
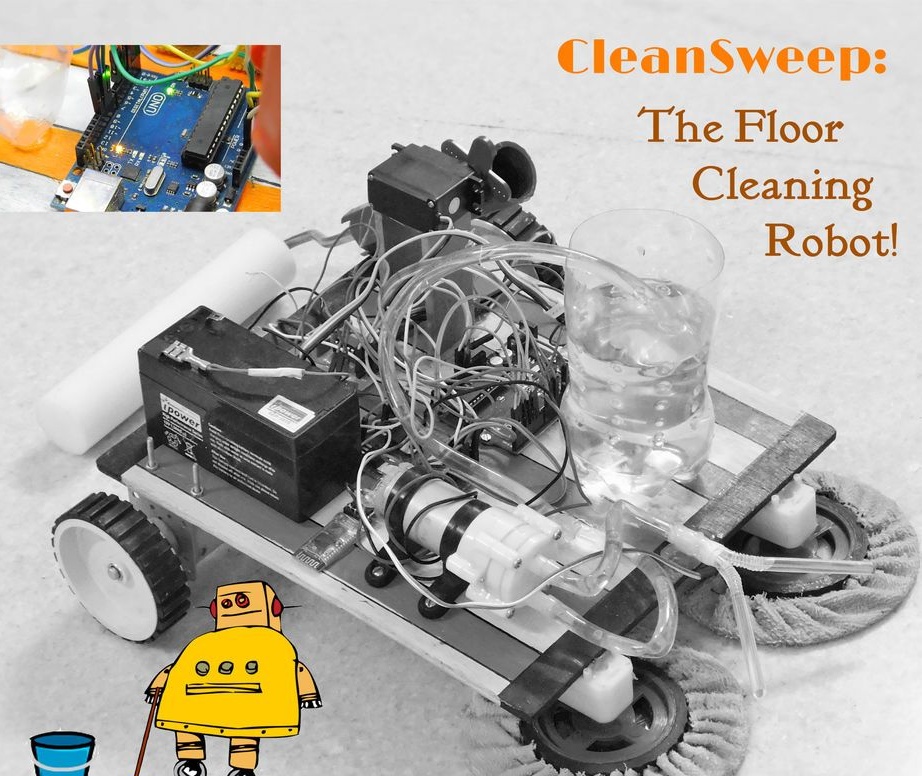
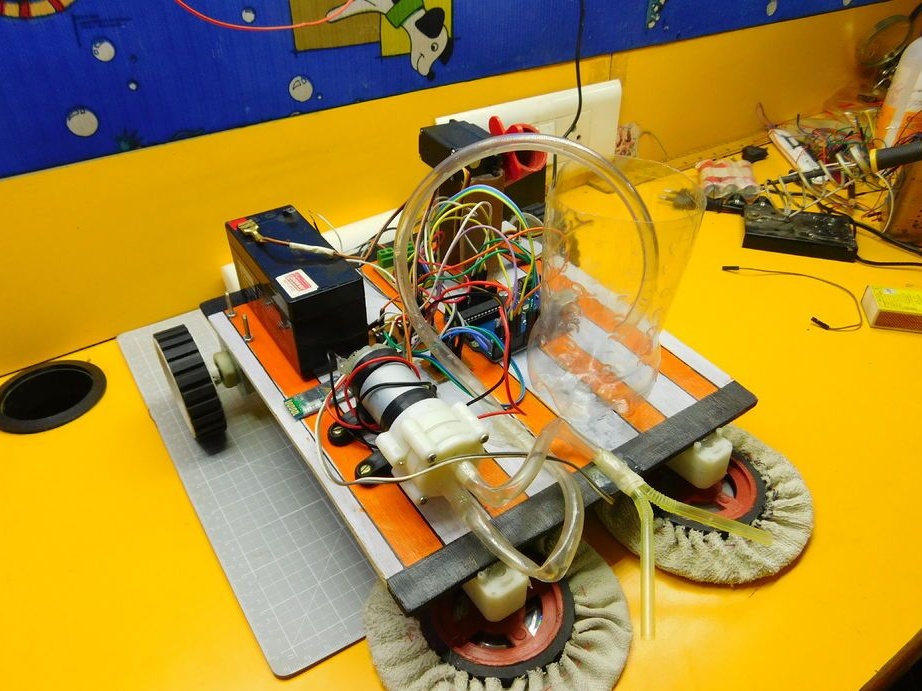


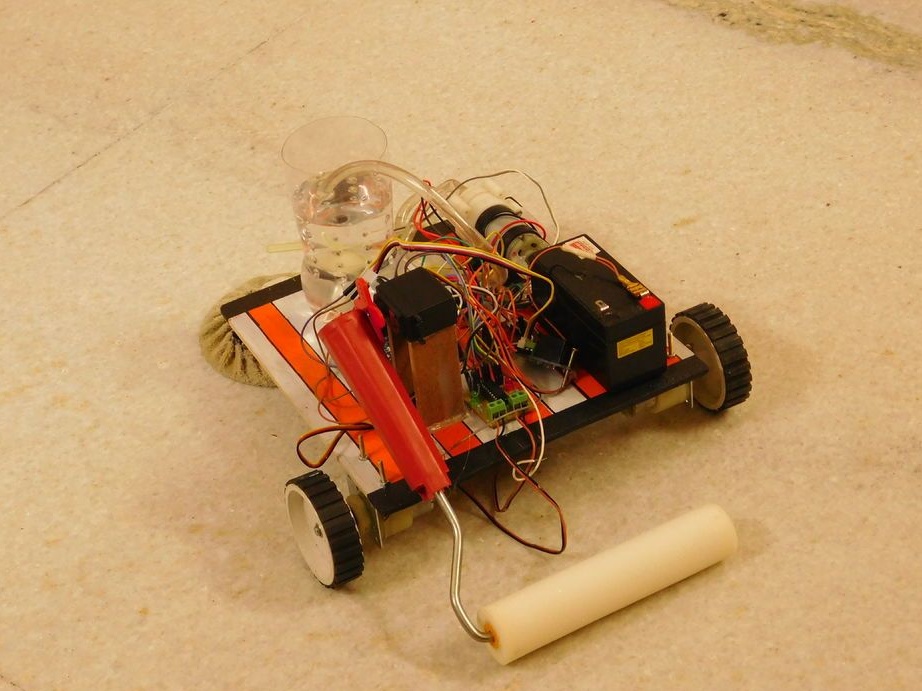
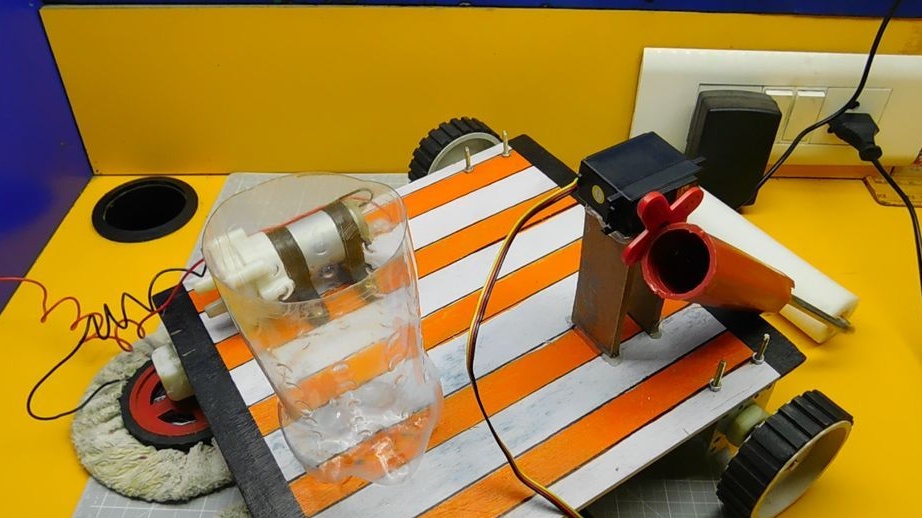
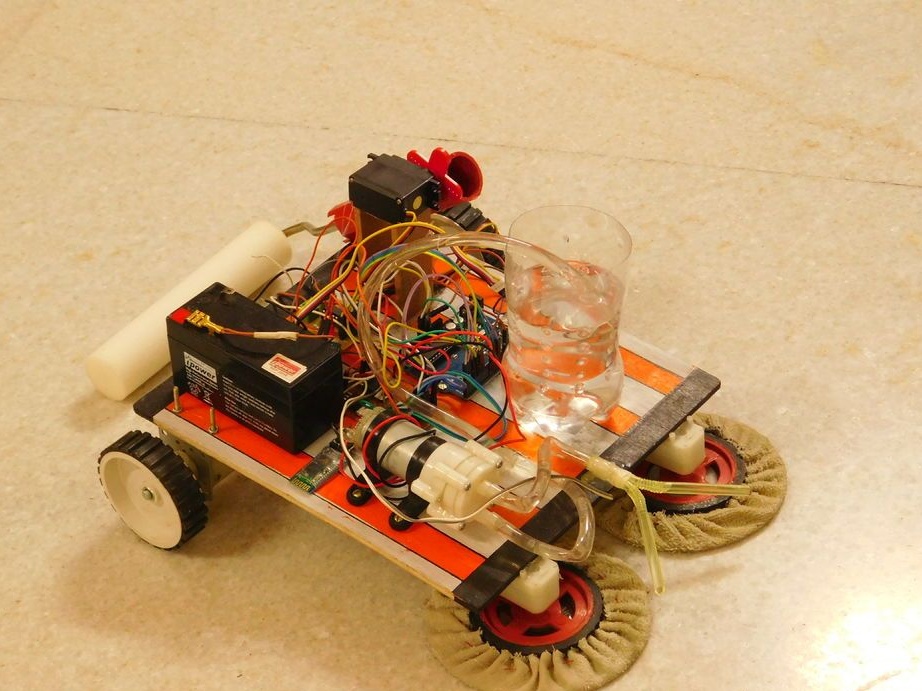
РоботътКомбайнът има в арсенала си две въртящи се четки, монтирани в предната част на вала на редуктора. Скоростната кутия се върти със скорост 75 об / мин. Роботът има резервоар за вода на борда. В задната част на робота е фиксирана ролка. Роботът се смесва с