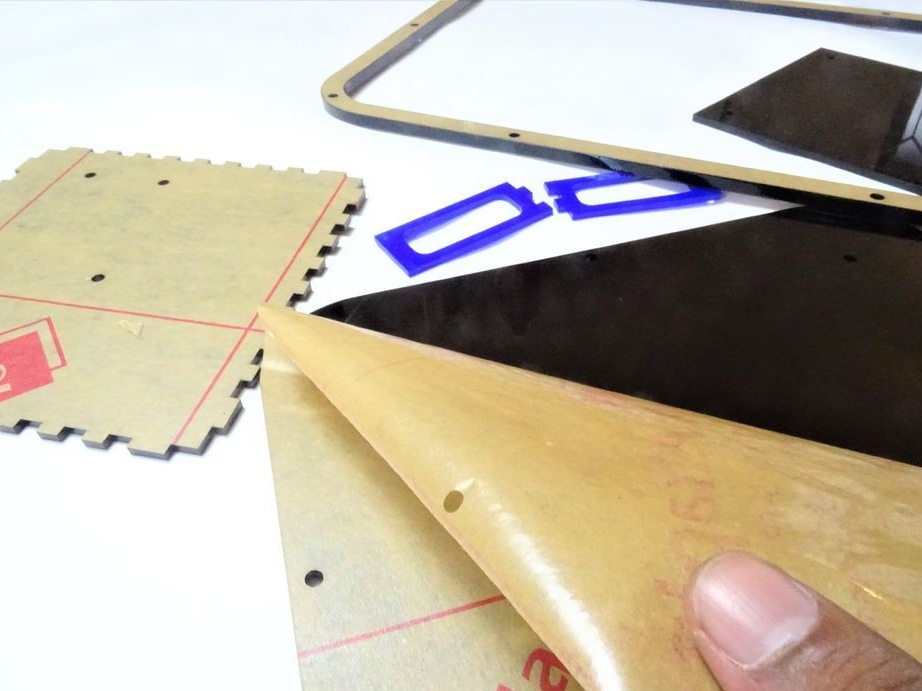
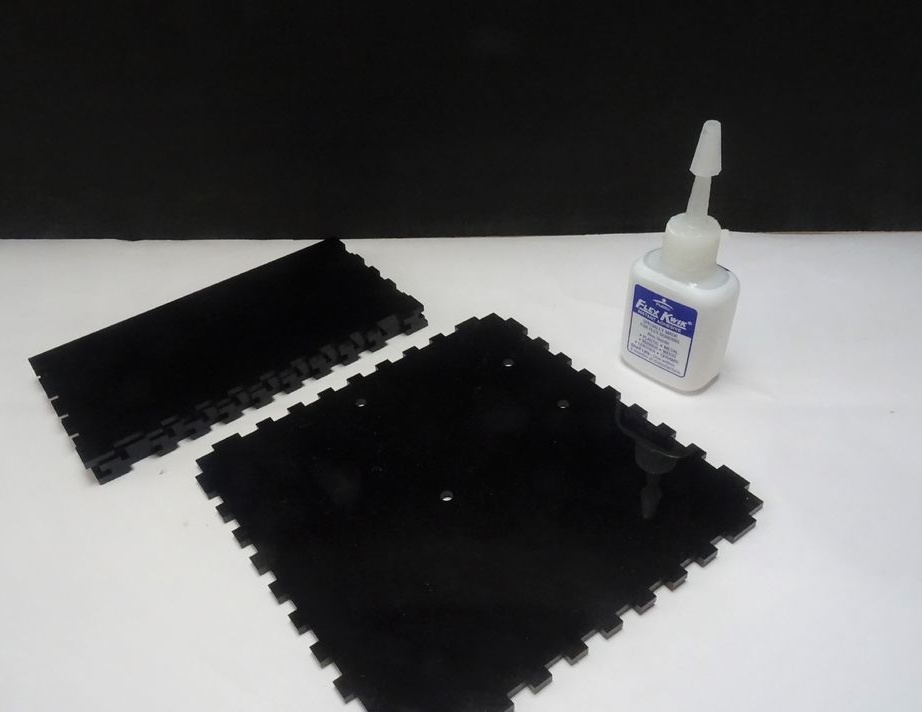
Втора стъпка: Лазерно рязане
За превозното средство с общо предназначение майсторът използва акрил с различна дебелина и цветове.
Черен горен слой 3 mm x 1
Долен слой черен 3 мм х 1
Черна странична рамка 5 мм х 2
Странична стена прозрачна 2 mm x 1
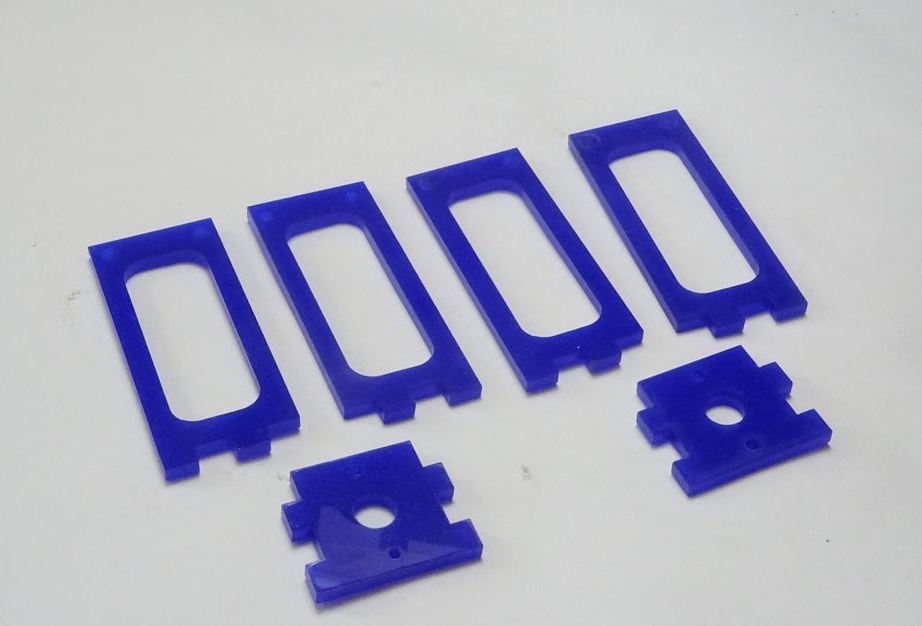
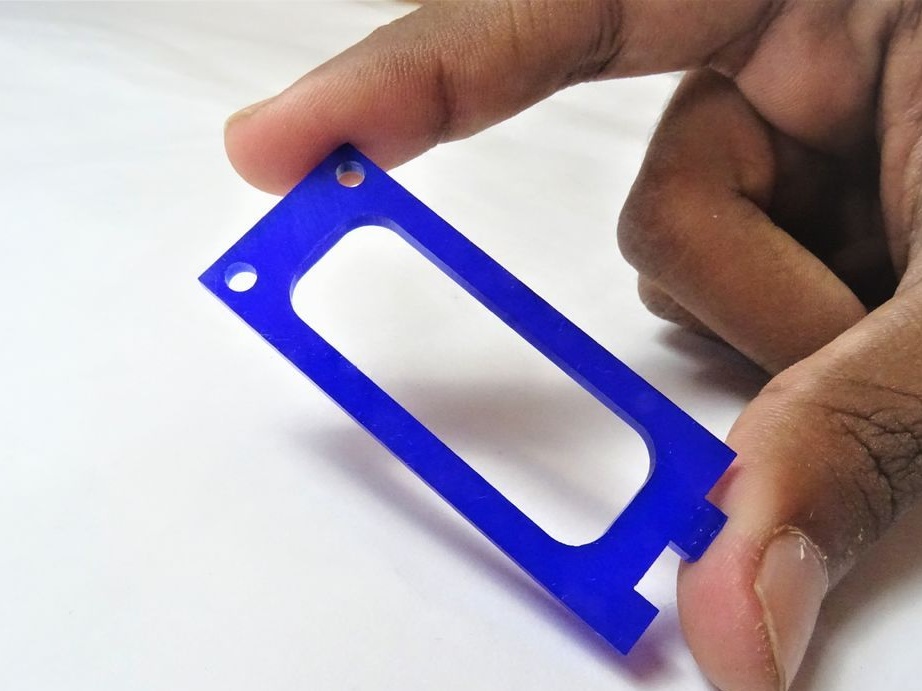
Сила страна синя 3 mm x 4
Мост отгоре парче син 3 мм х 2
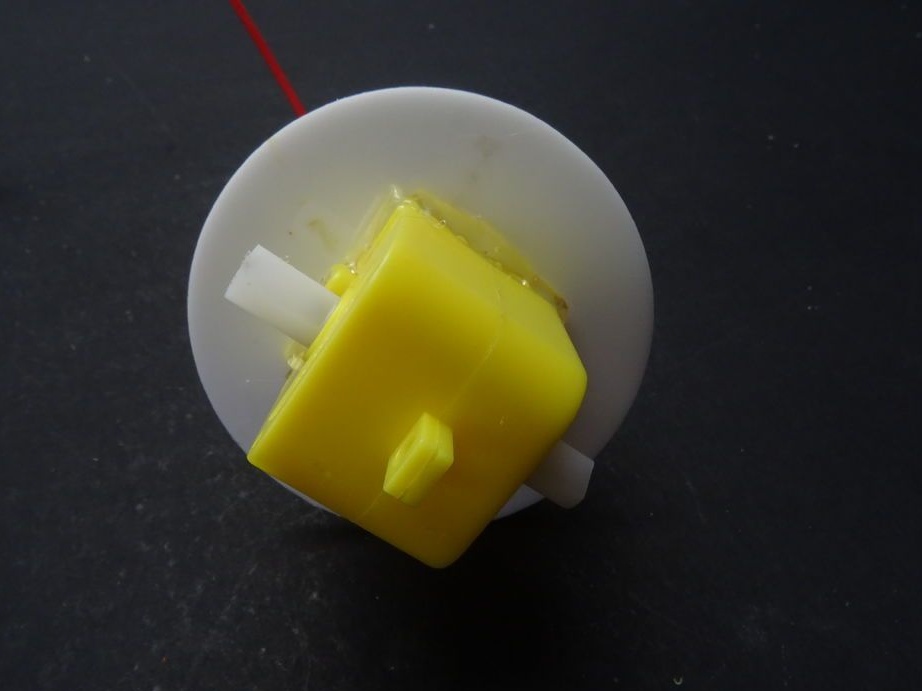
Диск на двигателя бял 3 mm x 2
Предно колело бяло 10 mm x 2
Вътрешен джант (задно колело) бял 3 mm x 4
Външна джанта (задно колело) Бяла 10 mm x 2
Волан бял 3 mm x 1
Шкаф за чекмедже Черен 3 мм х 1
Черен капак на отделението 3 mm x 1
Заден вал на двигателя Бял 3 mm x 2
Черен панел бял 5 mm x 2