помощта на колела, фиксирани върху оста на редуктора. Почистващият се управлява от смартфон чрез bluetooth. В бъдеще Учителят планира да направи робота напълно автономен. Нека да видим как работи това устройство.
Инструменти и материали:
-Моторна предавка 100 об / мин -2 бр .;
-Коли за двигателя -2 бр;
-Мотор-редуктор с колело 75 об / мин - 2 бр;
-Arduino UNO;
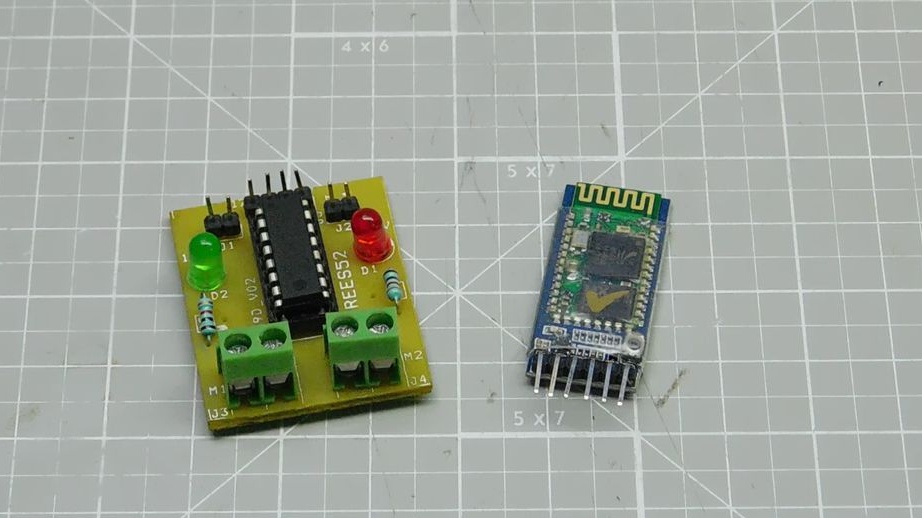
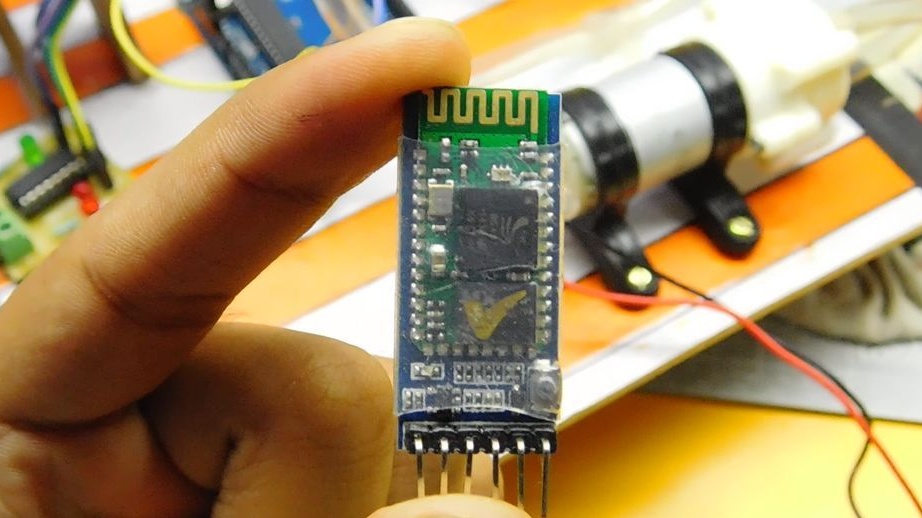
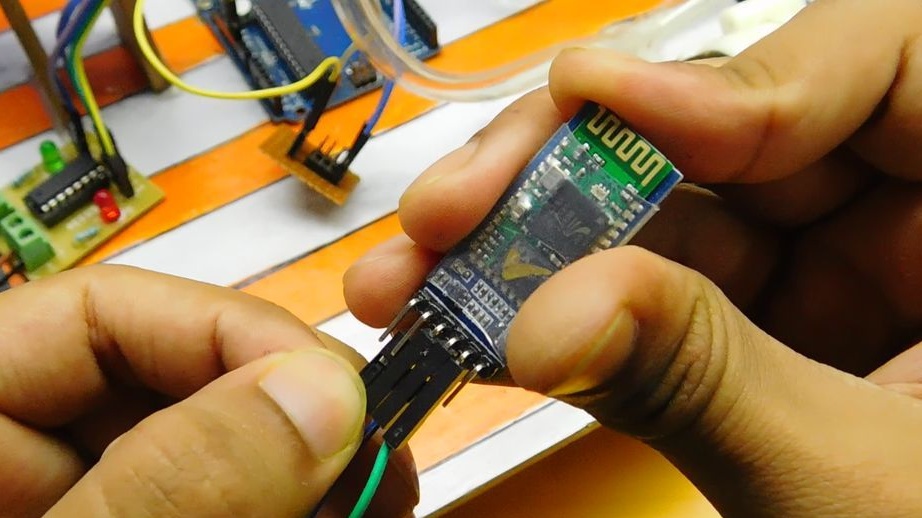