Можете да изтеглите файла за ЦПУ от връзката.
Лазерно рязане Rover Parts.zip
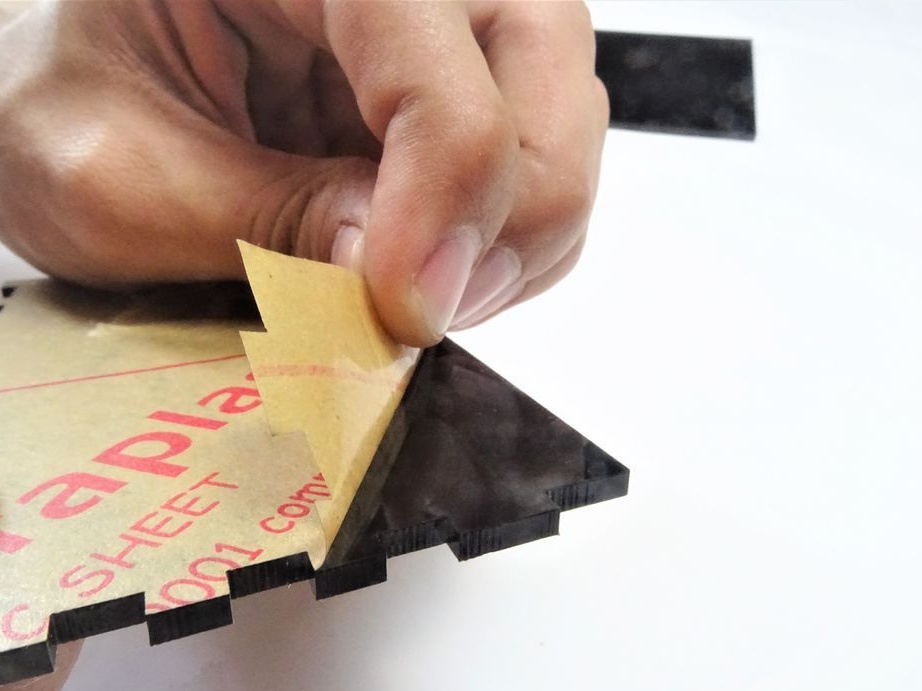
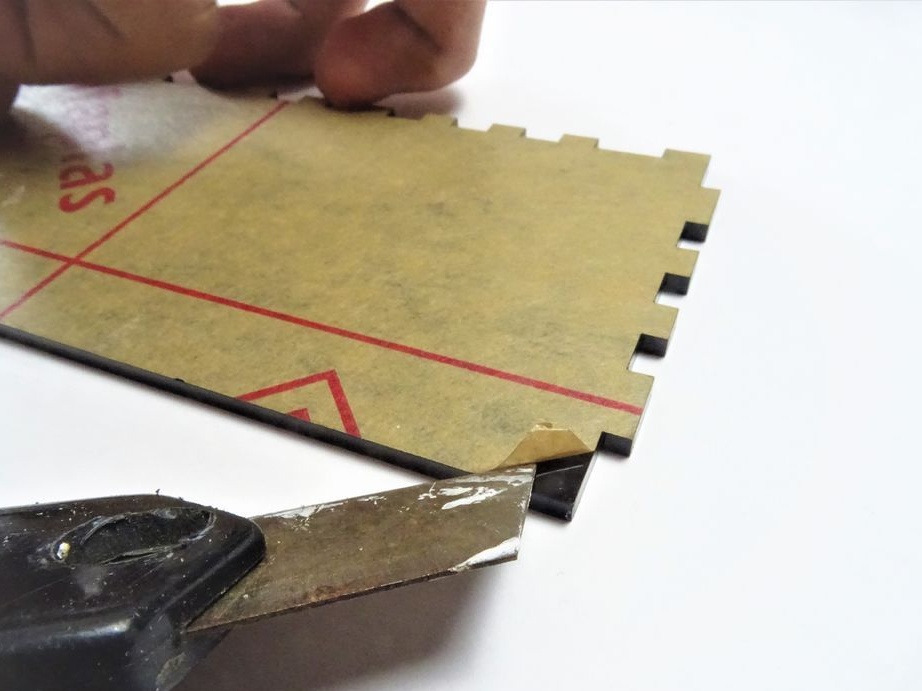
След производството на частите премахва защитния слой от тях.
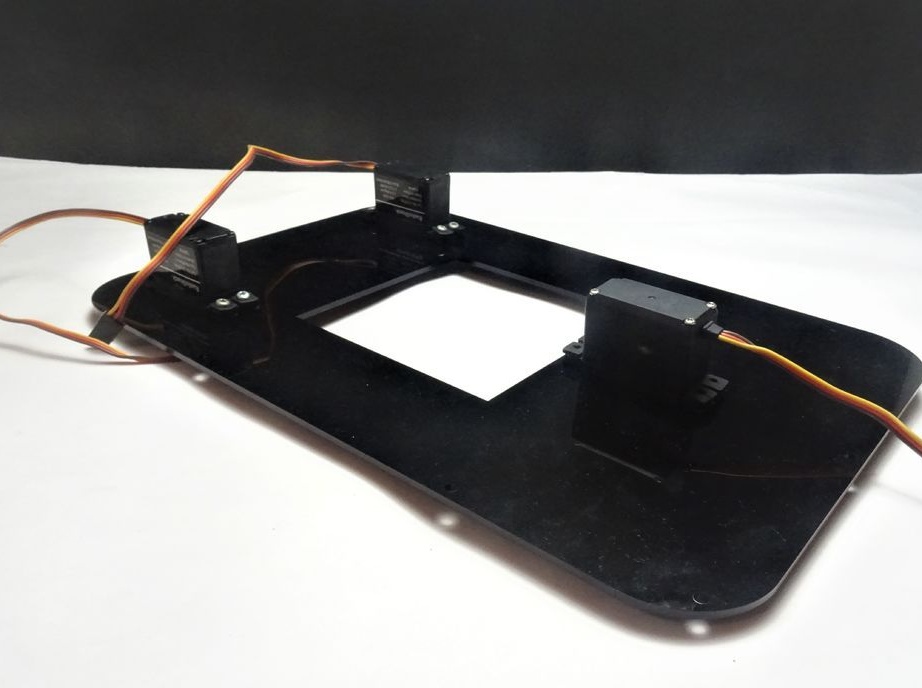
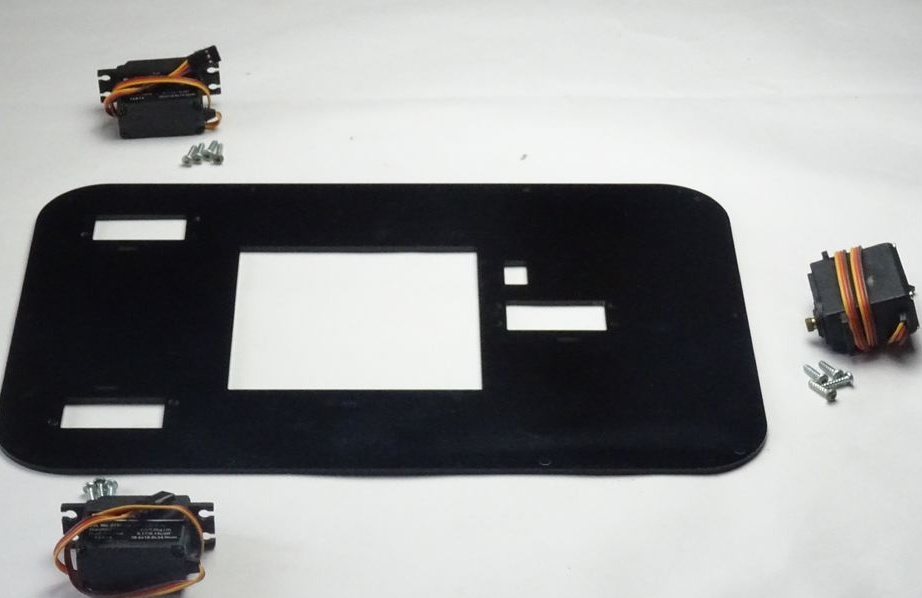
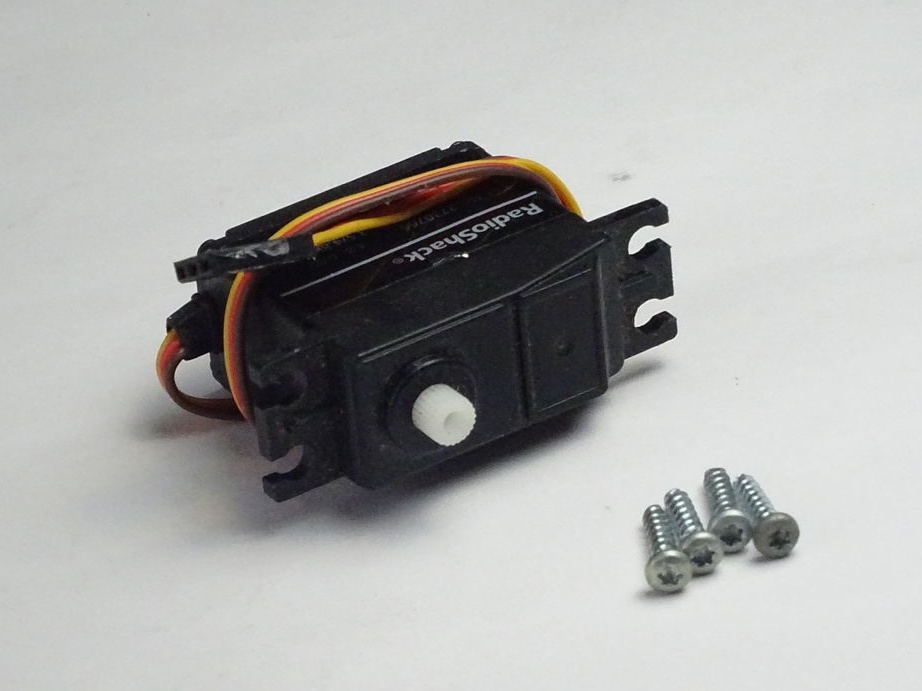
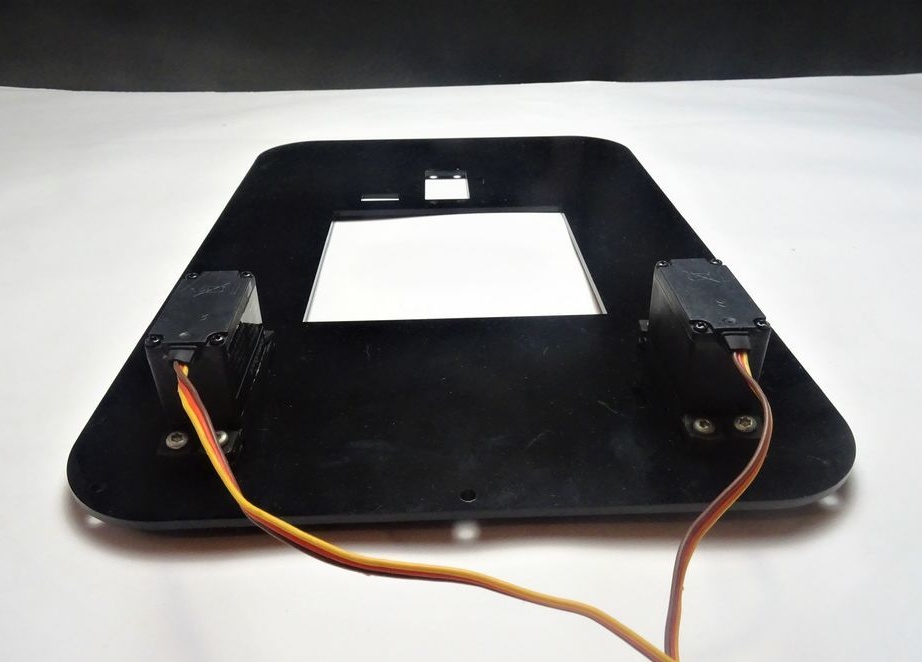
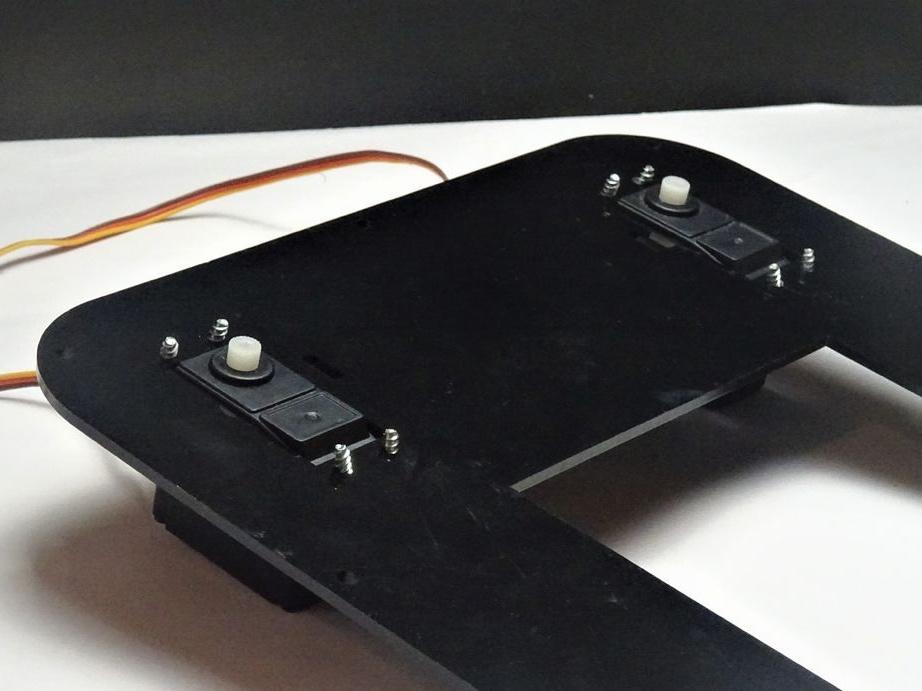
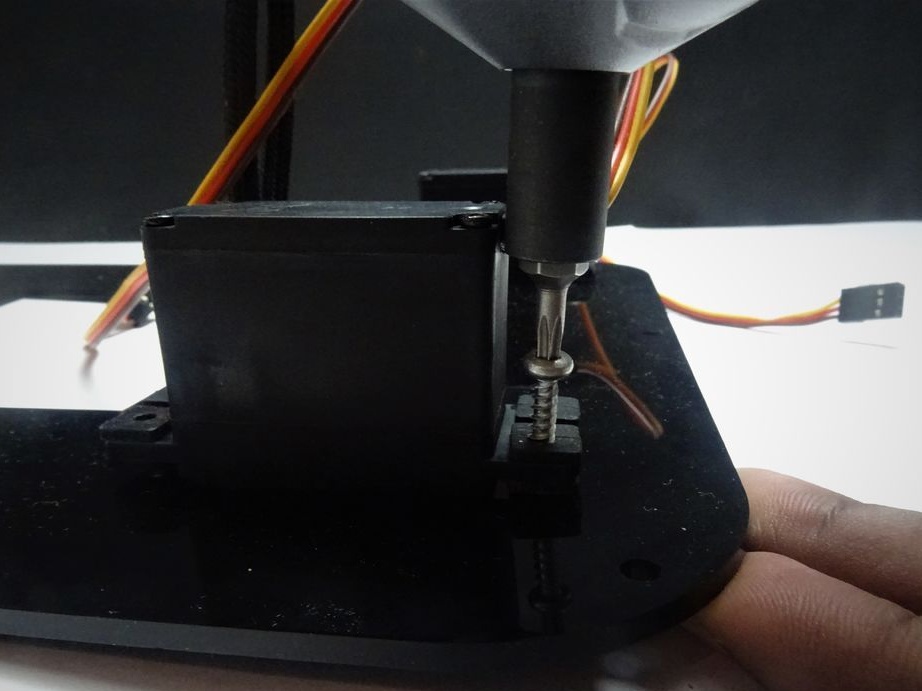
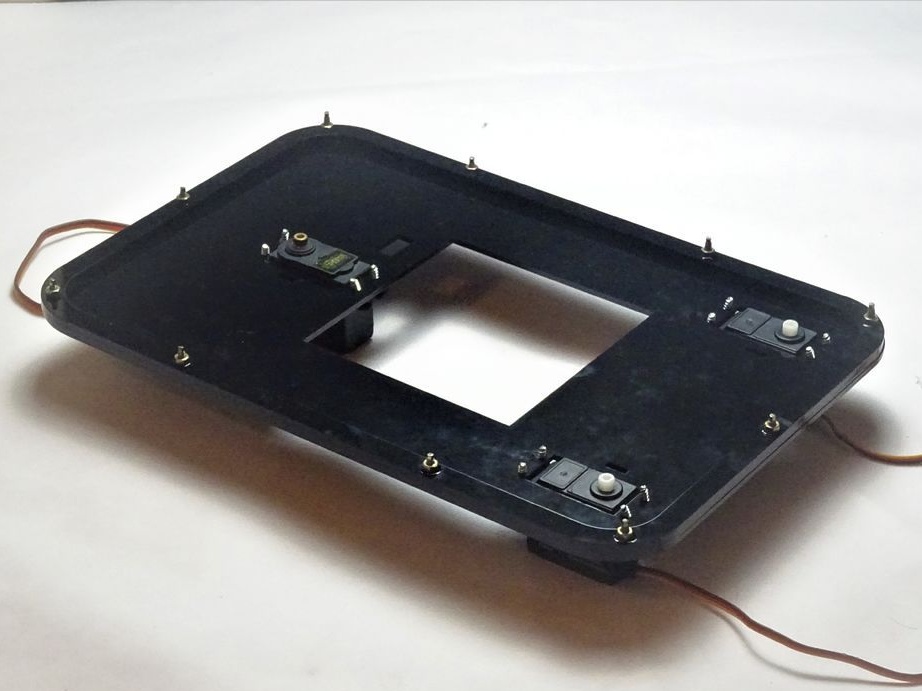
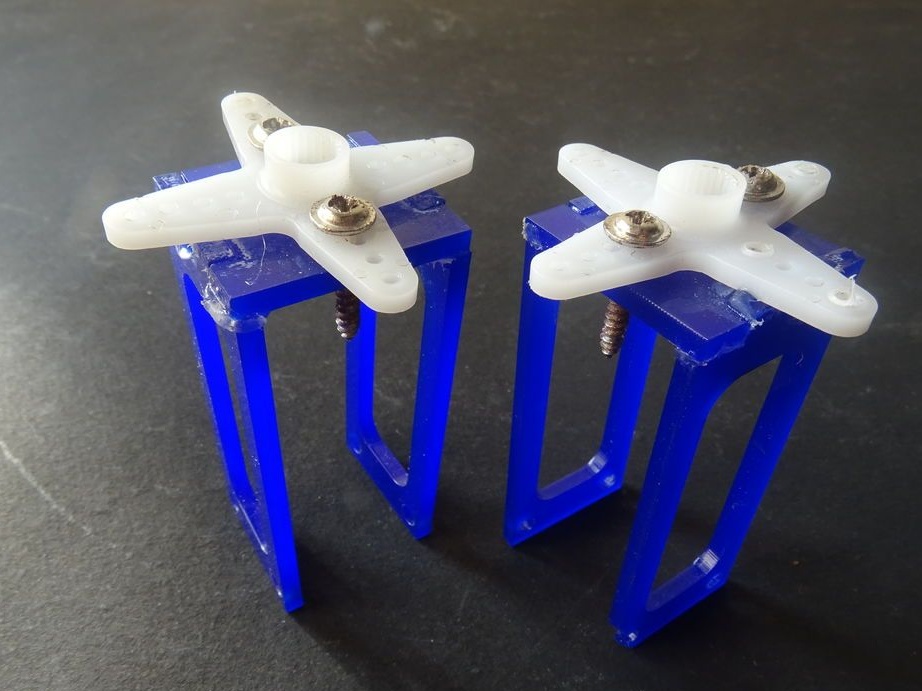
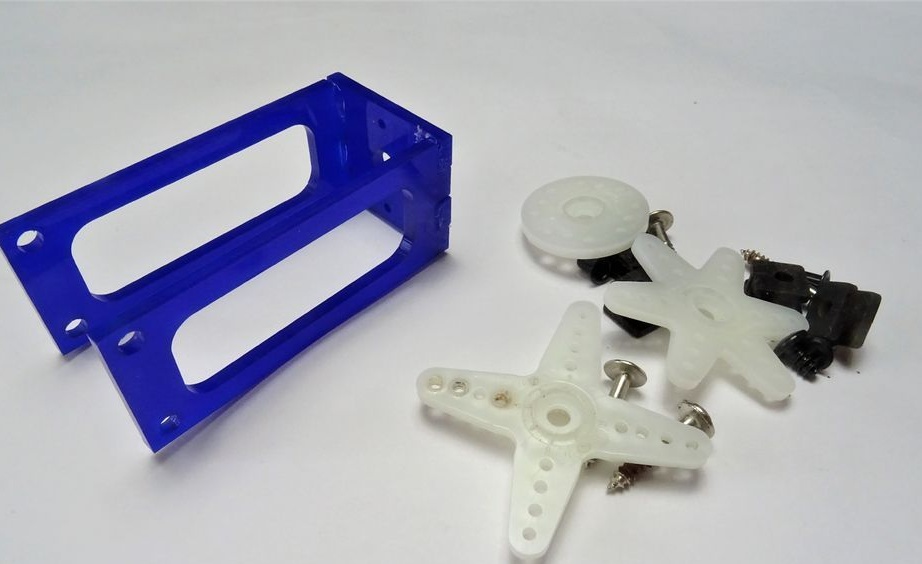
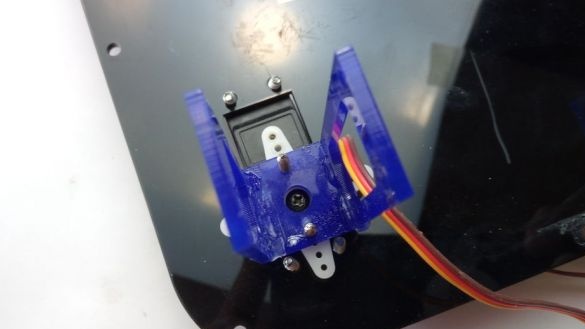
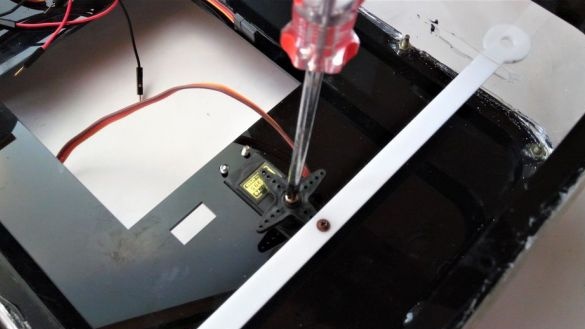
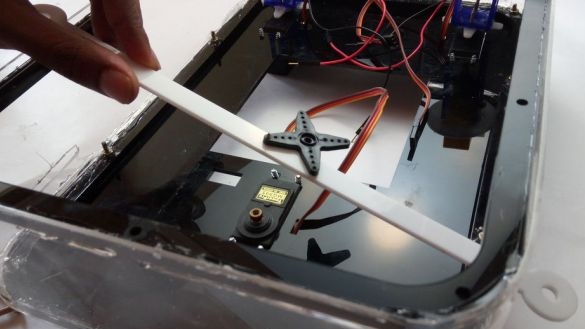
Трета стъпка: Инсталирайте серво мотори
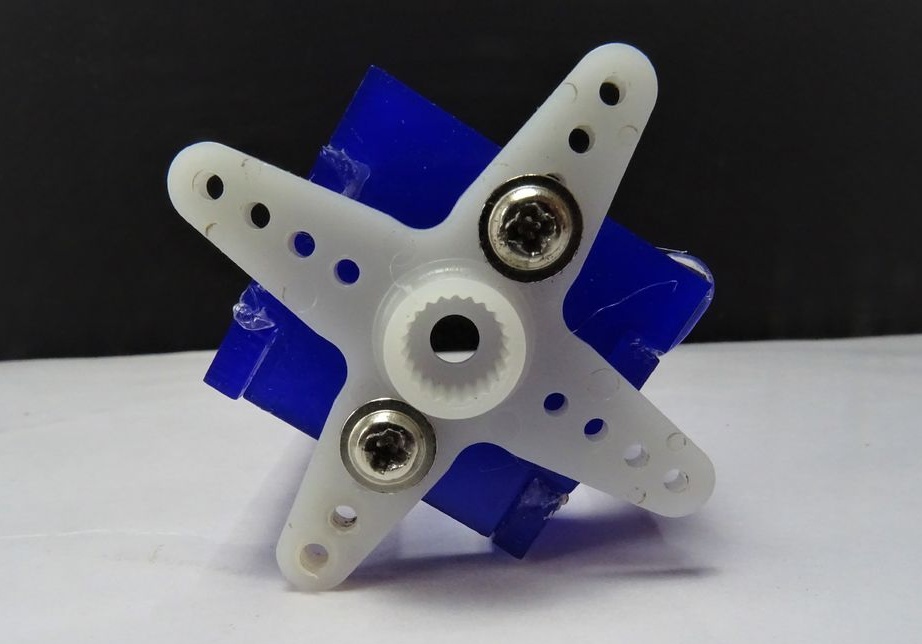
И трите сервомотора са завинтени към платформата. Две отзад и една отпред.
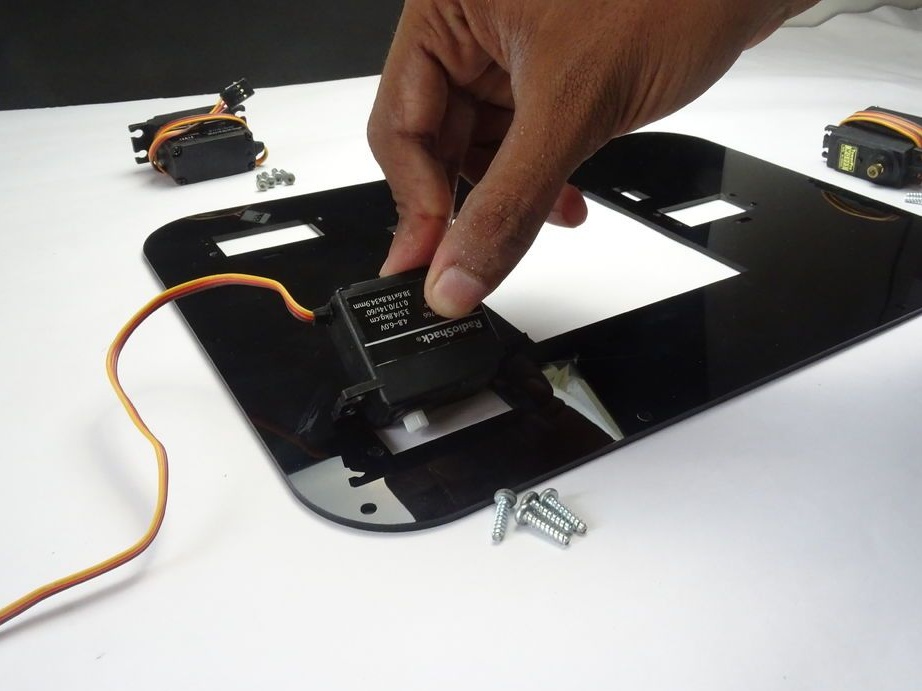

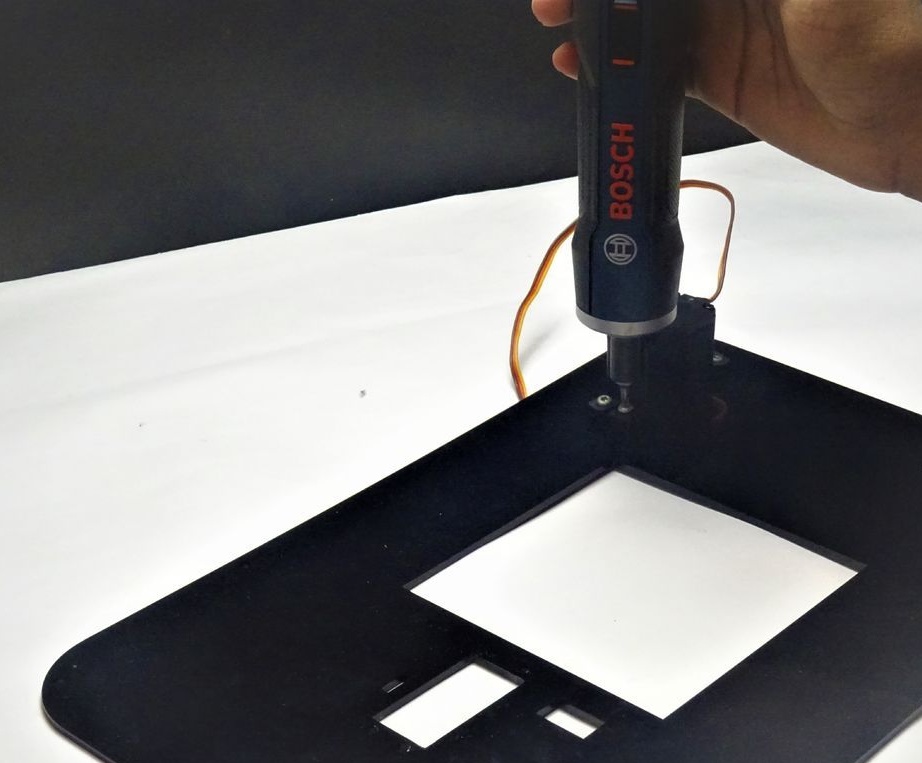
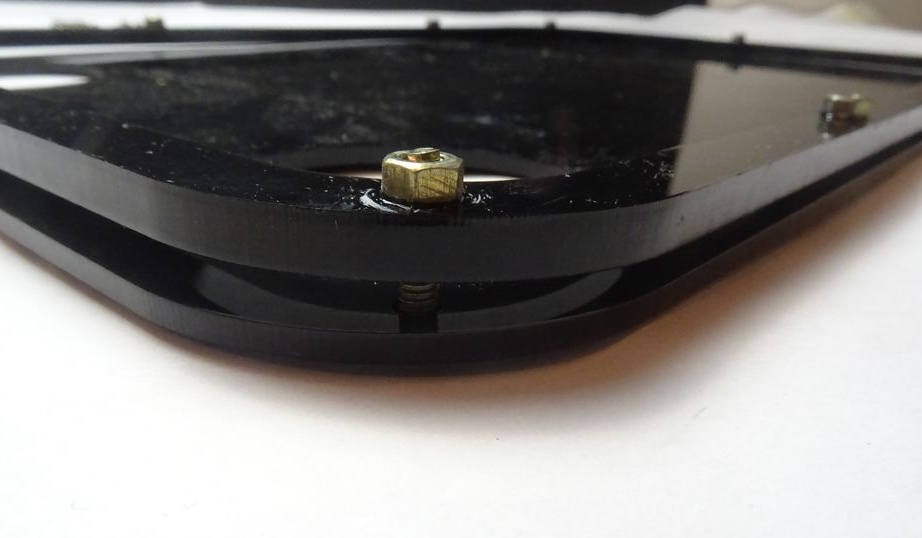
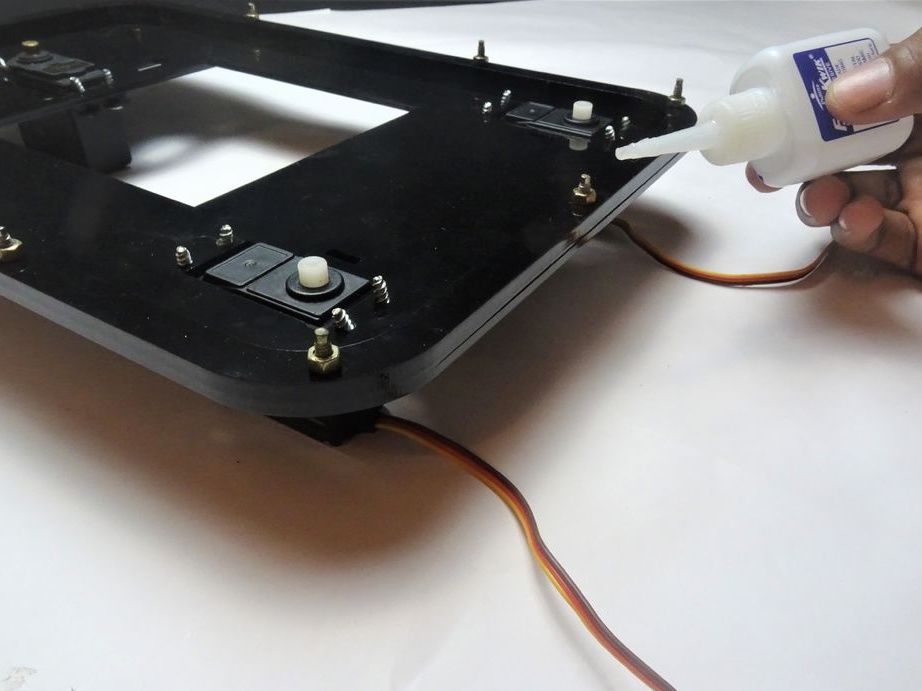
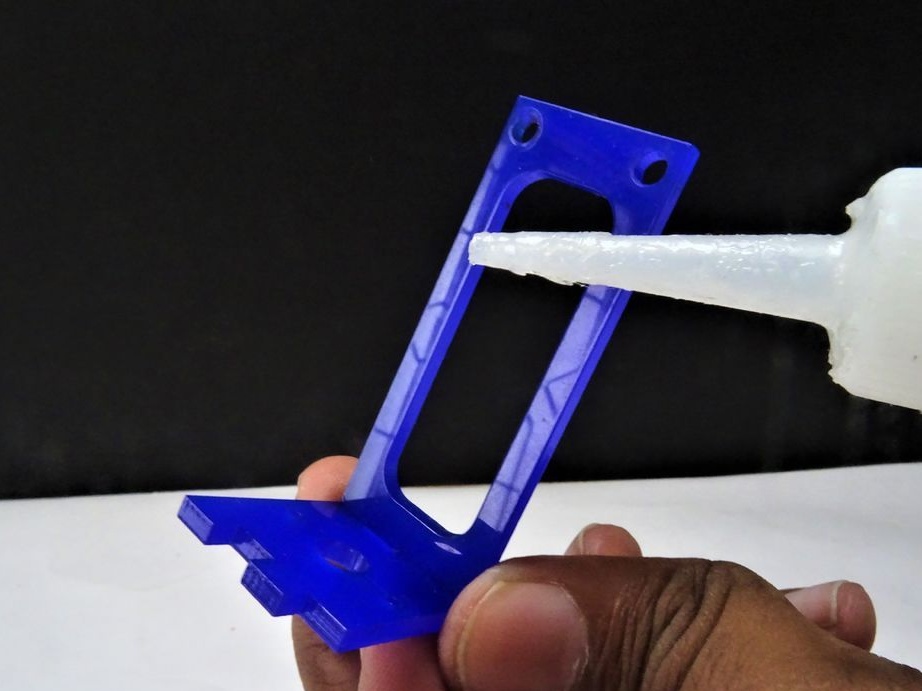
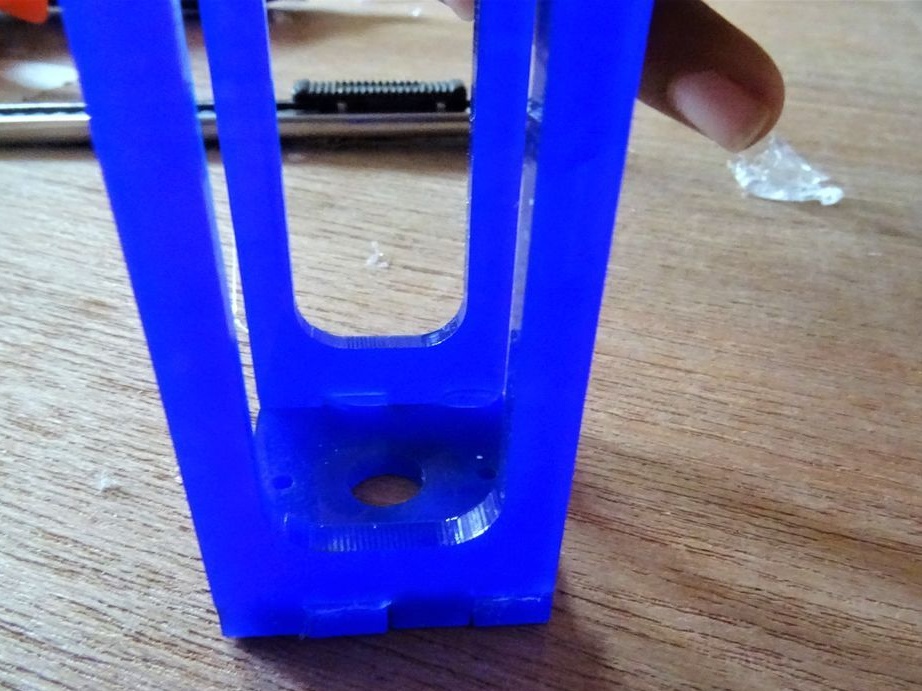
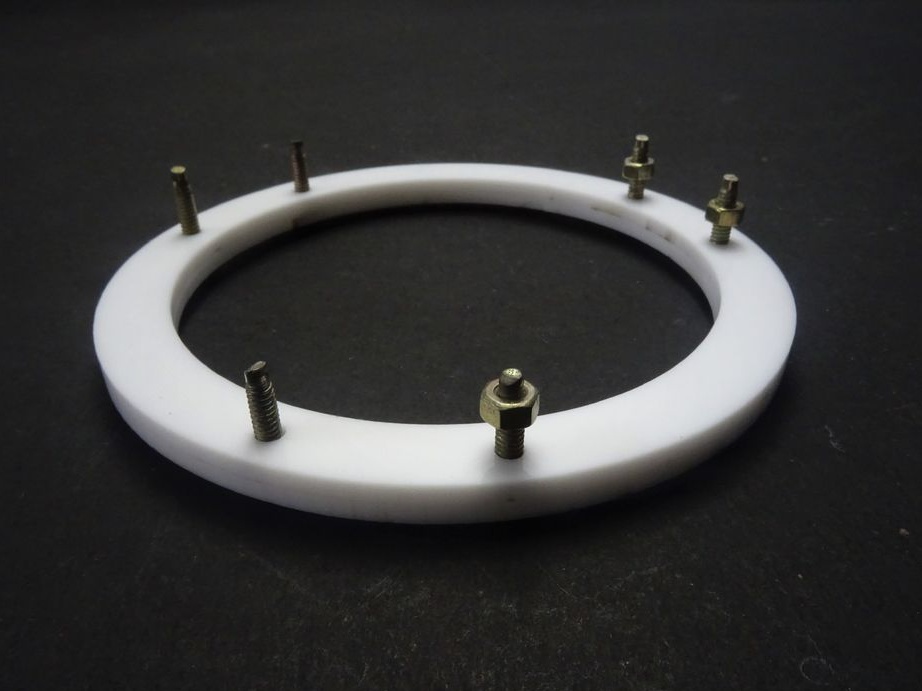
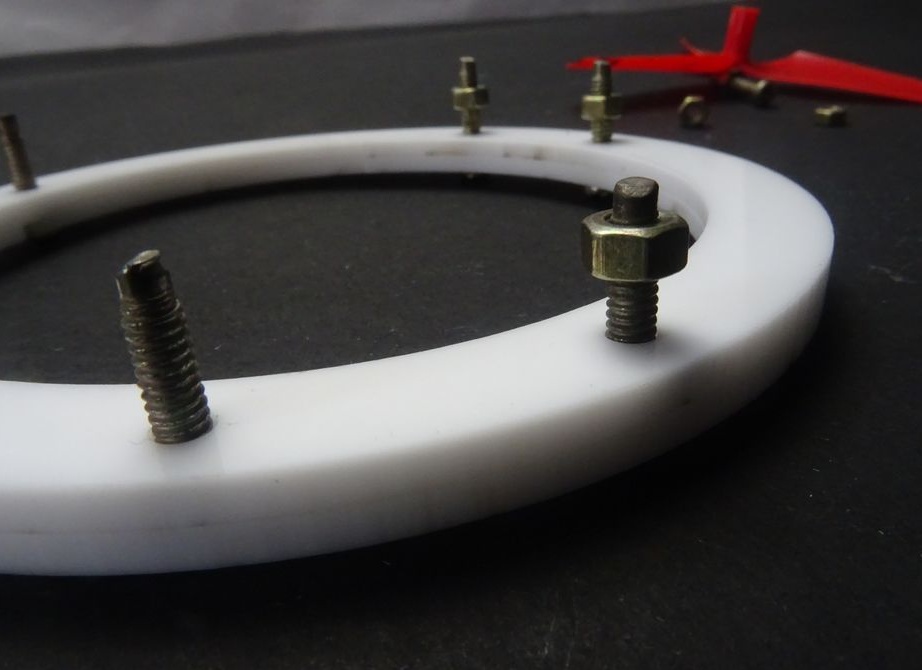
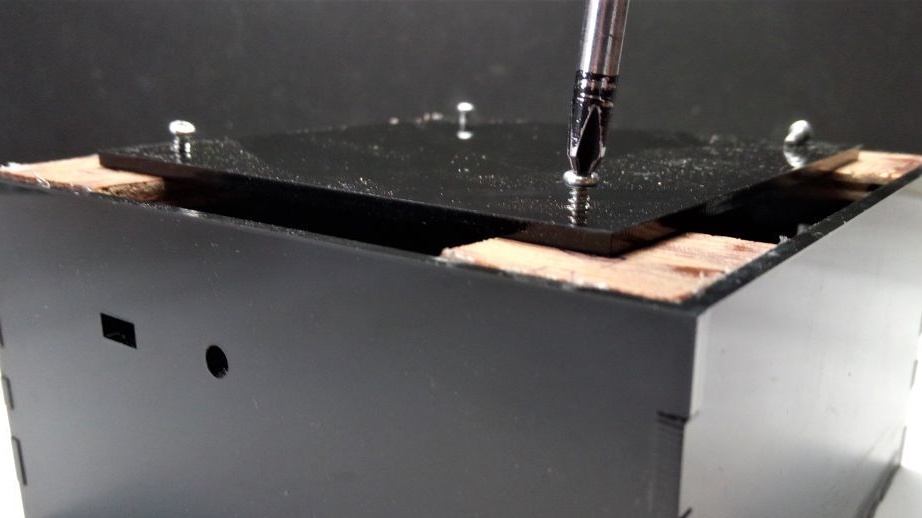
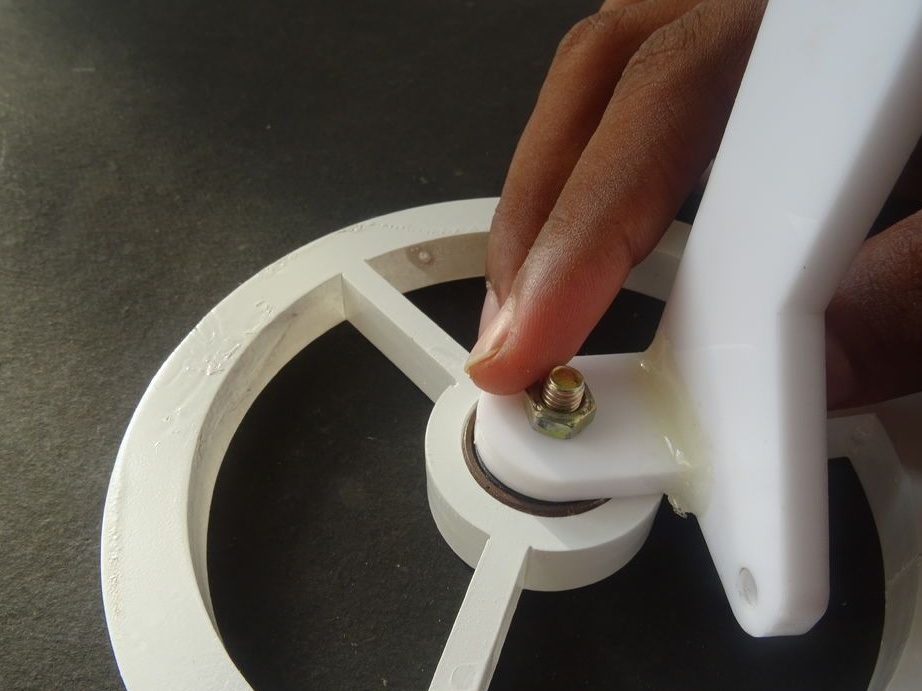
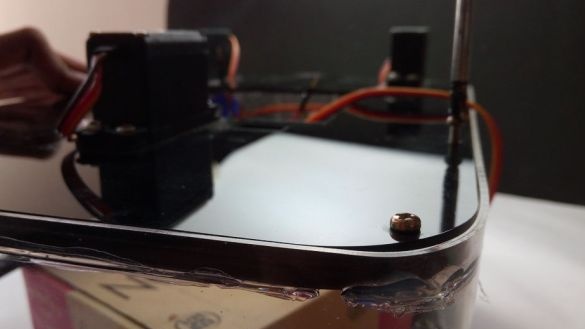
Четвърта стъпка: Ядки
За достъп до механизмите горната и долната част са закрепени заедно с болтове. Залепете гайките върху суперклеянето към рамката и след това я подсилете с епоксид.