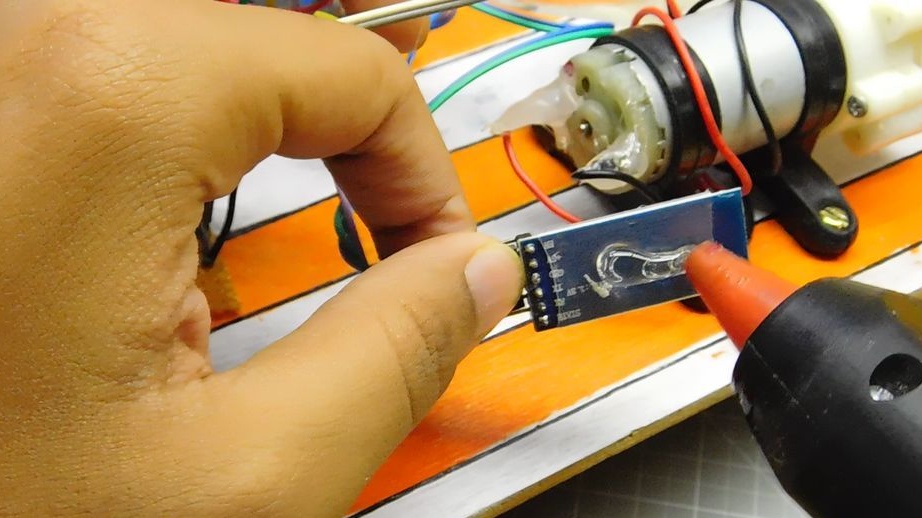
- Bluetooth модул HC-05/06;
-Драйвер L293D;
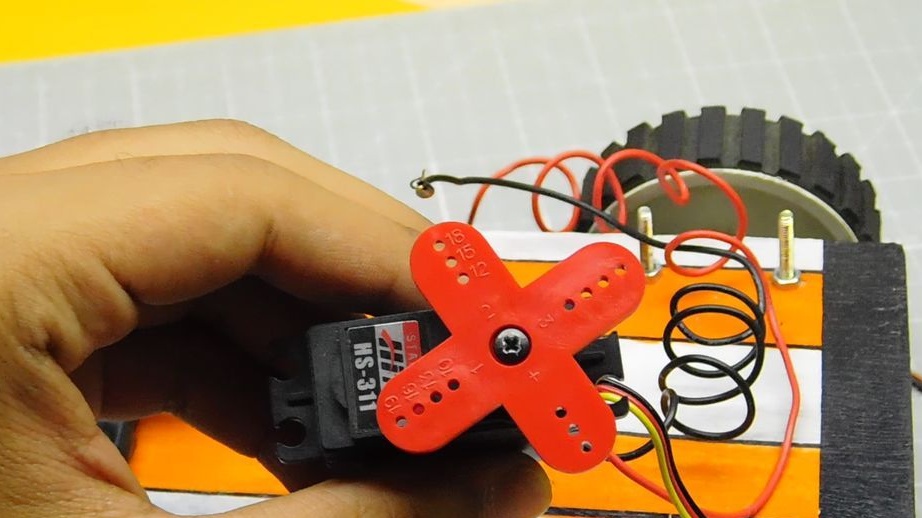
- Сервомотор (въртене на 180 градуса);
-12V батерия;
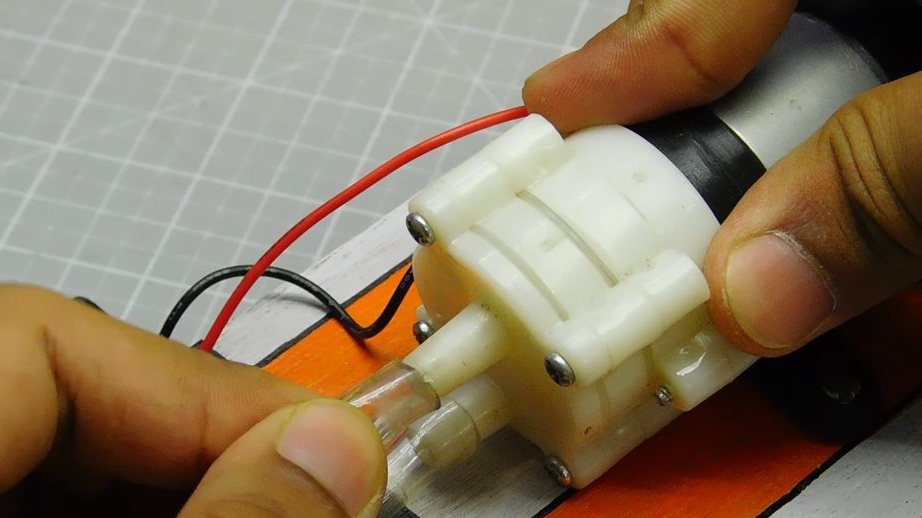
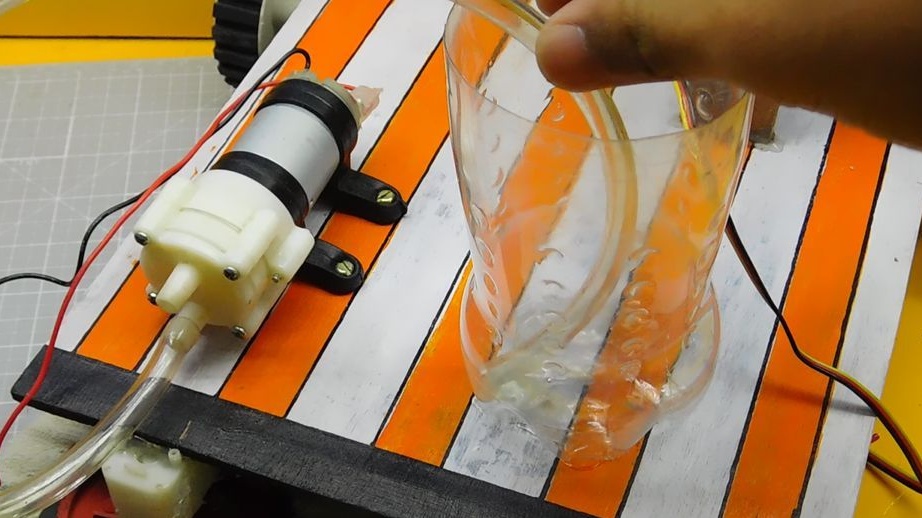
- помпа 12 V;
Транзистор TIP31C;
Транзистор TIP122;
- CD устройство - 2 бр .;
- Валяк за боя;
- Салфетки от плат;
- Игла с конец;
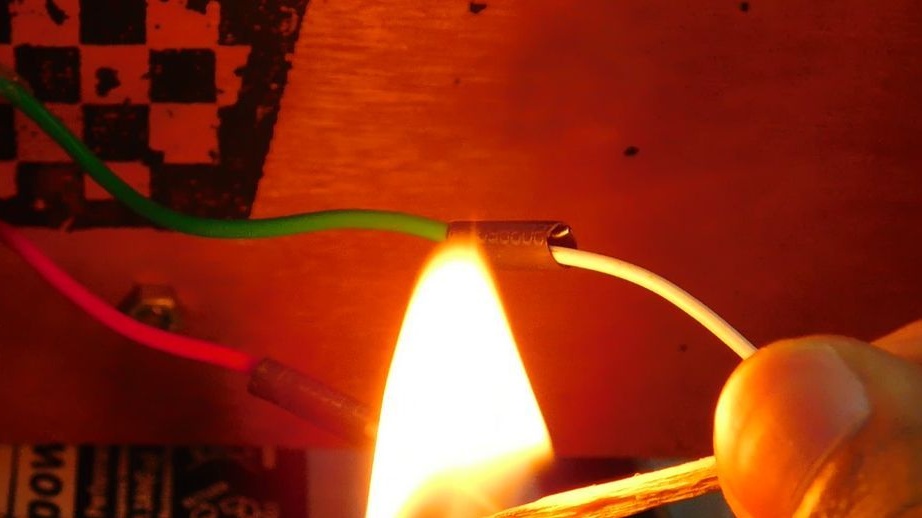
-Trubka;
seeing-;
- джъмпери;
-Монтажна дъска;
-Krepezh;
-Fanera;
-Пластична бутилка;
-Поядащо желязо;
-Лесен пистолет;
-Drel;
- Клещи;
-Dremel;
- четка;
-Colors;
-Marker;
- ножица;











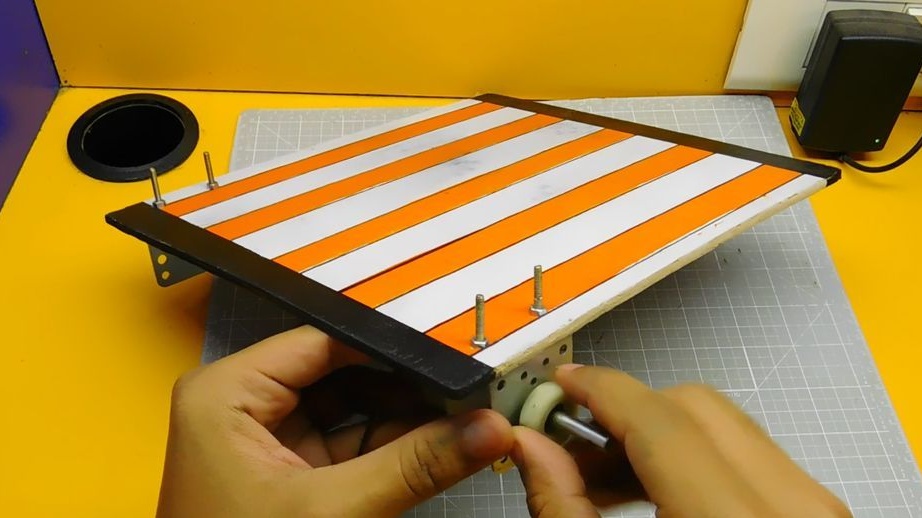
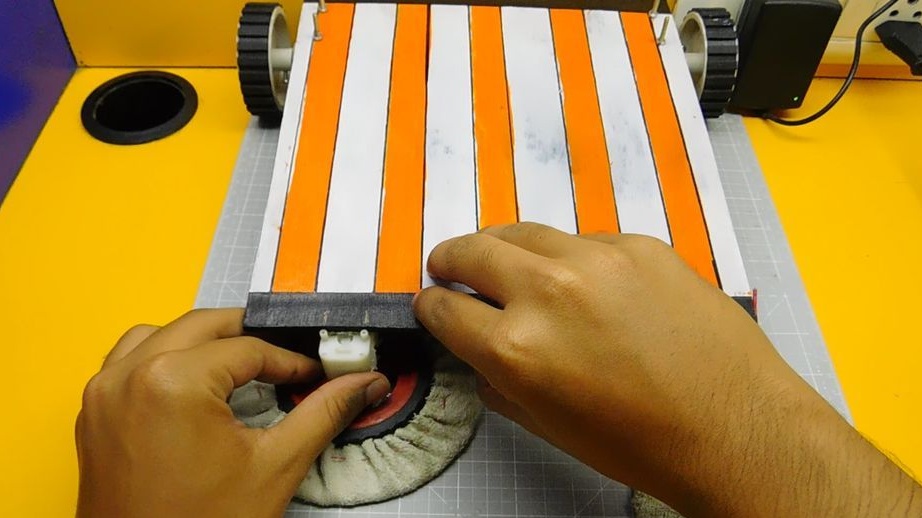
Първа стъпка: Фондация
От шперплат отрязва основата. Размерите на основата са 30 * 22 см. Боядисва основата. От една страна, той фиксира мотора на зъбното колело. Коаксиално фиксира мотора на редуктора от другата страна на основата.