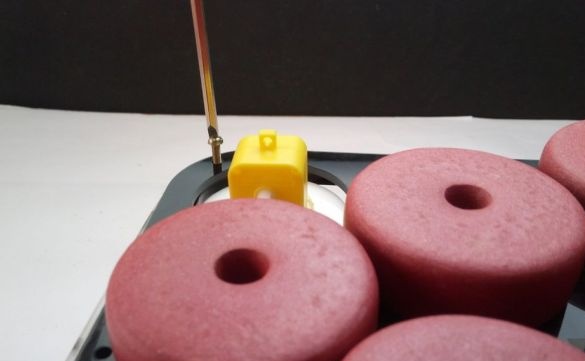
Пета стъпка: плава
Лепилото плава.



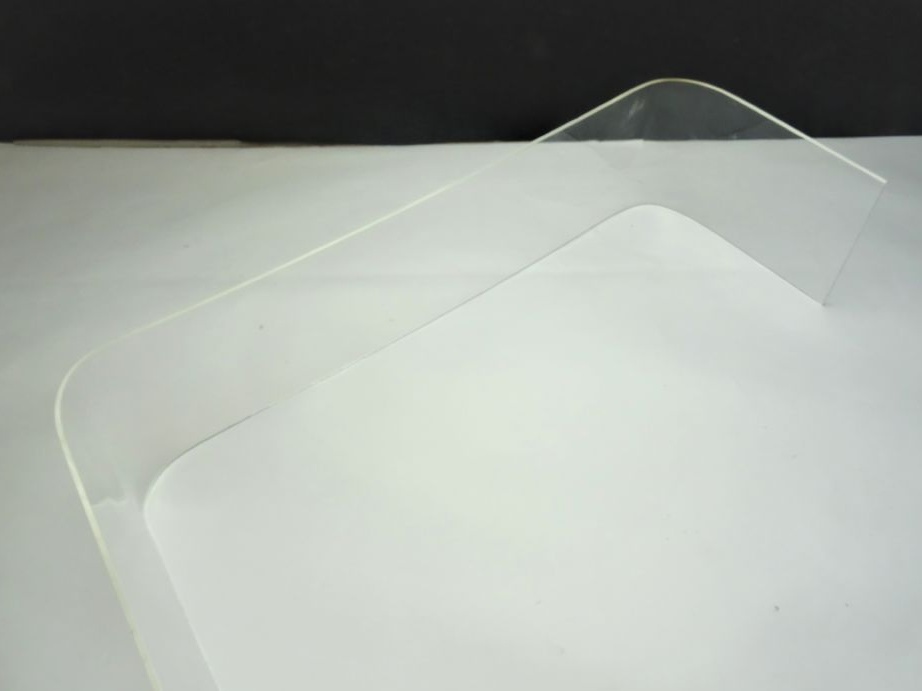
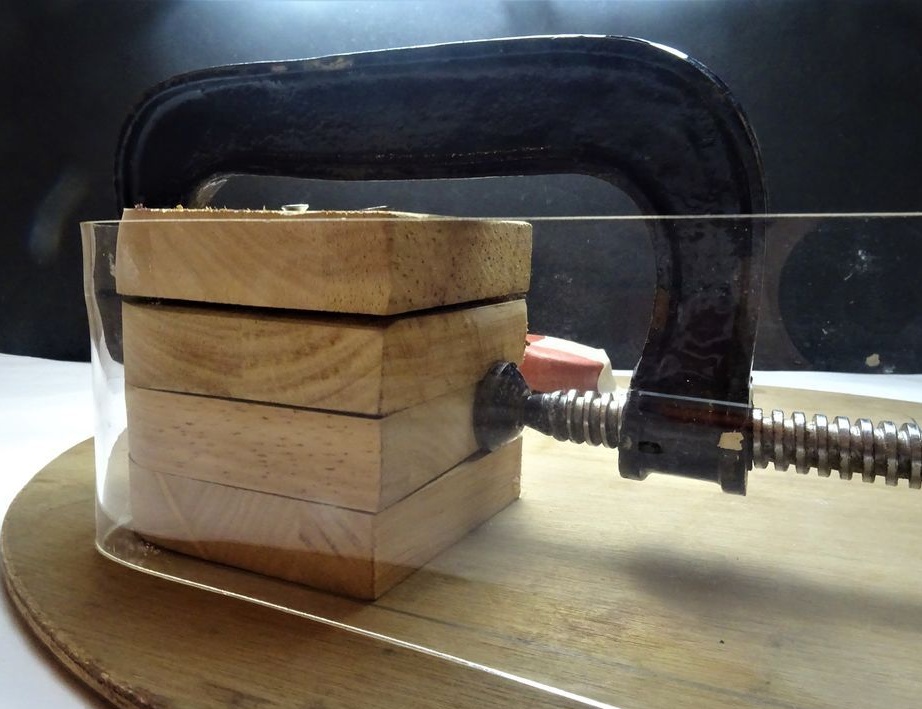
Стъпка шеста: Оформяне на акрил
За да огъне акрил, майстор прави шаблон от дърво.



Той захваща частта със скоба и, нагрявайки я със сешоар, придава на частта желаната форма.





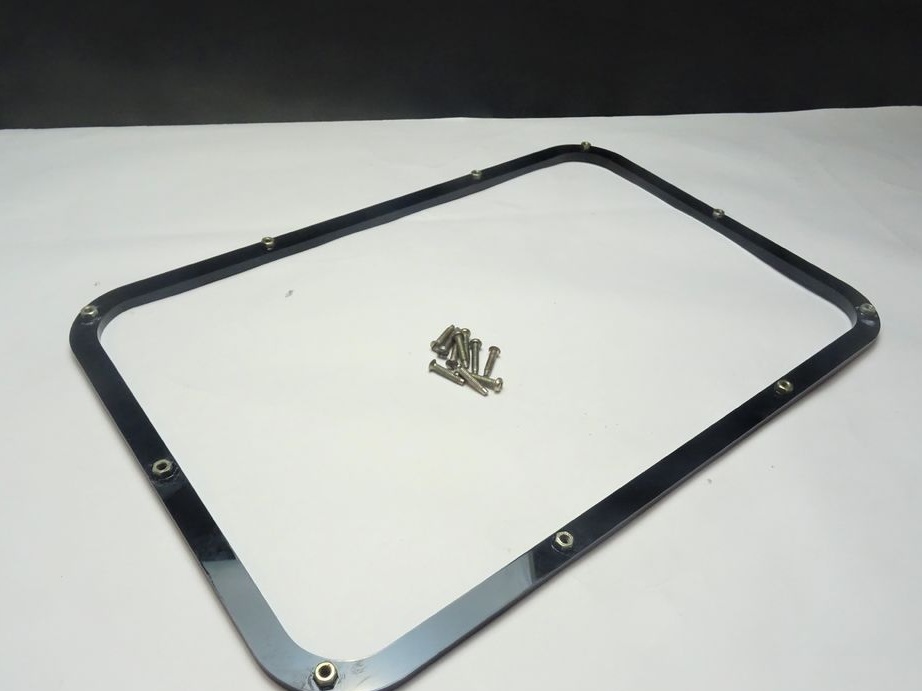
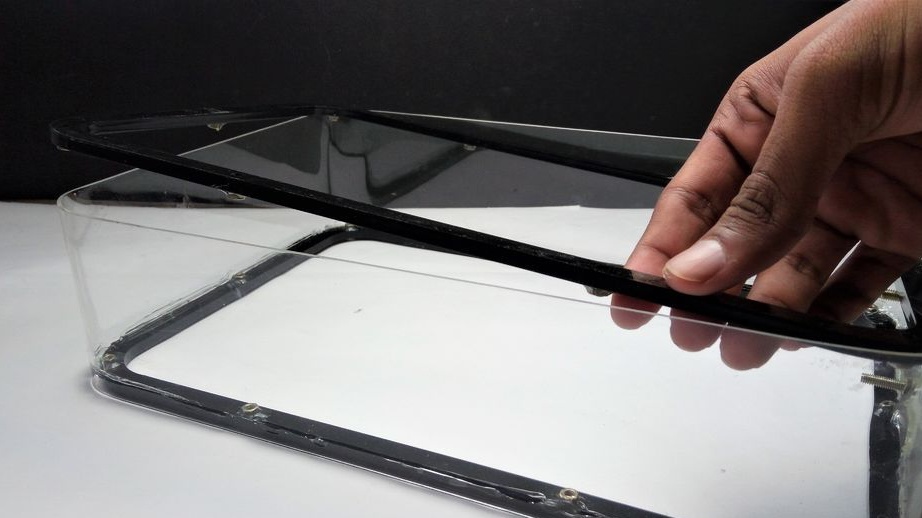
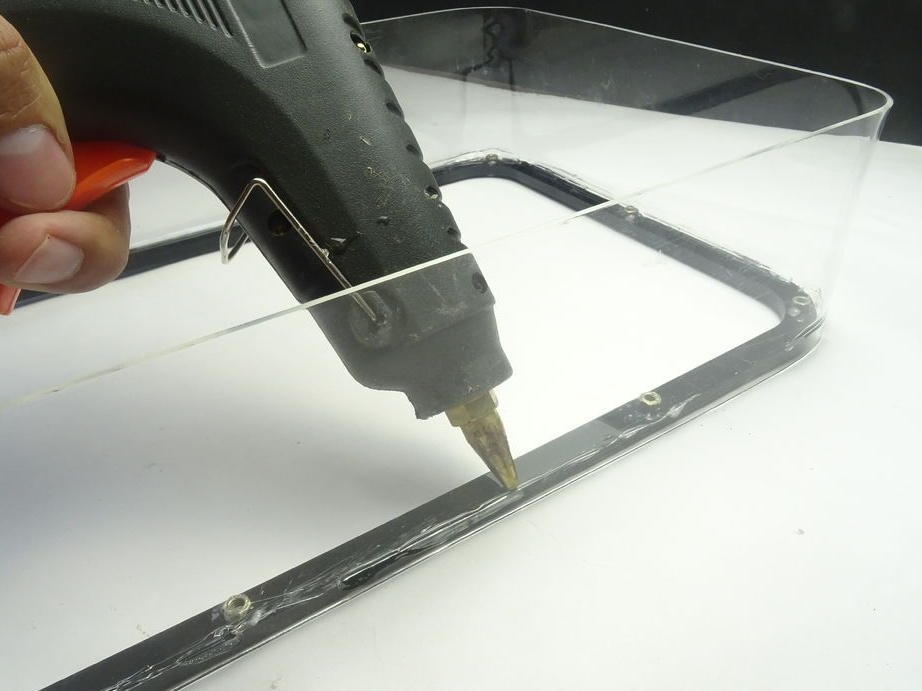
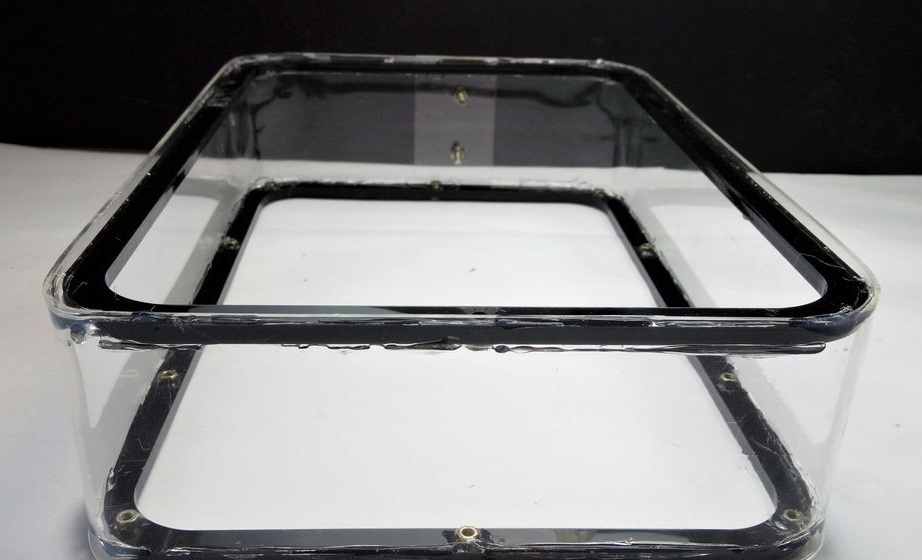
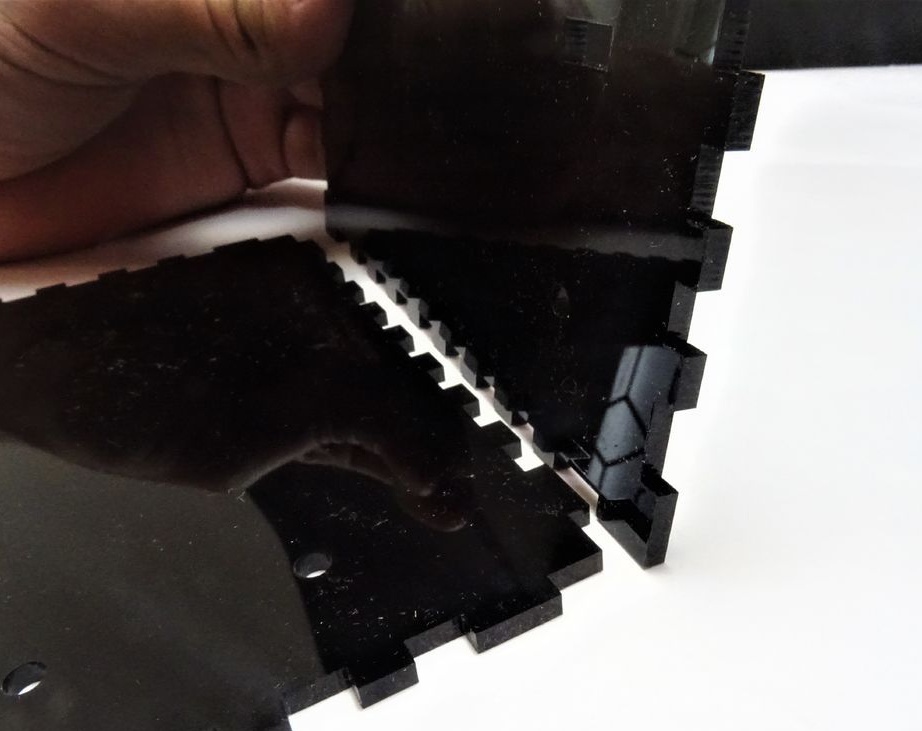
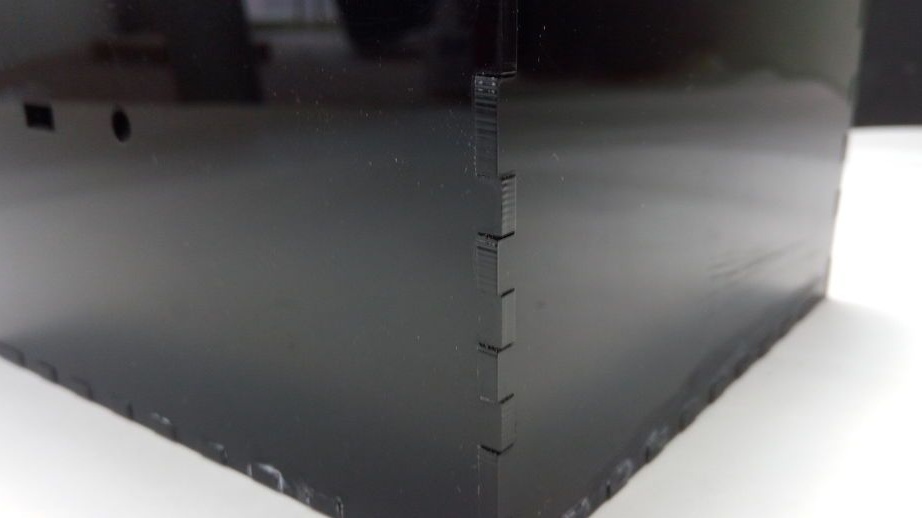
Седма стъпка: рамка
Залепва горната и долната рамка към прозрачното тяло. Шевовете са внимателно запечатани с горещо лепило.