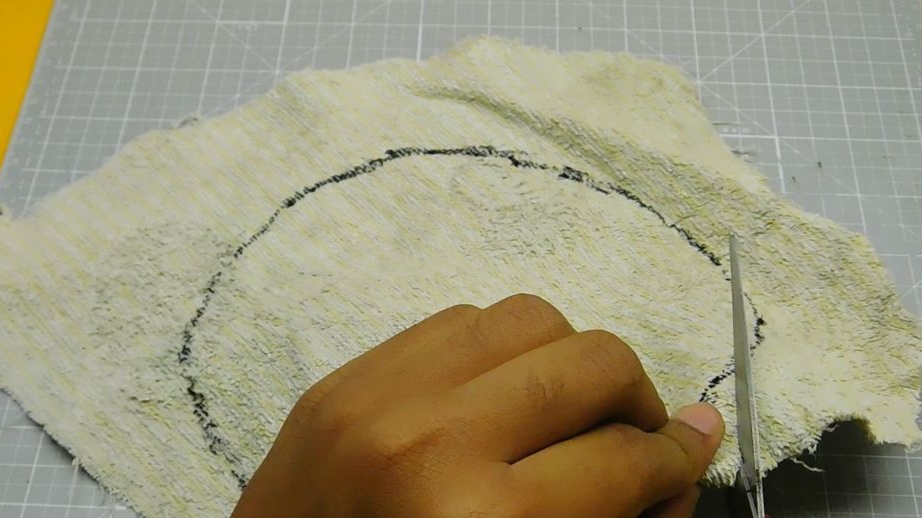
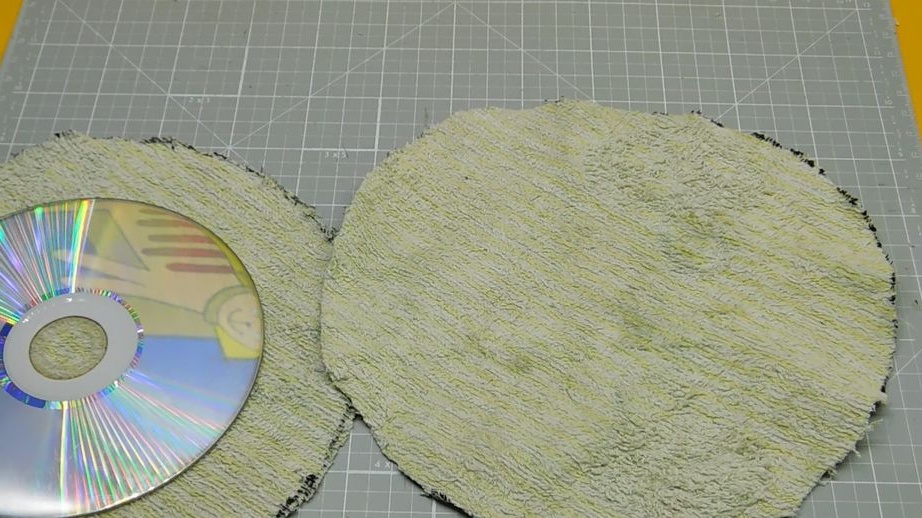
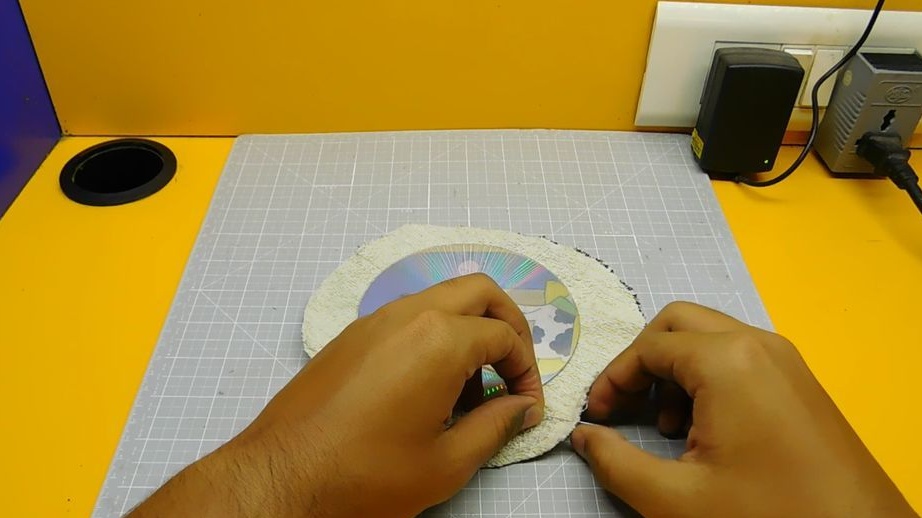
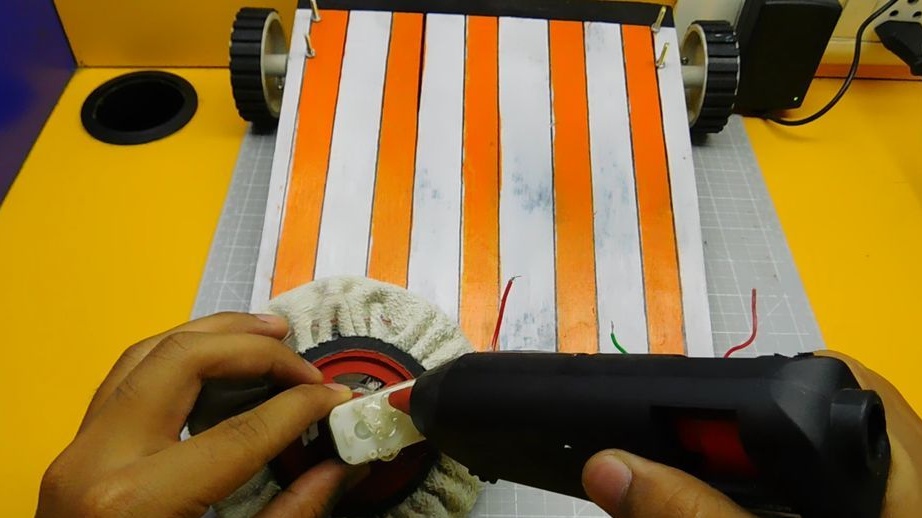
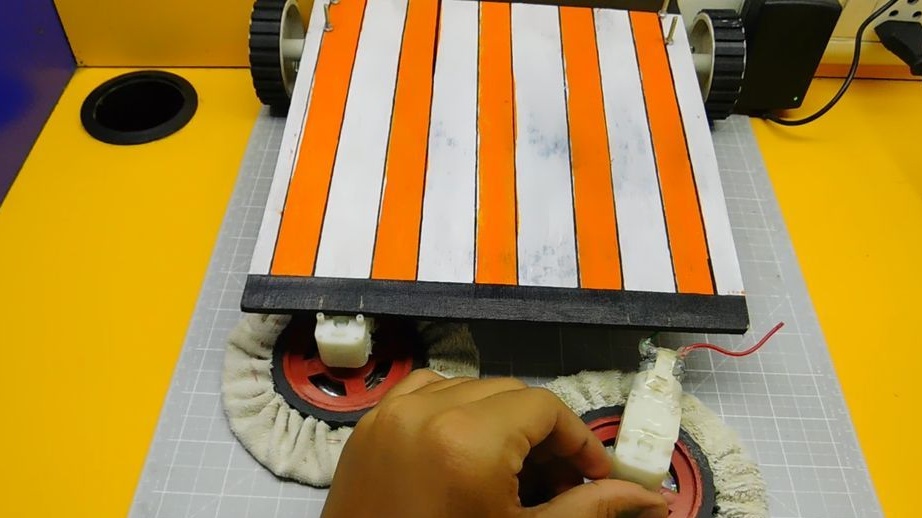
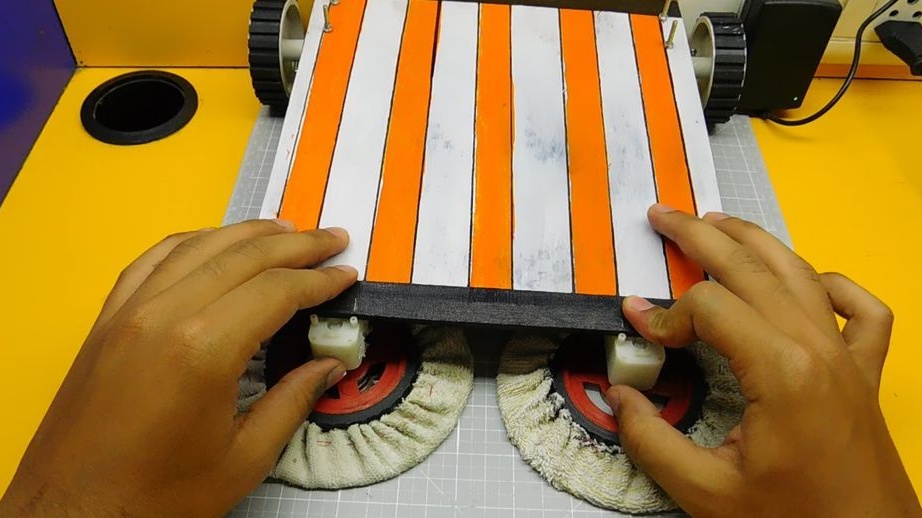
Втора стъпка: Четки
Майсторът направи четки от стари компактдискове. Нарежете парцал. Обгърна шофирането си. Повторна операция с друг диск. Закрепете дисковете с горещо лепило на колелото на редуктора. Обезопасени двата мотора на предавката пред платформата.