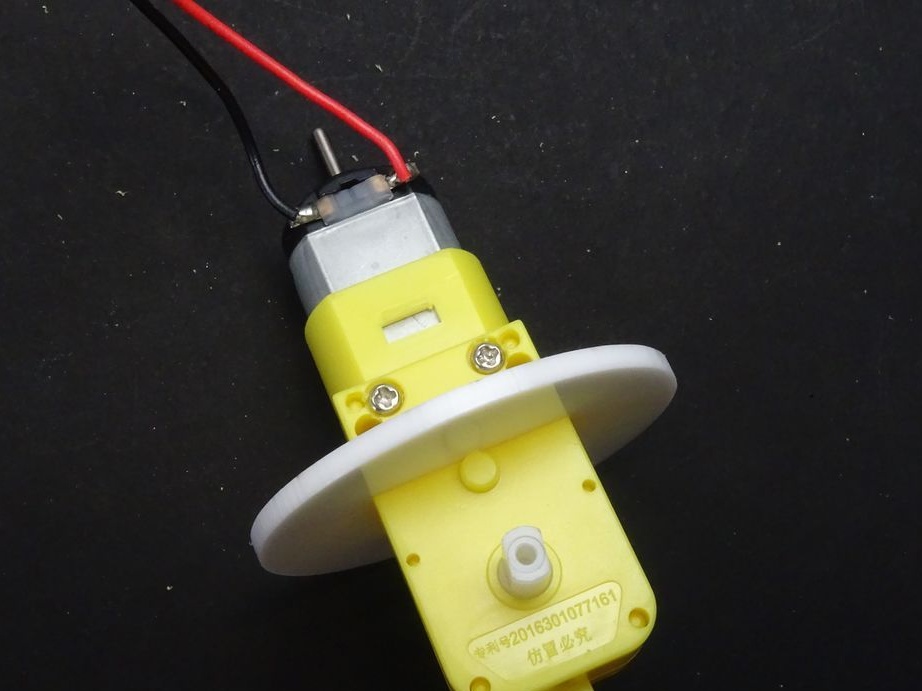
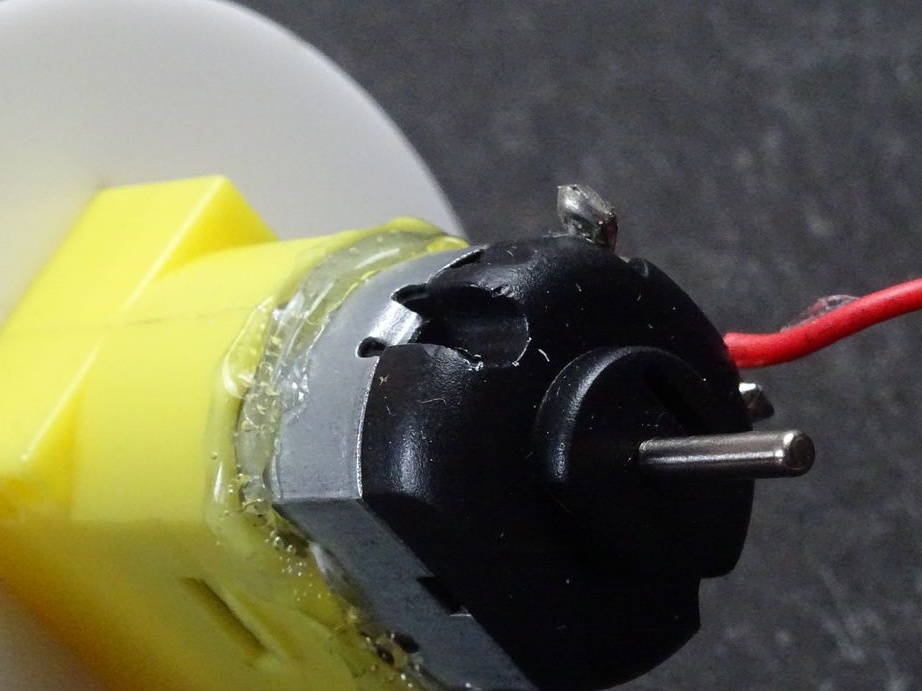
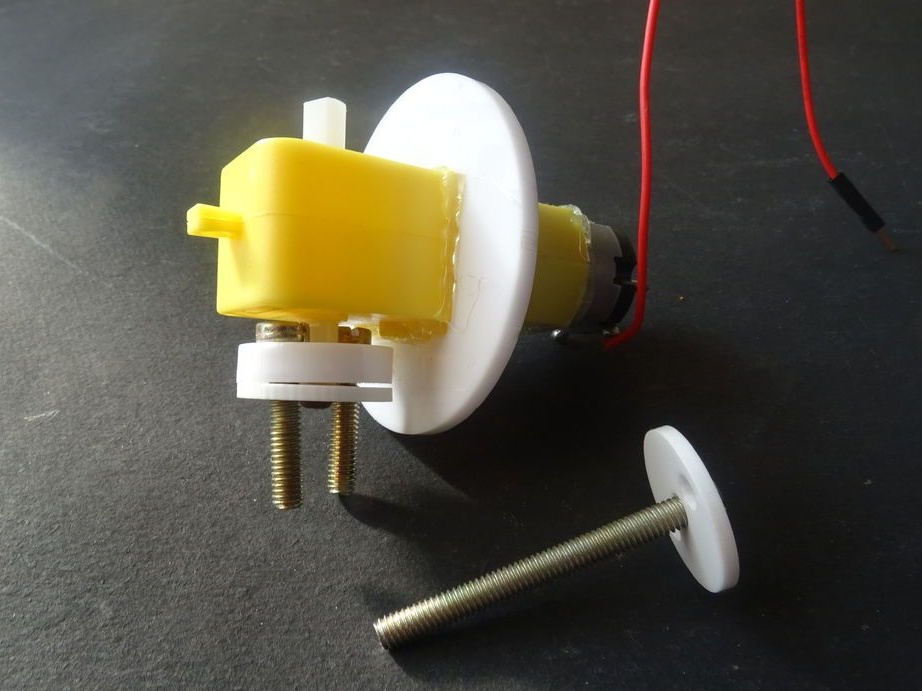
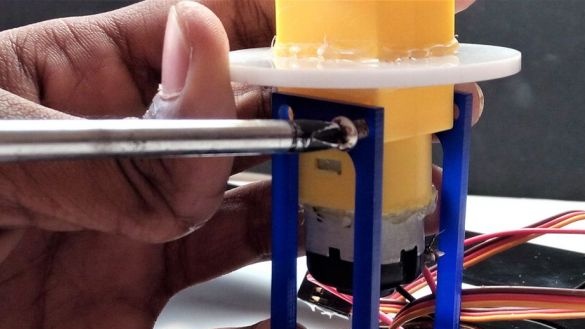
Стъпка осма: Настройка на двигателя
Сега трябва да обработите корпуса на двигателя, за да инсталирате части върху него.
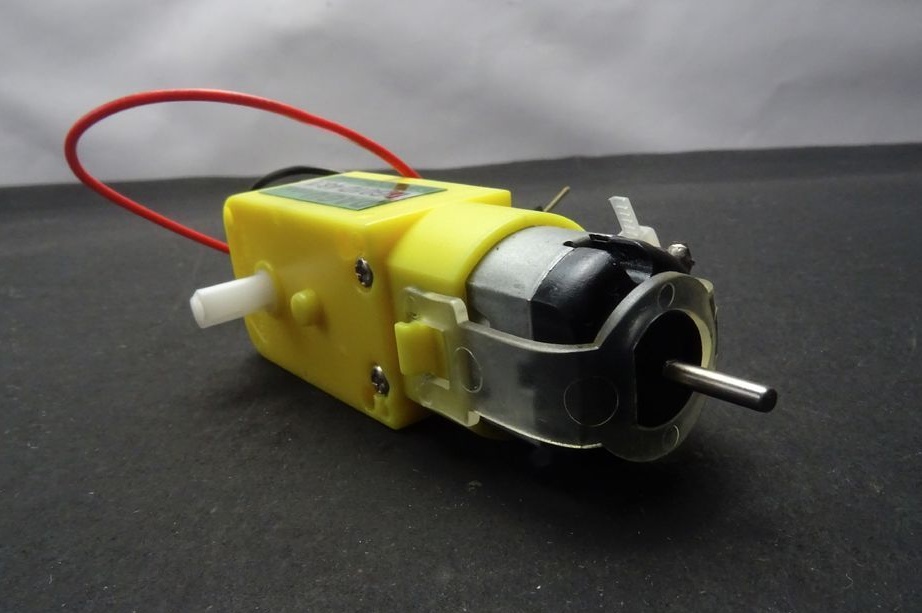
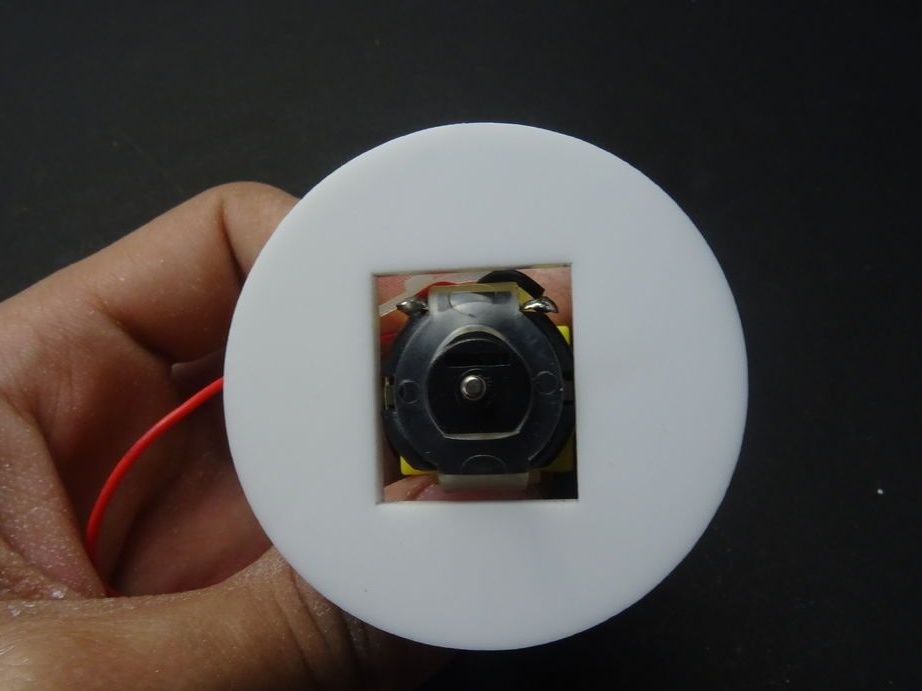
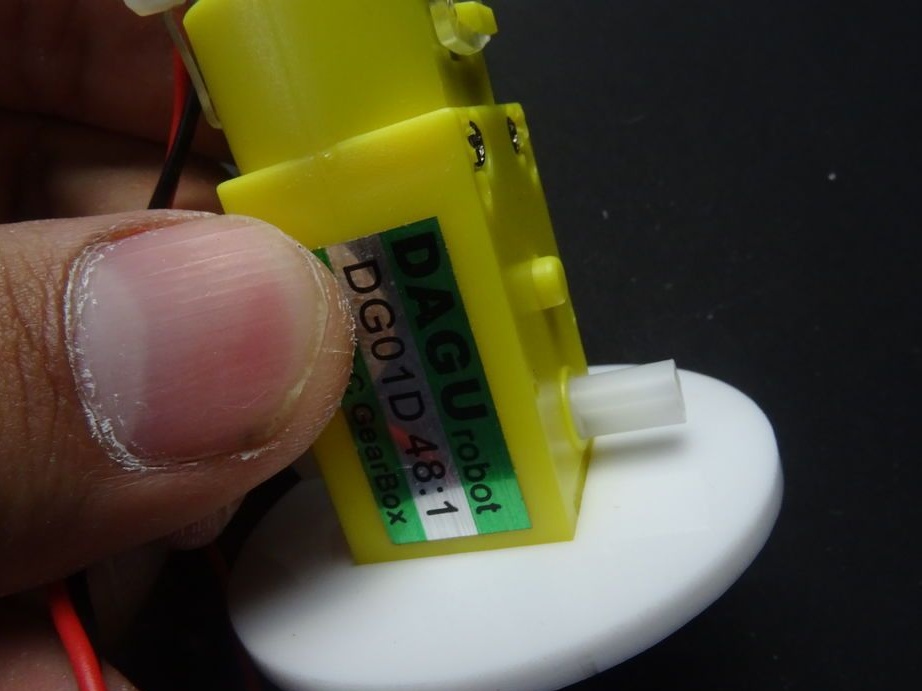

Изрязва всички стърчащи части от тялото, до стикера.
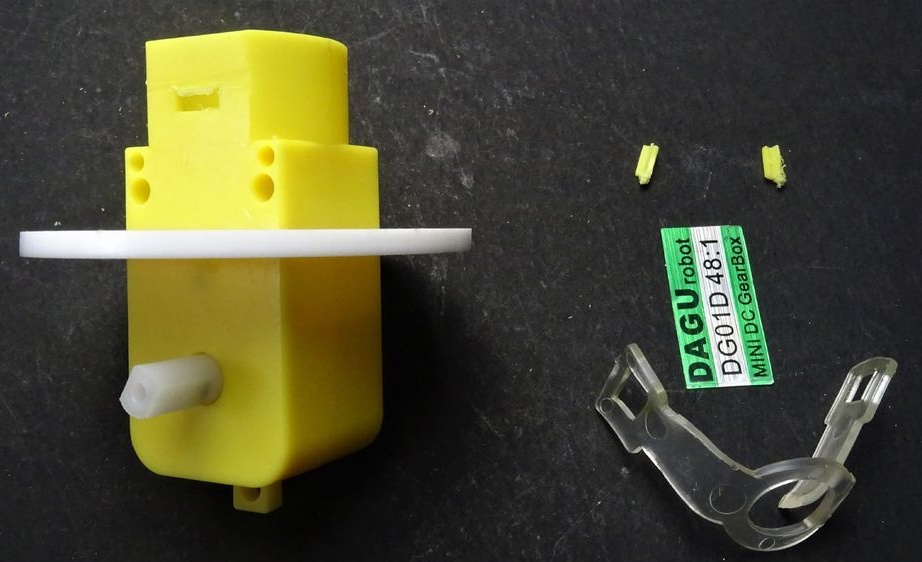

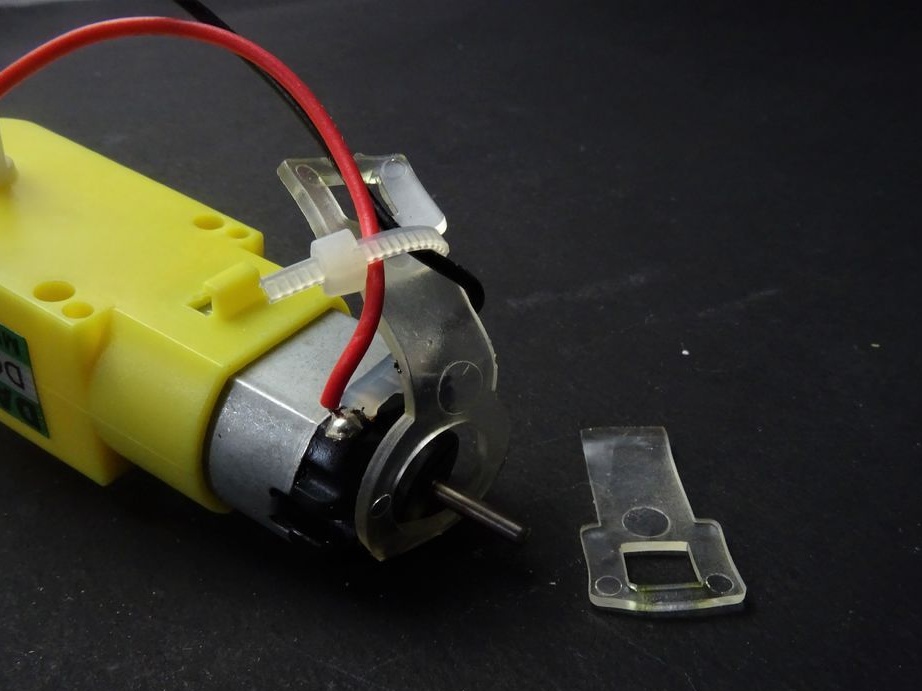
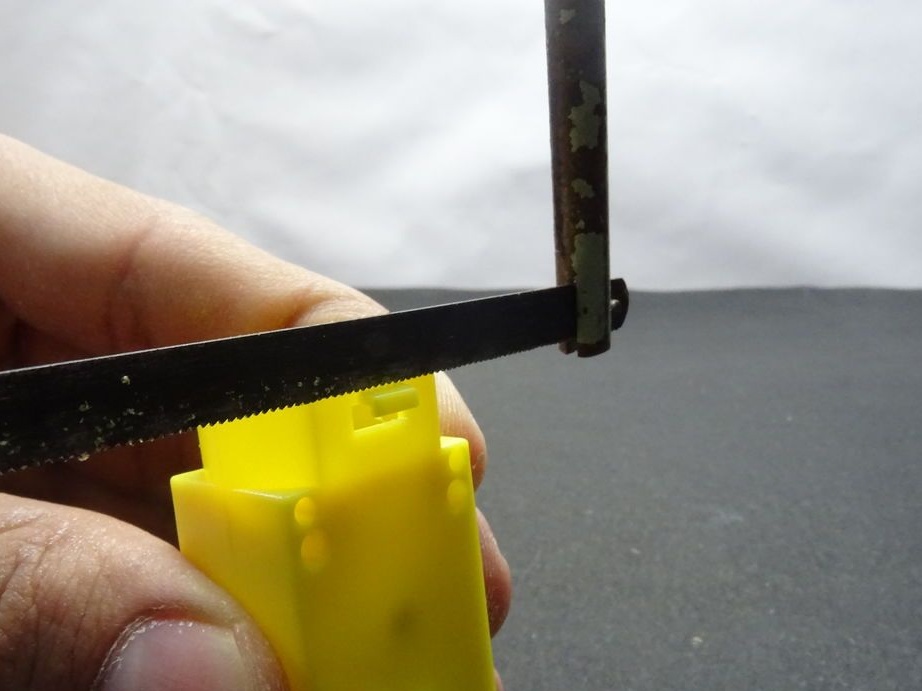


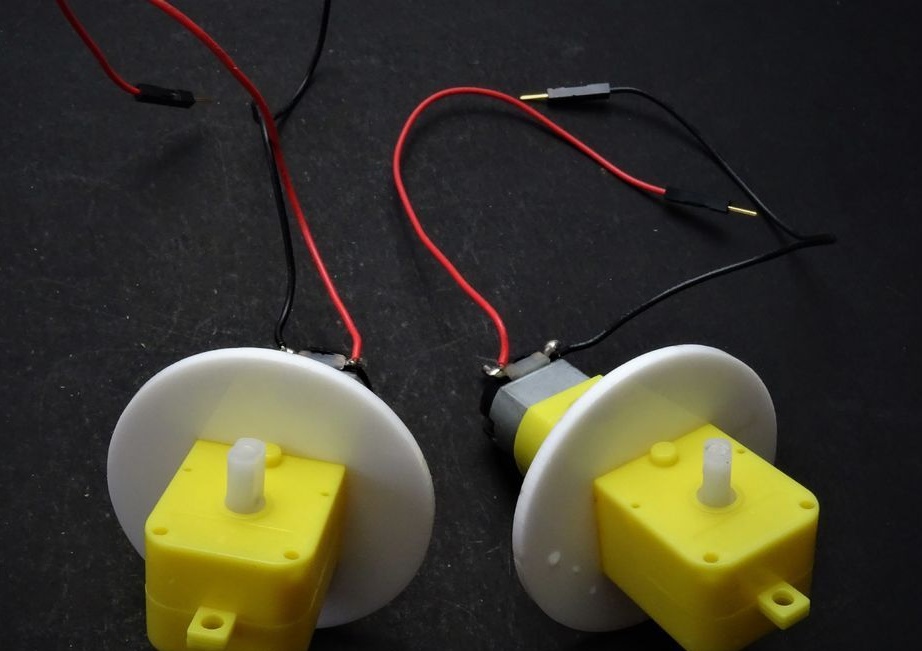
Инсталира частта върху тялото и я залепва. Тъй като беше необходимо да се отреже монтажа на двигателя (ключалки), двигателят също се фиксира с лепило.