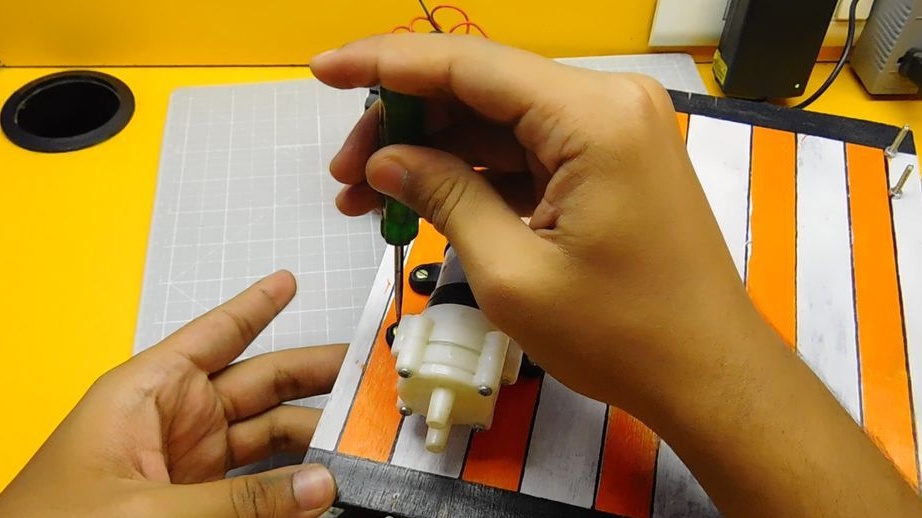
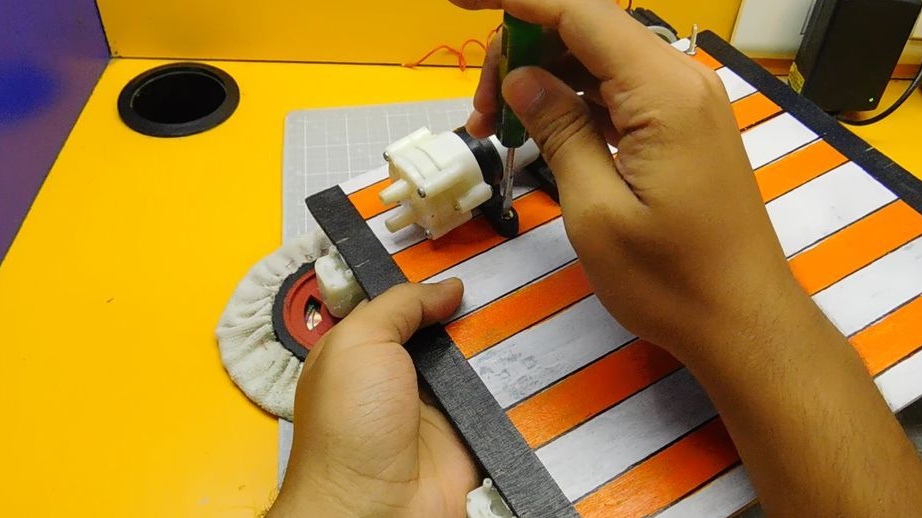
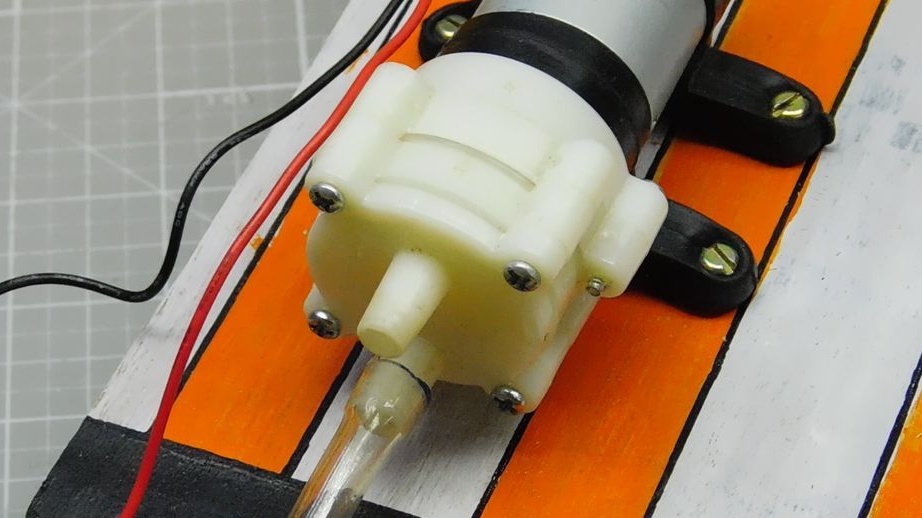
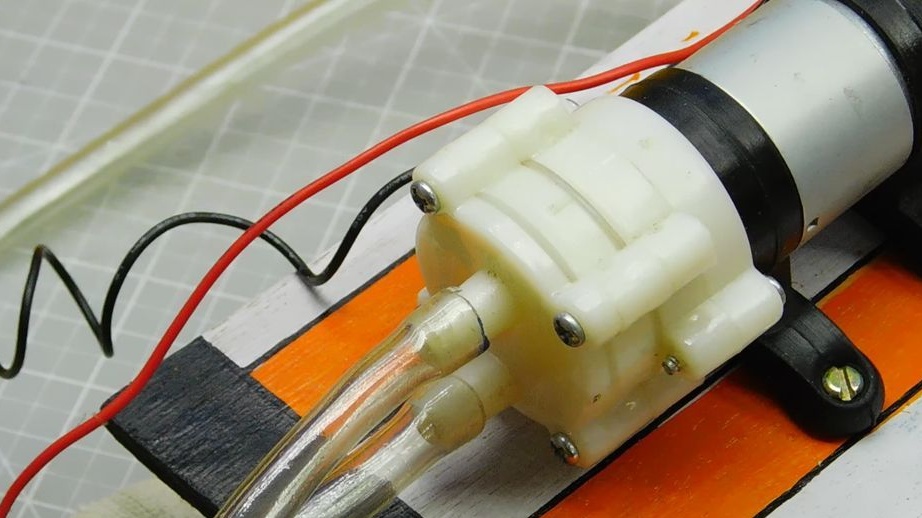
Стъпка втора: Водоснабдяване
Закрепва помпата към платформата. Изрязва горната част на пластмасова бутилка. Закрепя бутилката към платформата. Инсталира водопроводна тръба. По-късно тръбата за подаване на вода към четките ще бъде фиксирана.




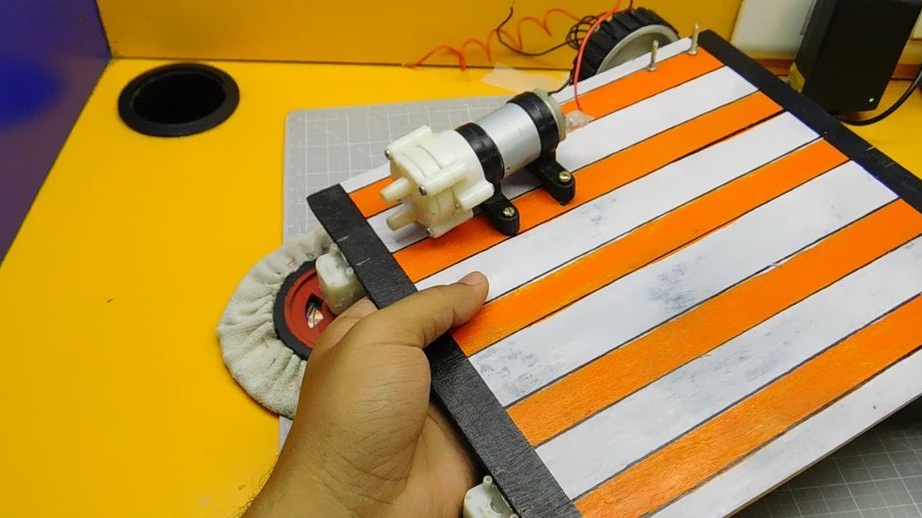




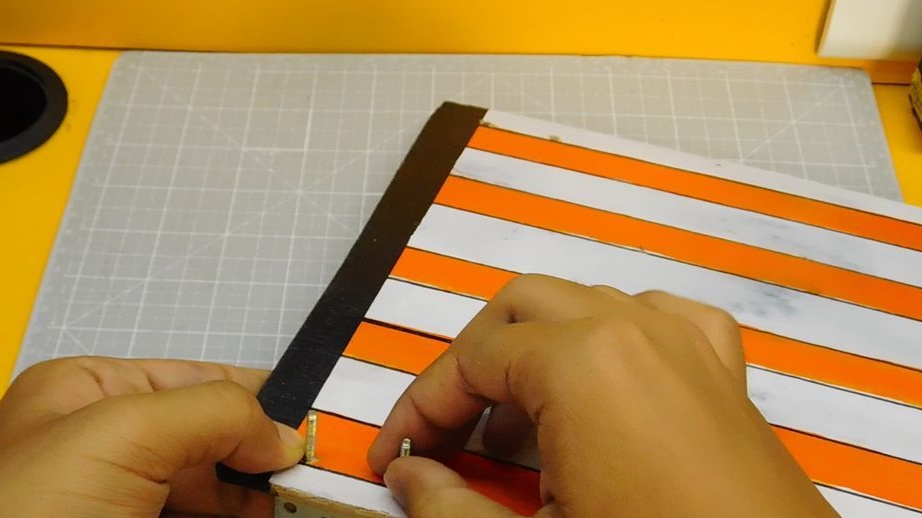
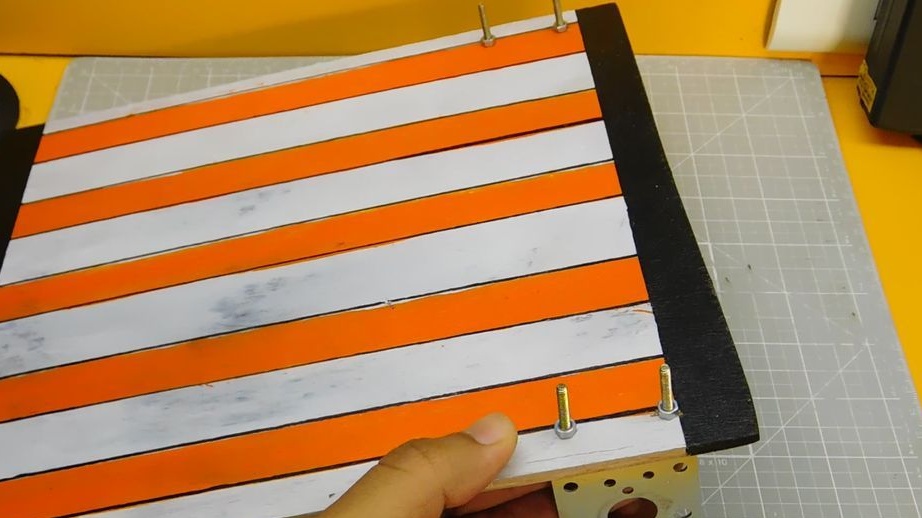
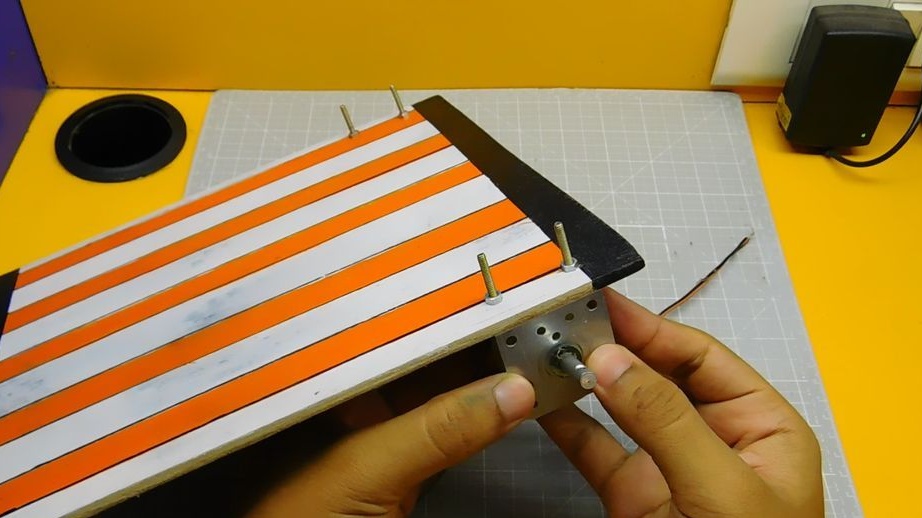
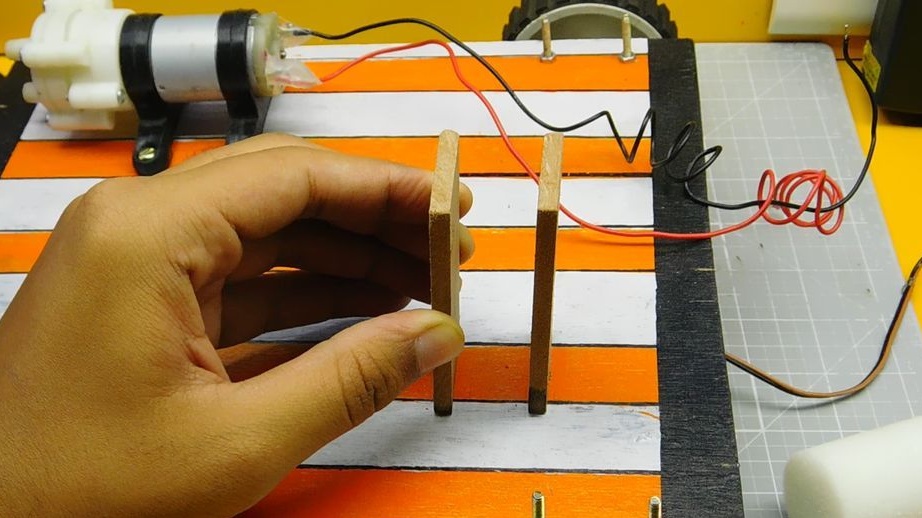
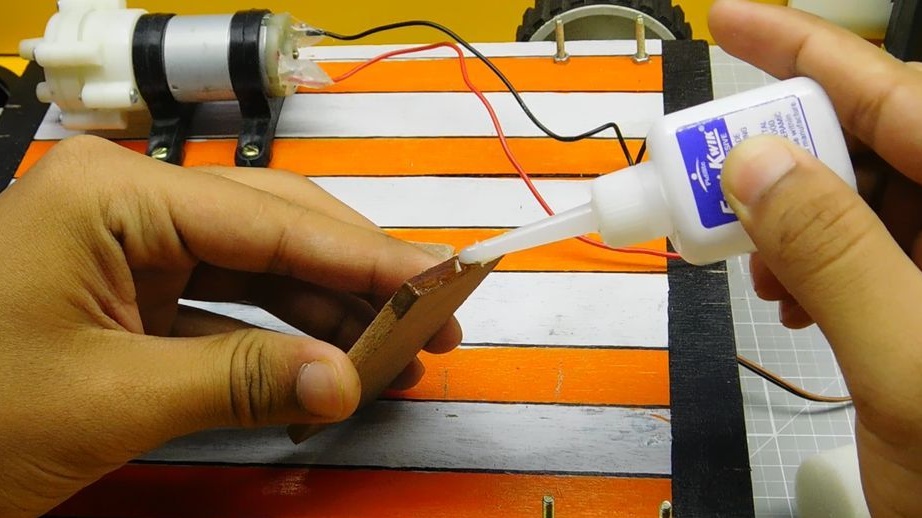
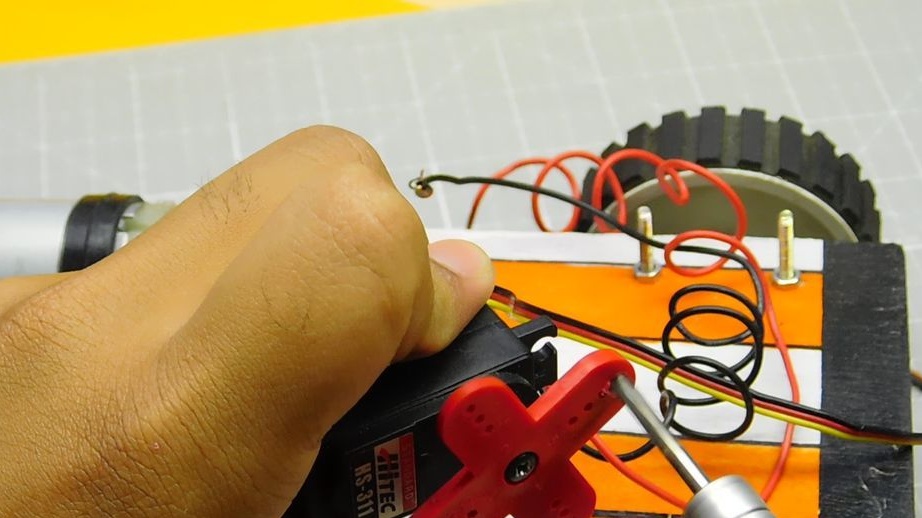
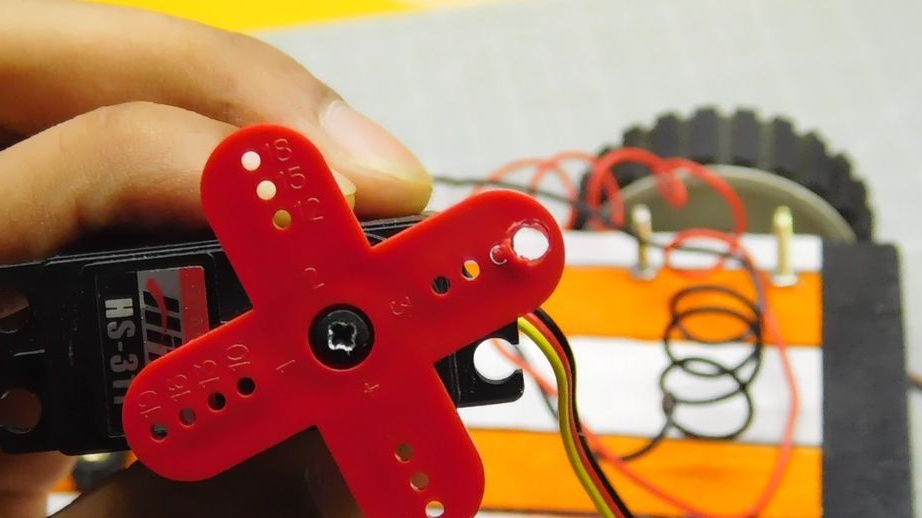
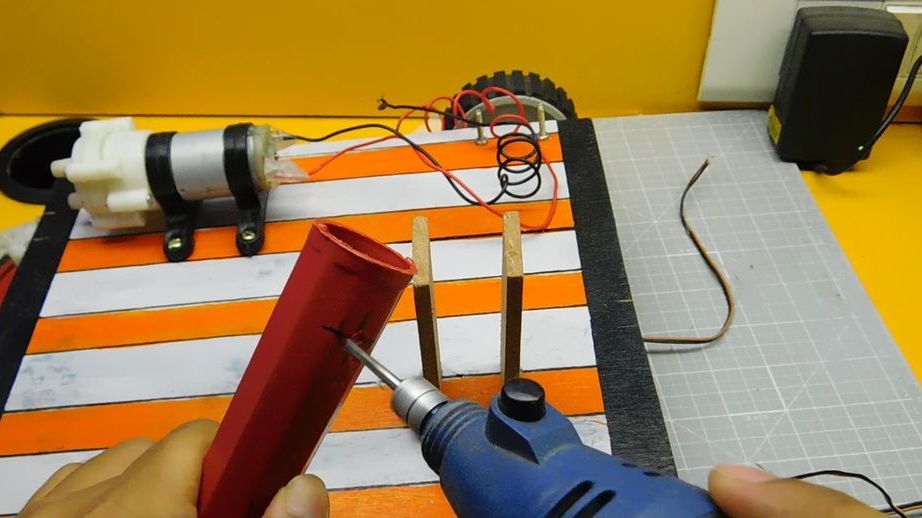
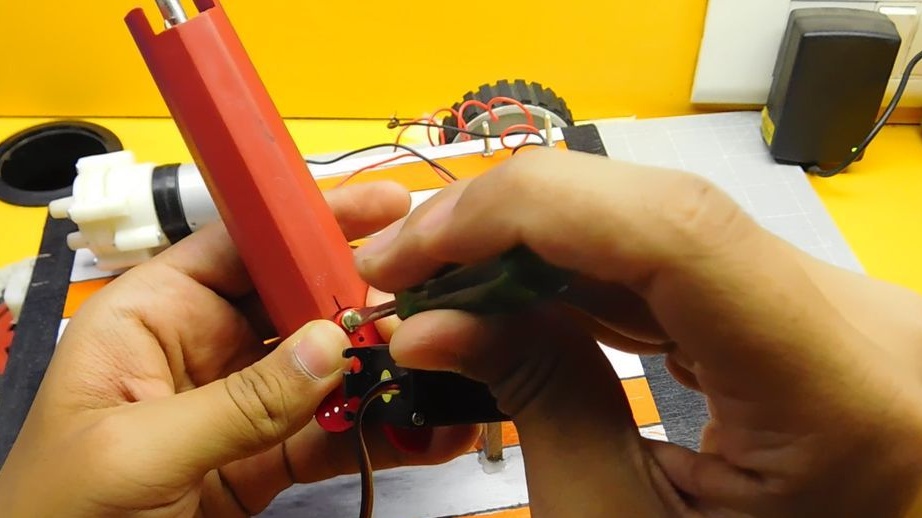
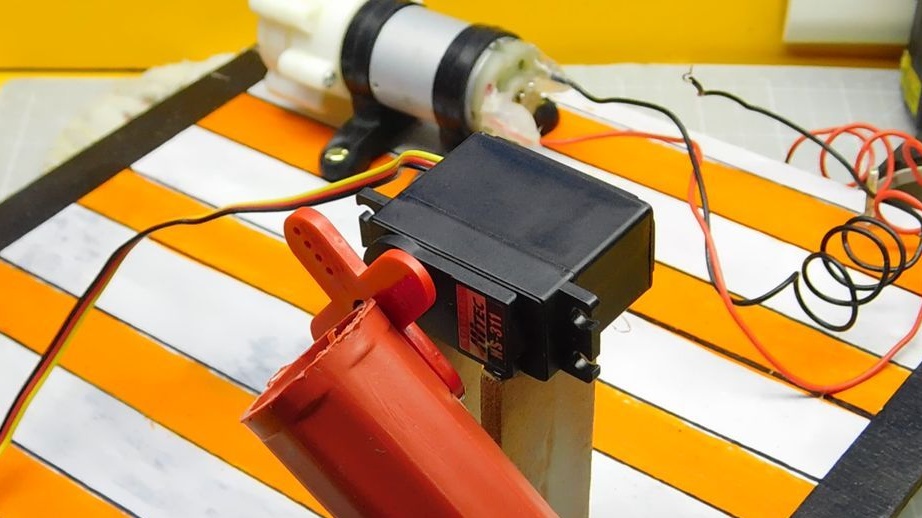