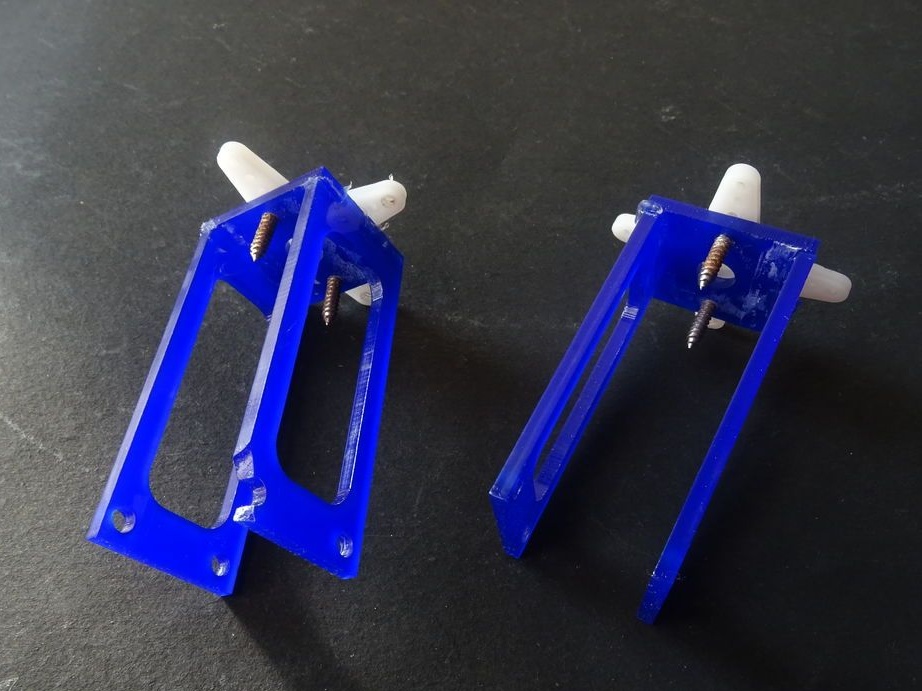
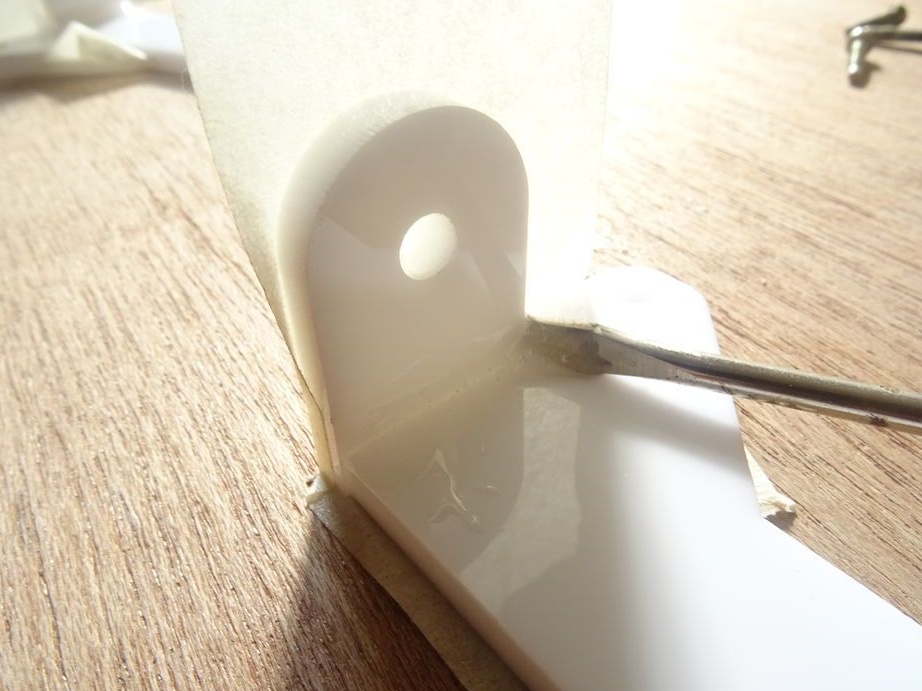
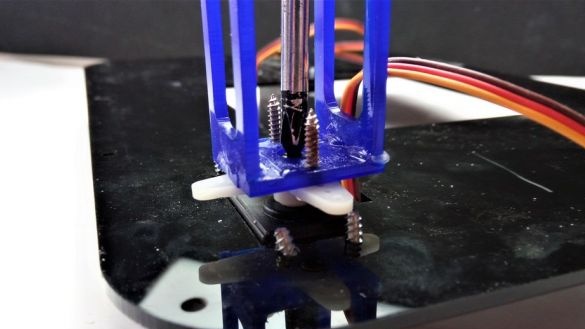
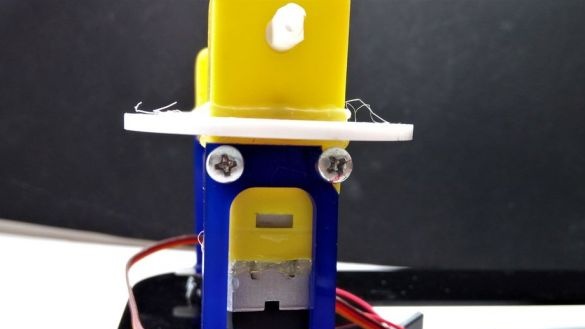
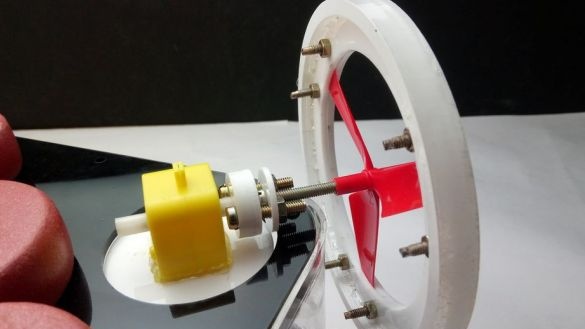
Стъпка девета: Механизъм за завъртане
Сглобява въртящ се корпус. В него ще бъде инсталиран двигател и той ще се свърже със серво задвижването.
Залепва случая.

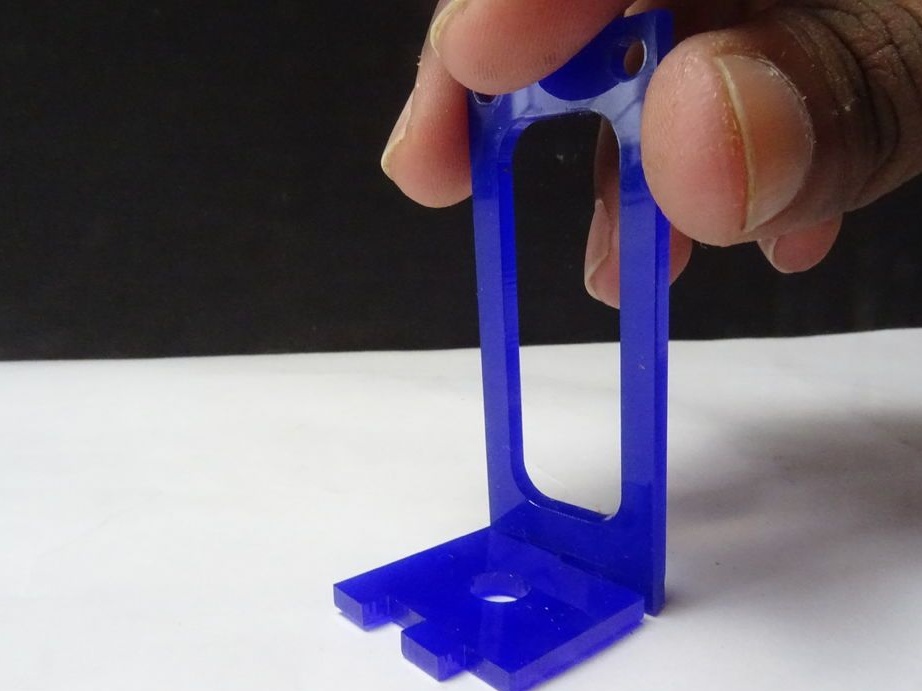

Винтове на съединителя.


Стъпка десета: Живопис
Тъй като майсторът нямаше бял акрил с необходимата дебелина, колелата и джантата бяха изрязани от прозрачен акрил и след това боядисани в бяло.




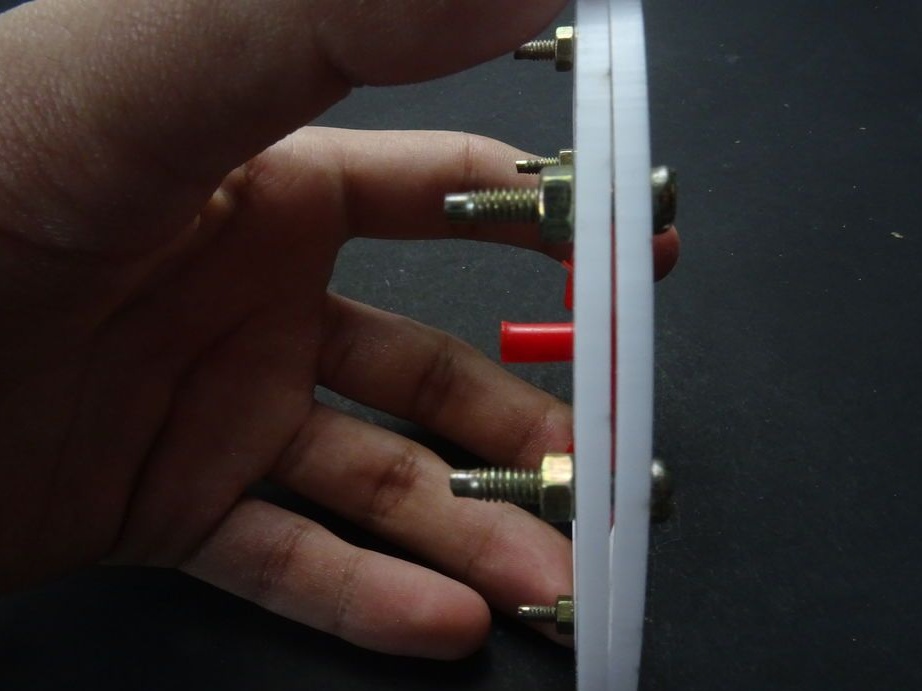
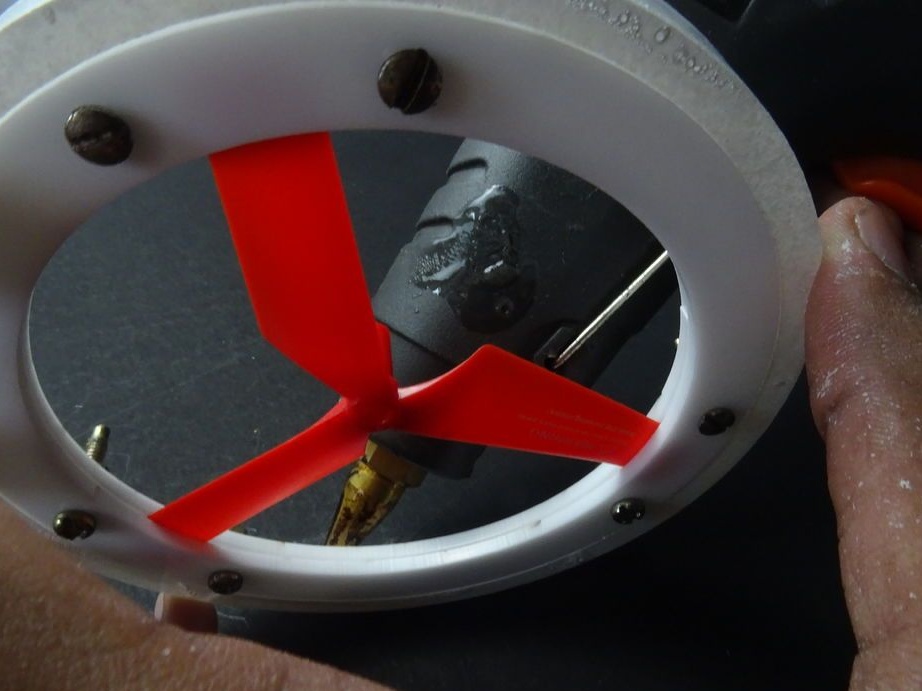
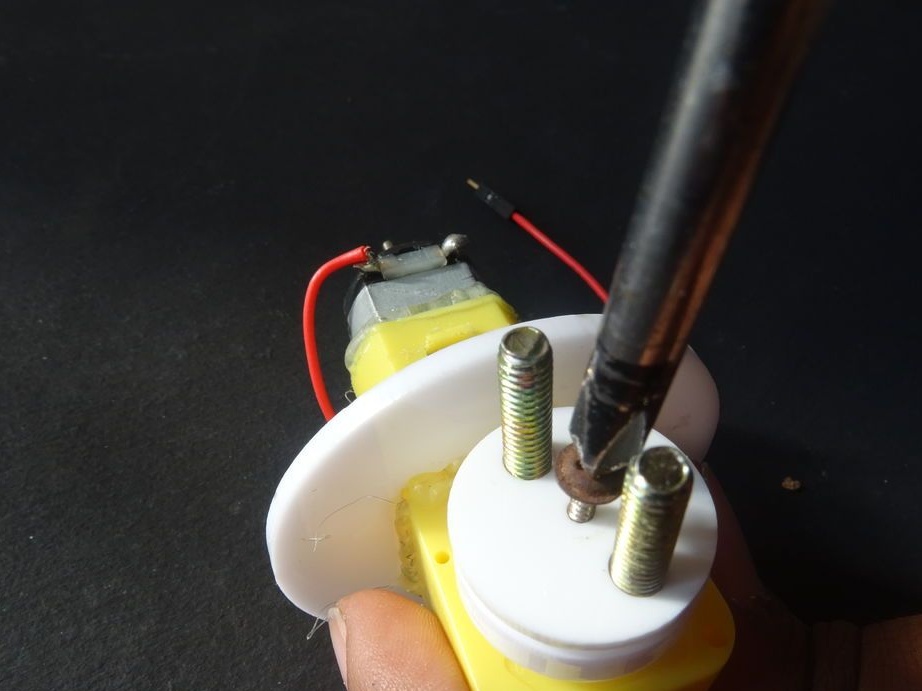
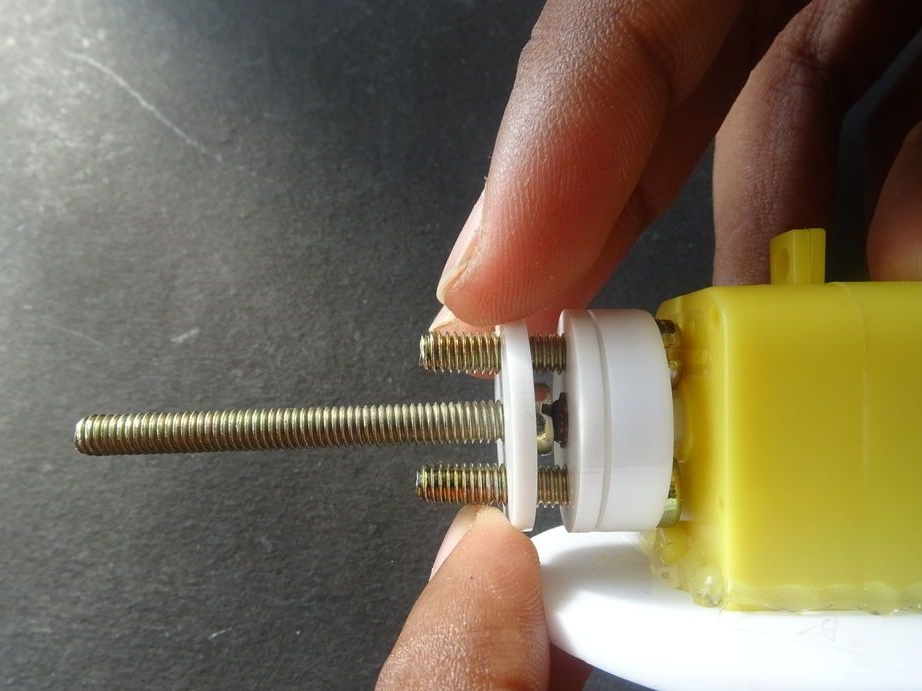
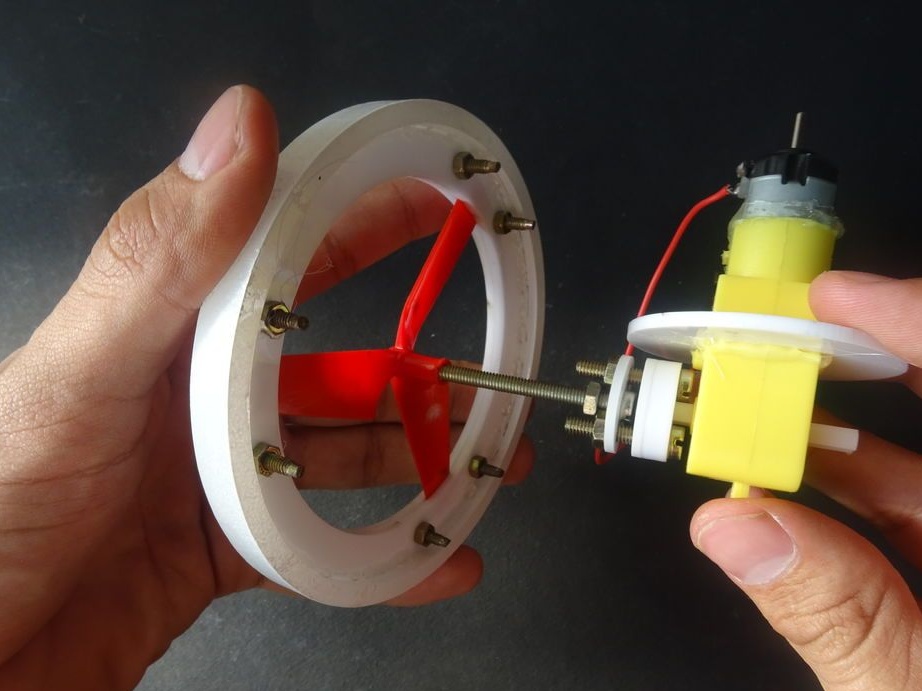
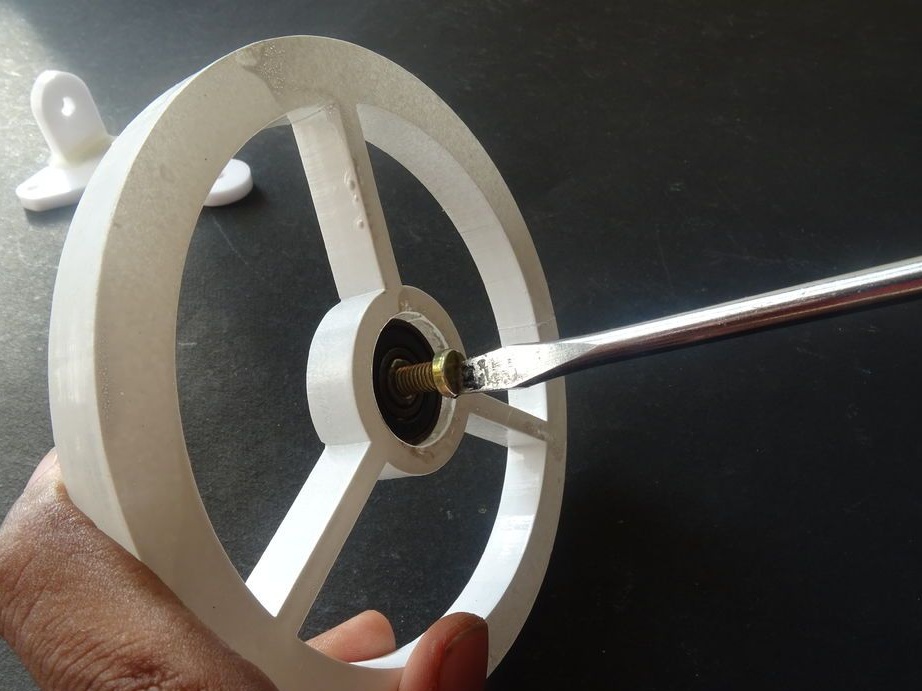
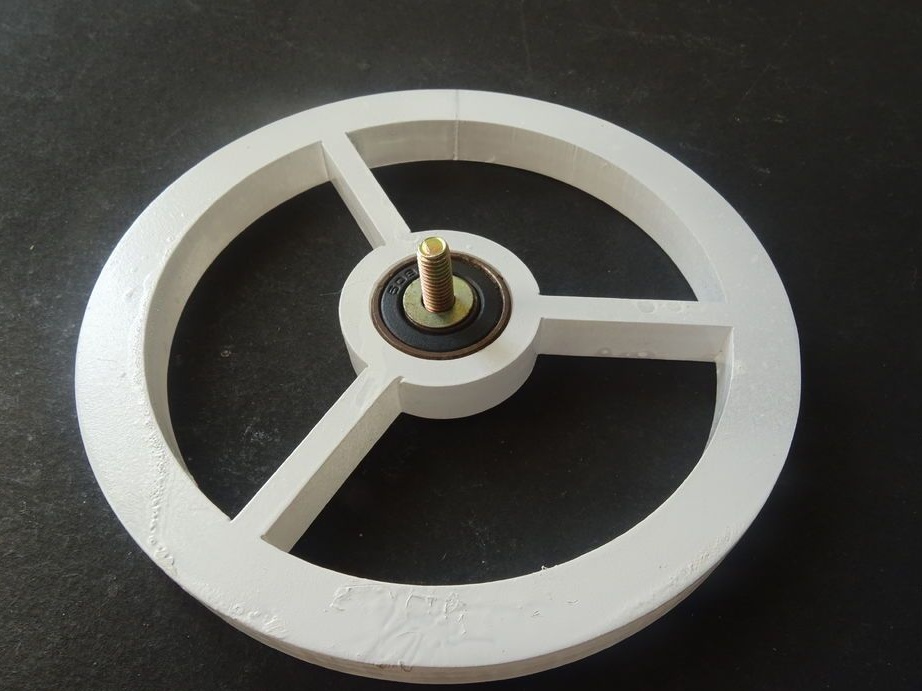
Единадесета стъпка: сглобяване на колела
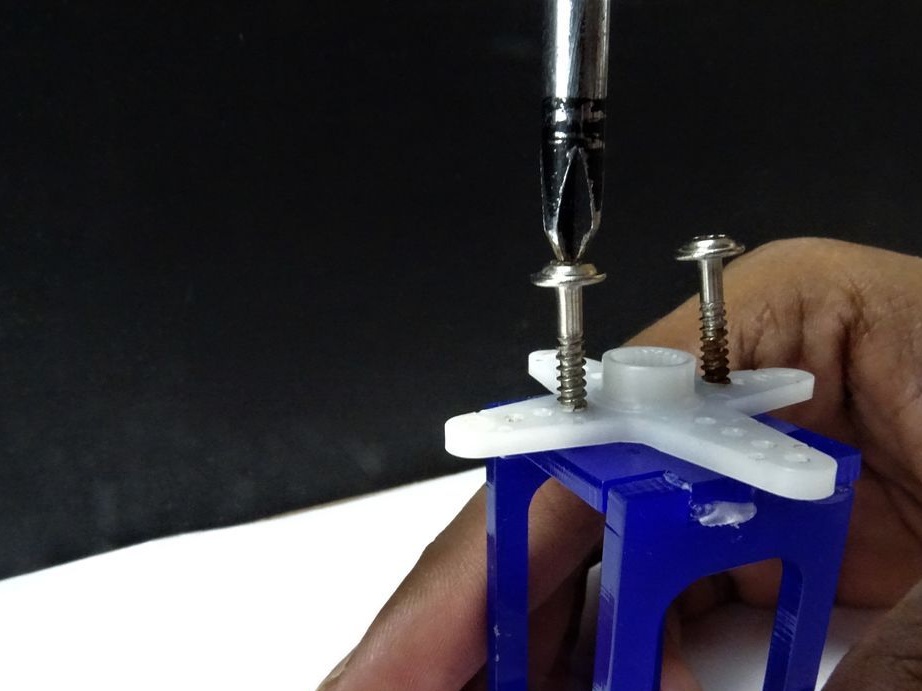
На болтове събира две джанти. Винтовете не са напълно затегнати.




Между дисковете инсталира винтове и затяга винтовете. Когато инсталирате винта, трябва да използвате шаблона, за да го центрирате.
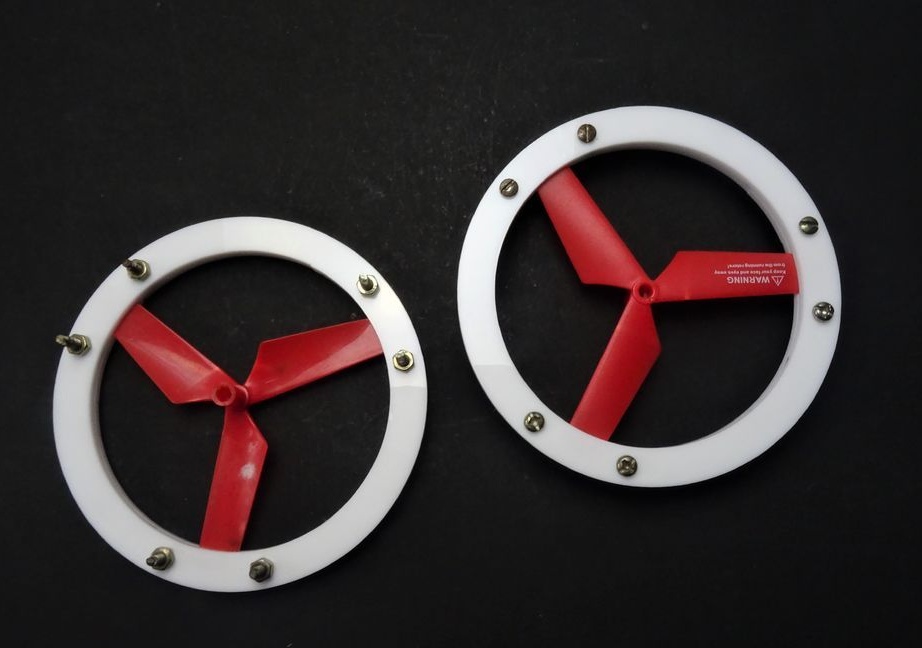
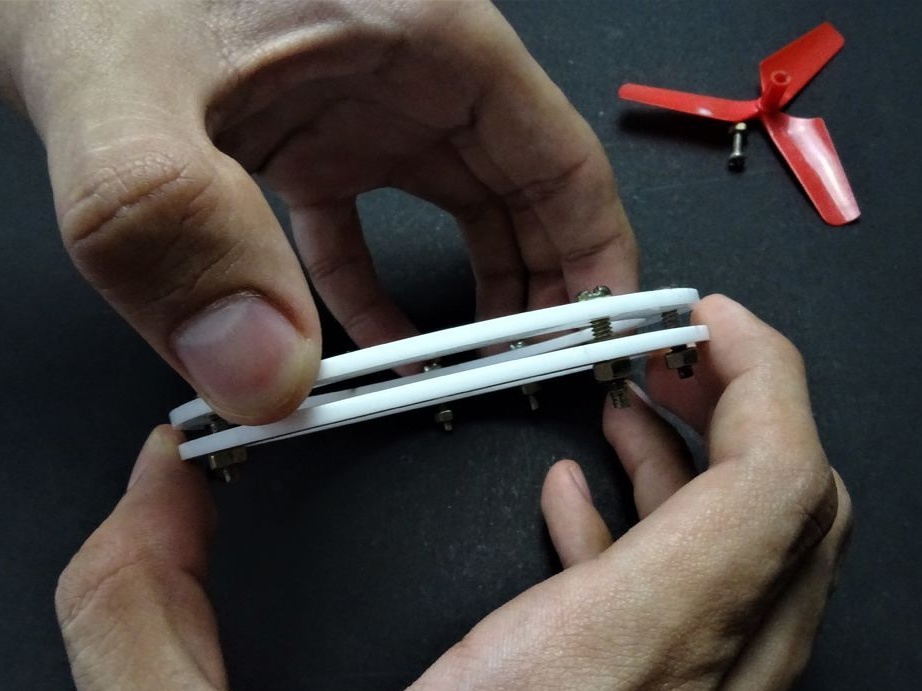
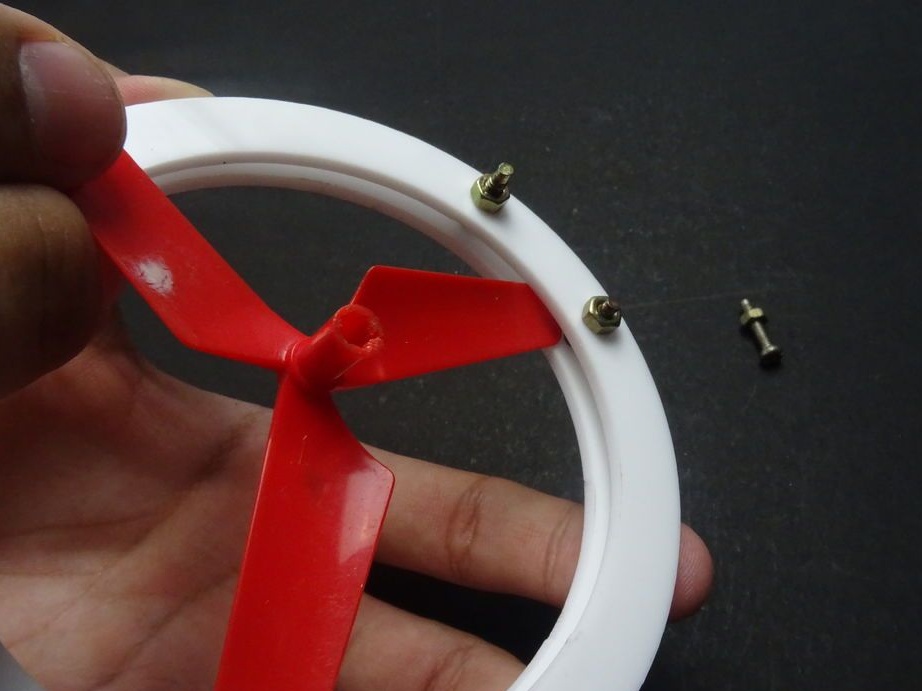
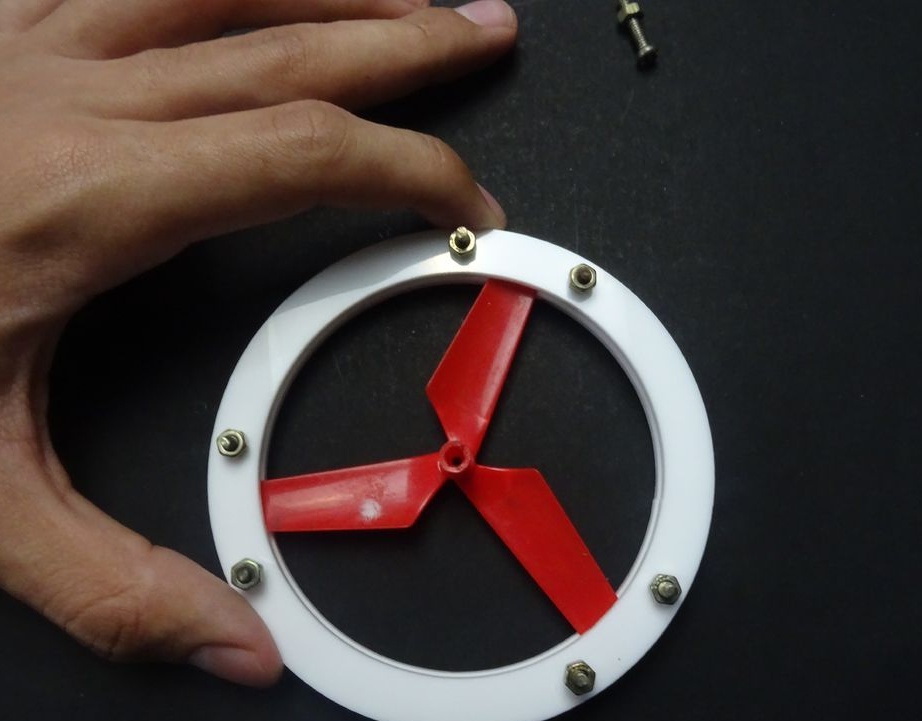

Задава външната джанта на колелото. Джантата трябва да бъде съвпадаща с вътрешния диск.
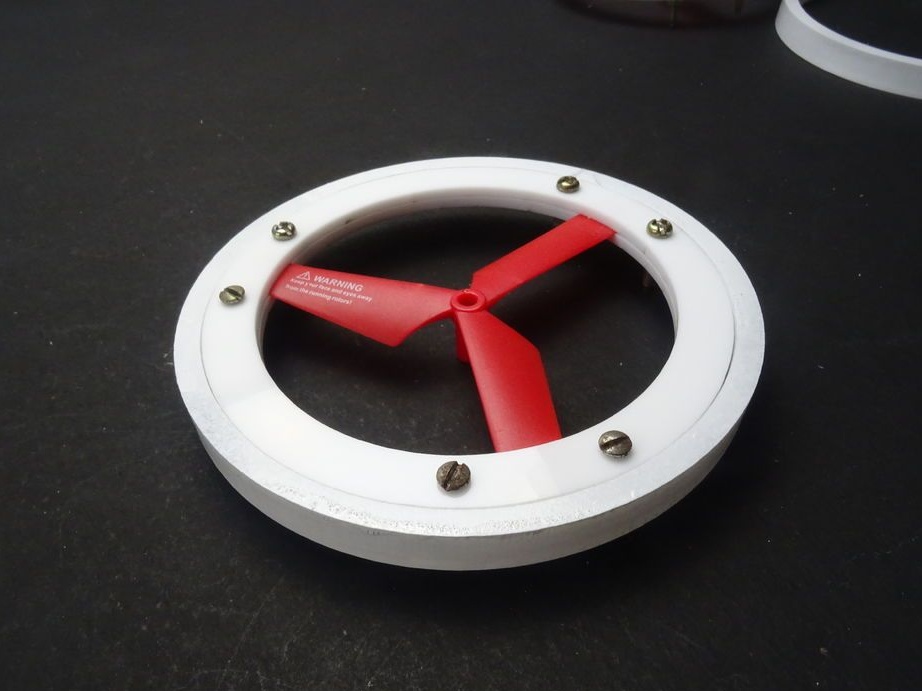

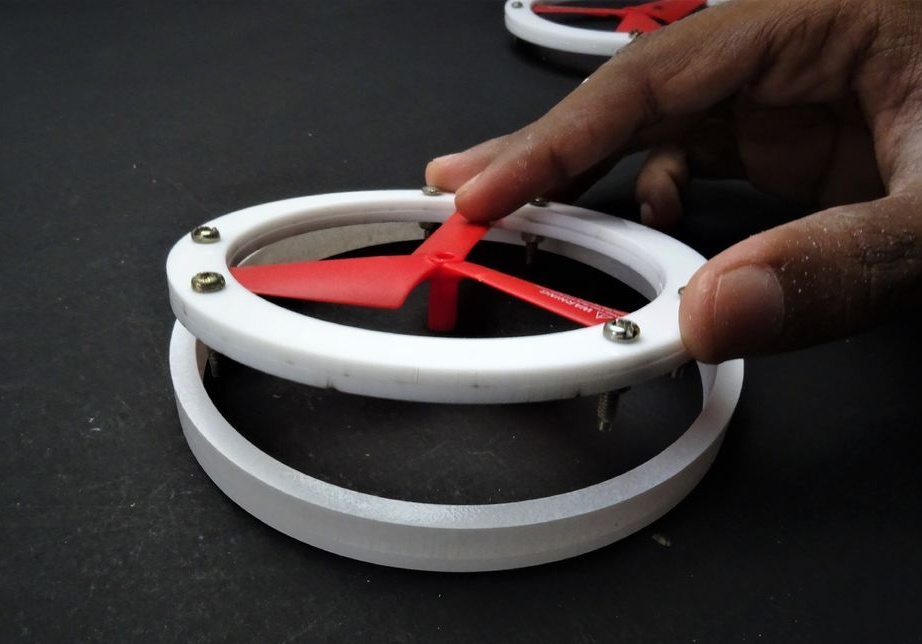
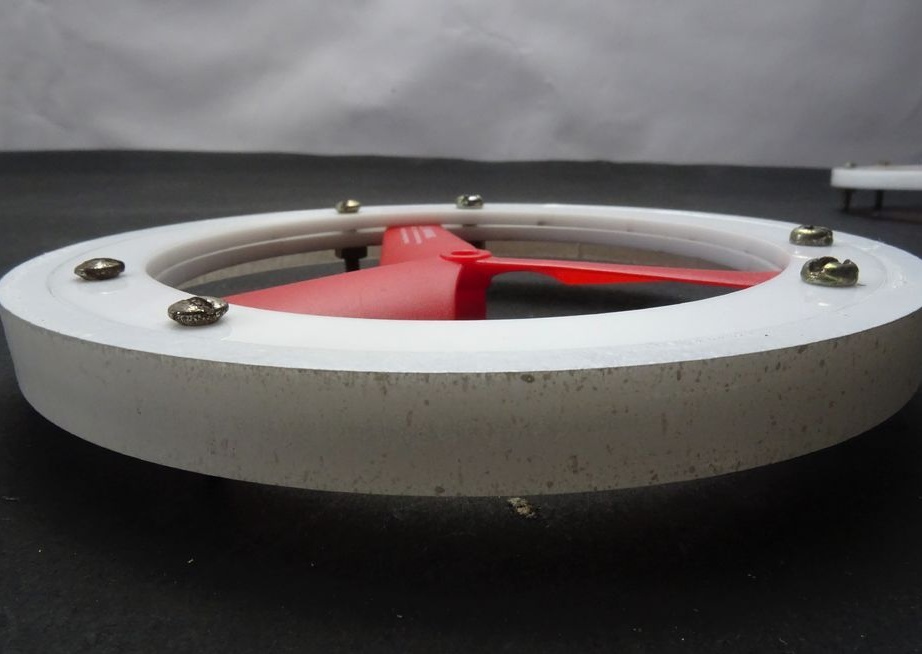

Нанесете горещо лепило върху ставата.


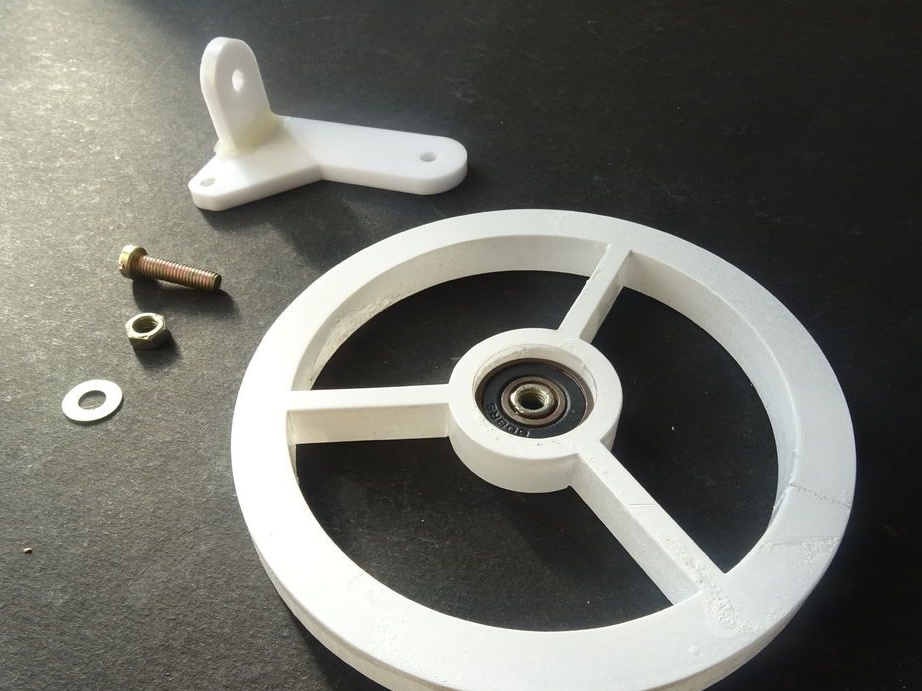
Сега събира предните колела.
Гайка с подходящ размер се запушва във вътрешната раса на лагера. Притиска лагерите в предните колела.
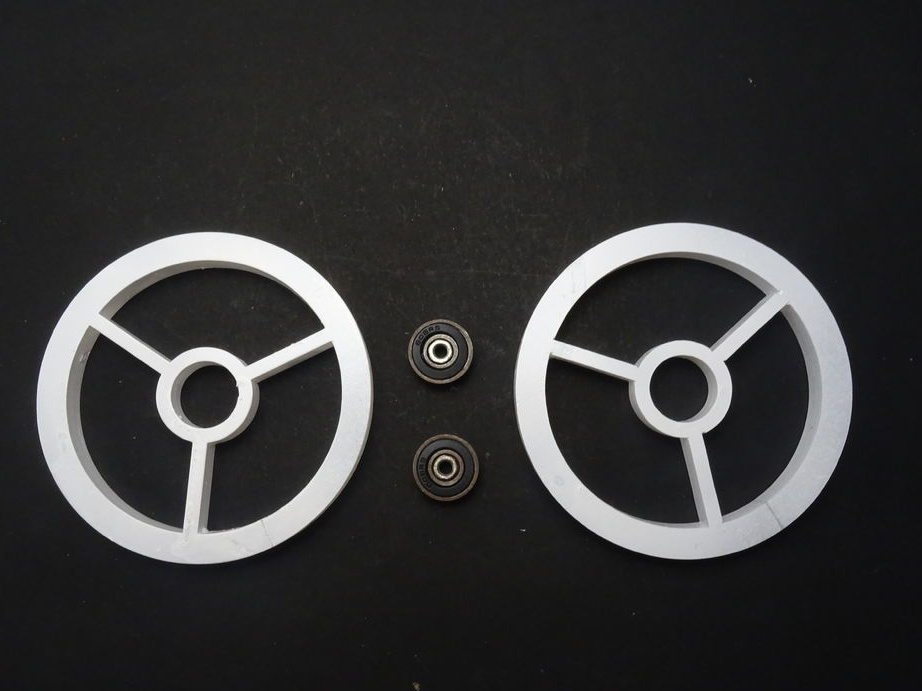



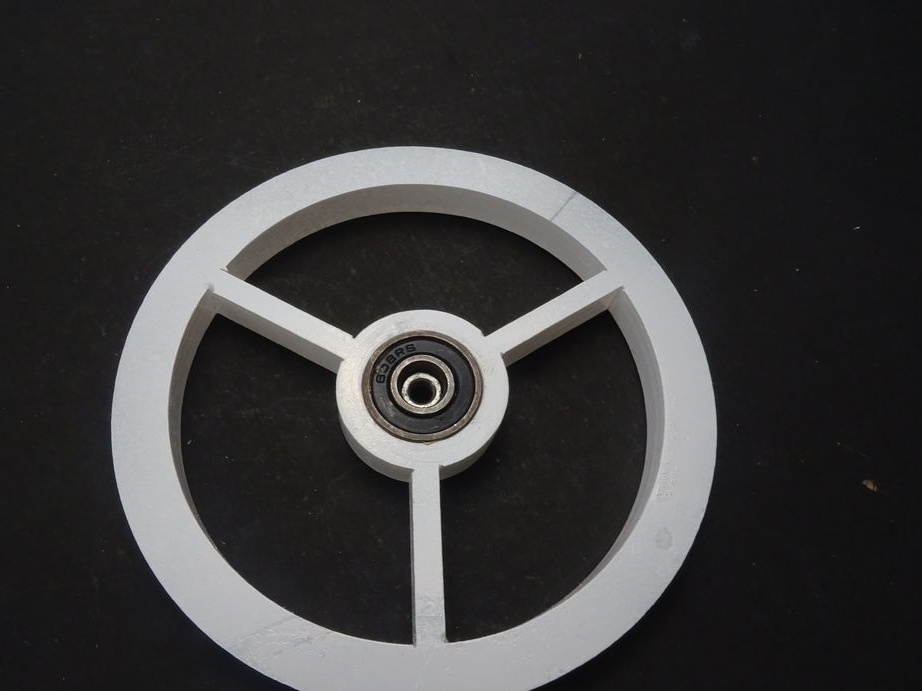
Колелата са готови.

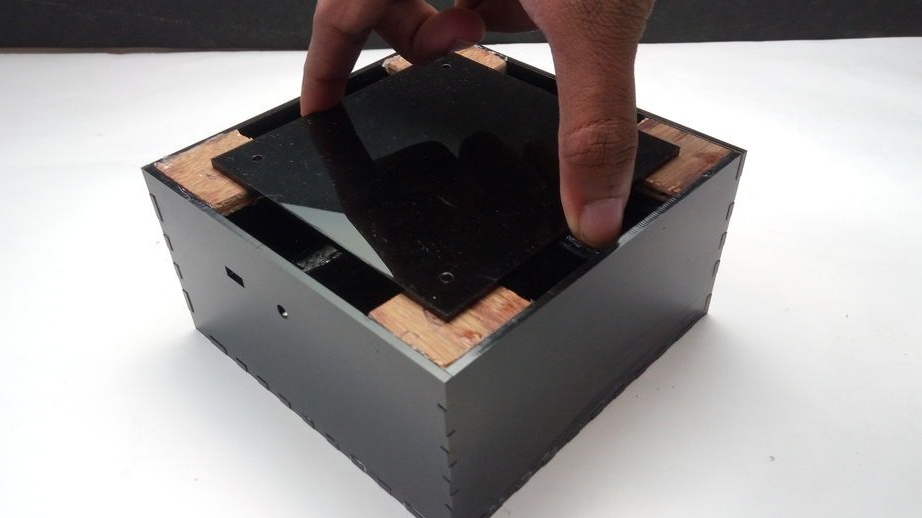
Стъпка дванадесета: Електронен корпус
Залепва корпуса на електрониката.

Това поле ще съдържа всичко електронен компоненти, което означава, че трябва да бъде хидроизолирана възможно най-добре.


Четири квадрата се изрязват и залепват от дъската в ъглите на кутията. Капакът на кутията ще бъде прикрепен към тях.



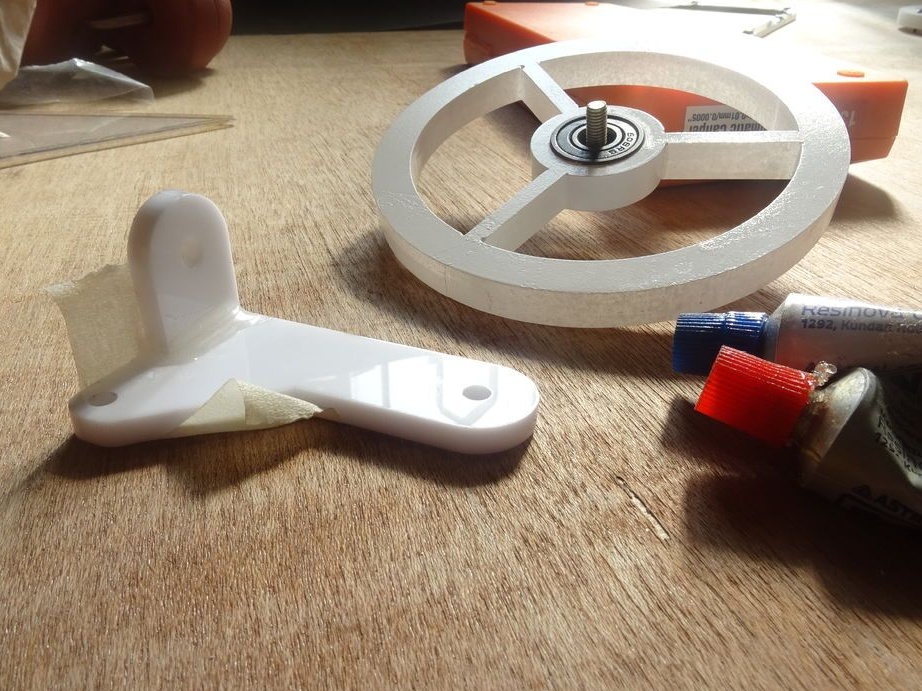
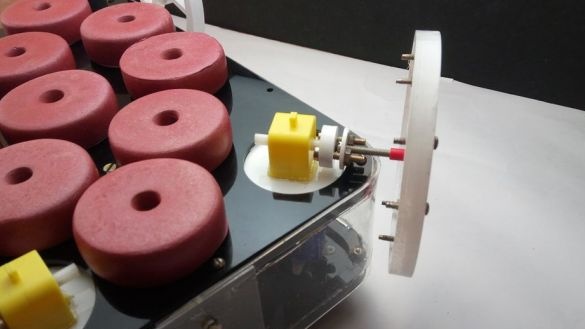
Стъпка тринадесет: Стойка за колела
Сега трябва да свържете колелата и зъбното колело със съединител.





Завинтете предните колела към сцепление.


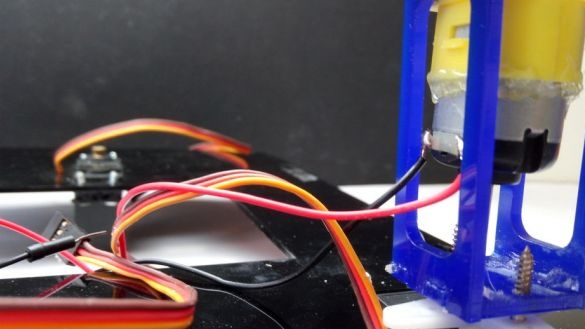
Стъпка четиринадесета: Свържете електрониката
Според схемата инсталира електрически части.
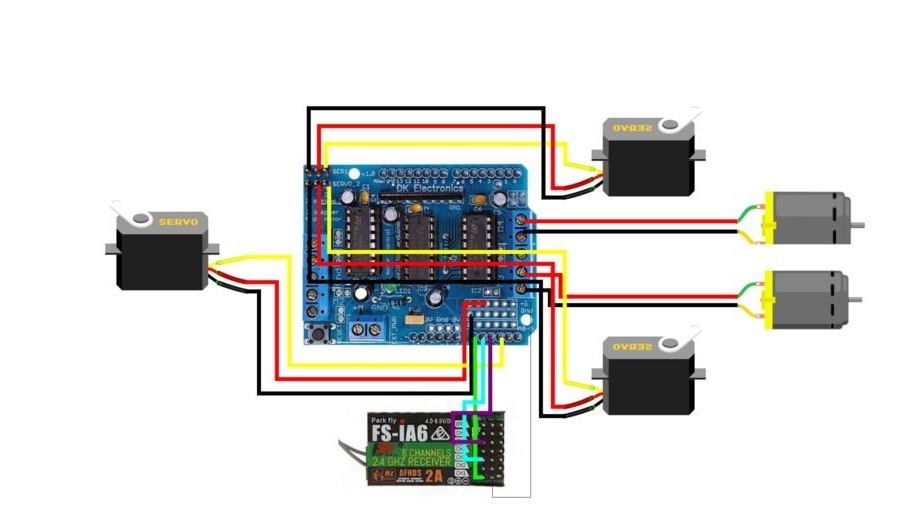

Проводниците на левия двигател към М1, дясната към М2. Свързва драйвер на двигателя. Свързва сервове. Инсталира приемника: gnd на приемника, за да gnd Arduino; +5 V приемник до +5 V Arduino; щифт 3 до A0; щифт 1 до А1; щифт 5 към А2. Свързва батерията.
Стъпка петнадесета: Код за изтегляне
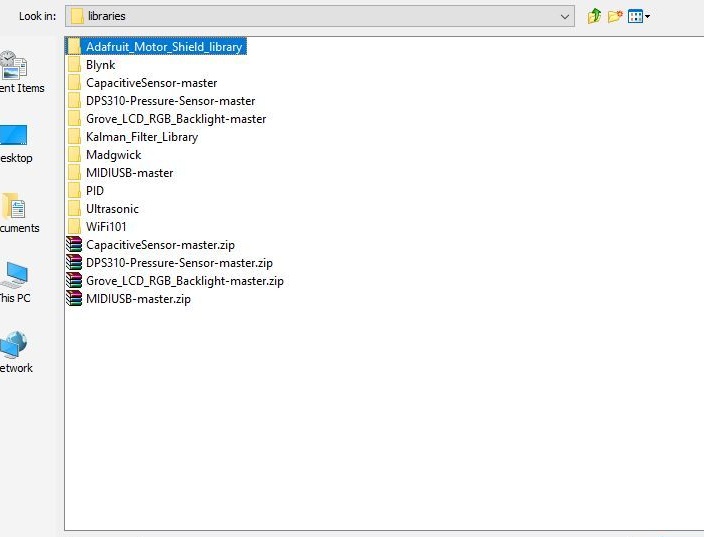
Първо трябва да изтеглите библиотеката.
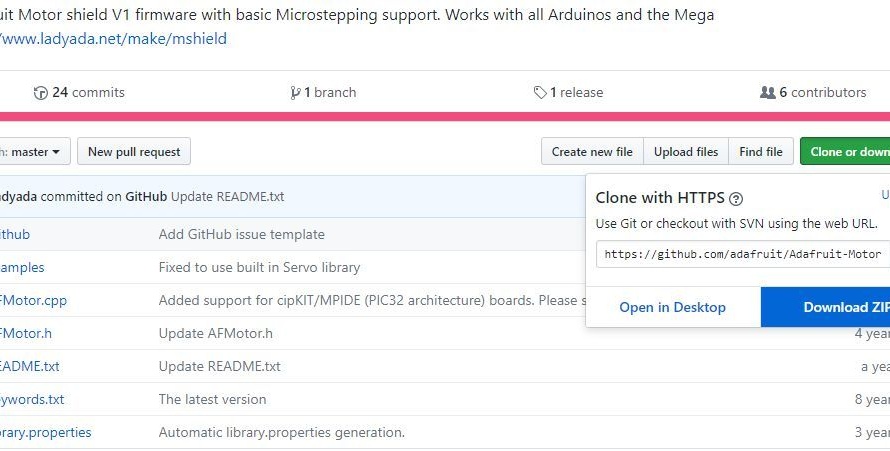
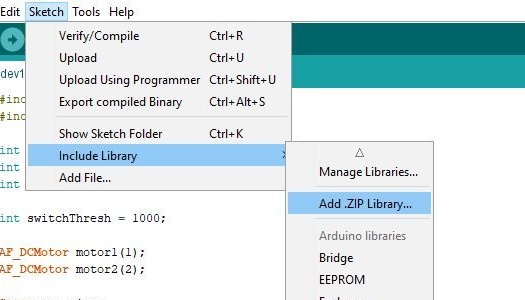
След това изтеглете кода. При зареждане батерията трябва да бъде изключена.
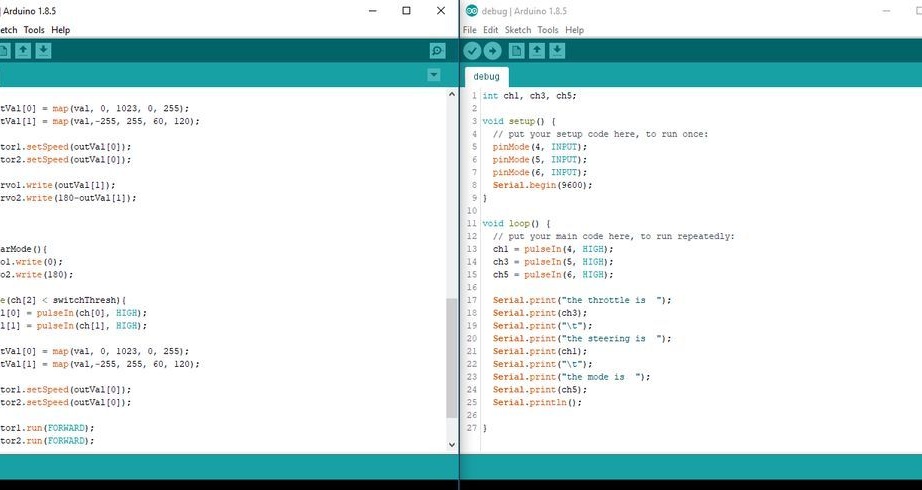
Изтеглете кода по-долу.
amphibious_rover_code.ino
След като изтеглите кода, той проверява работата на двигателите и задвижванията.
Стъпка шестнадесет: монтаж
Сега е време да сглобяваме превозното средство за цял терен.
[център[/ център]
Инсталира сервомери. Инсталира зъбни двигатели.

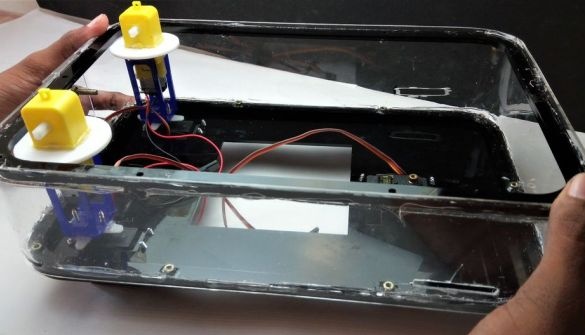
Закопчава колелата. Извива и двете половини на тялото.






Всичко е готово и сега можете да тествате.