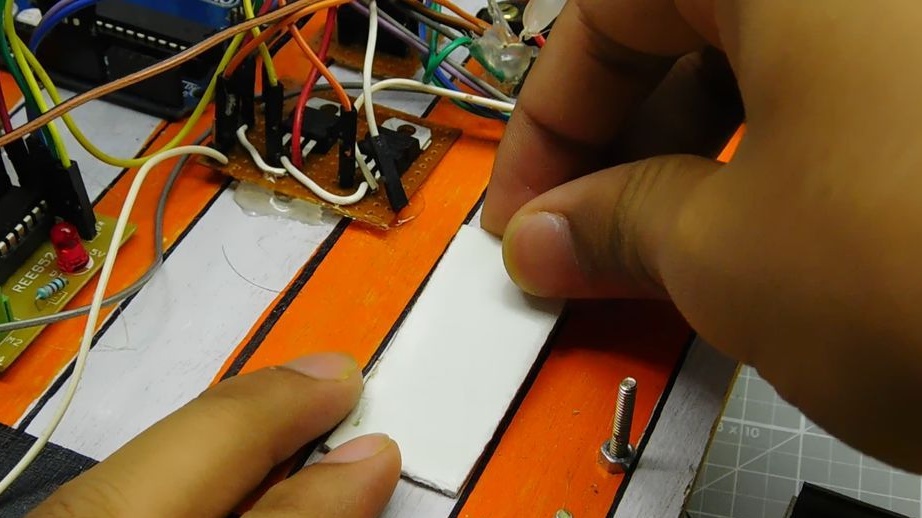
Трета стъпка: Механизъм за повдигане на ролетите
Задачата на валяка е да събира фин прах. Тъй като е необходимо понякога ролката, капитанът реши да направи механизъм за повдигане и спускане на ролката. Фиксира две летви на платформата успоредно една на друга. Прави два отвора, единият в серво лоста, вторият в дръжката на ролката. Завинтете дръжката на ролката към лоста. Закрепя сервото към летвите.


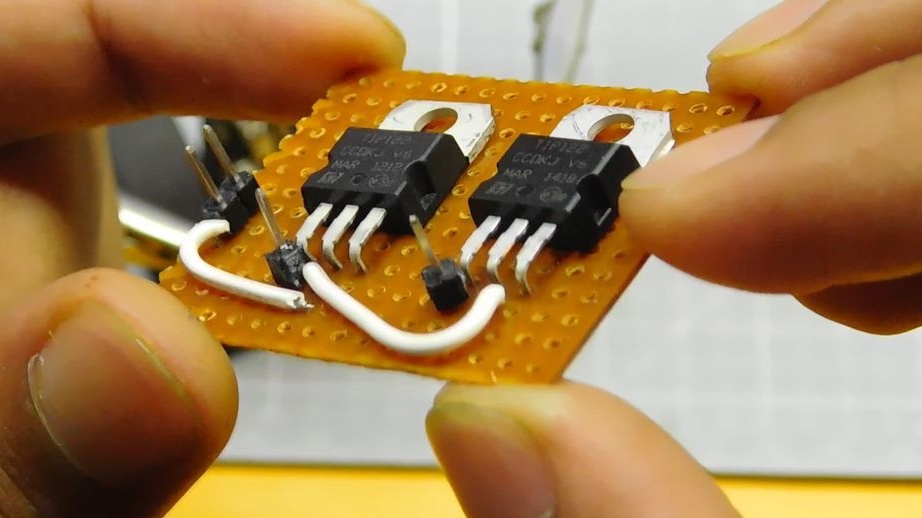
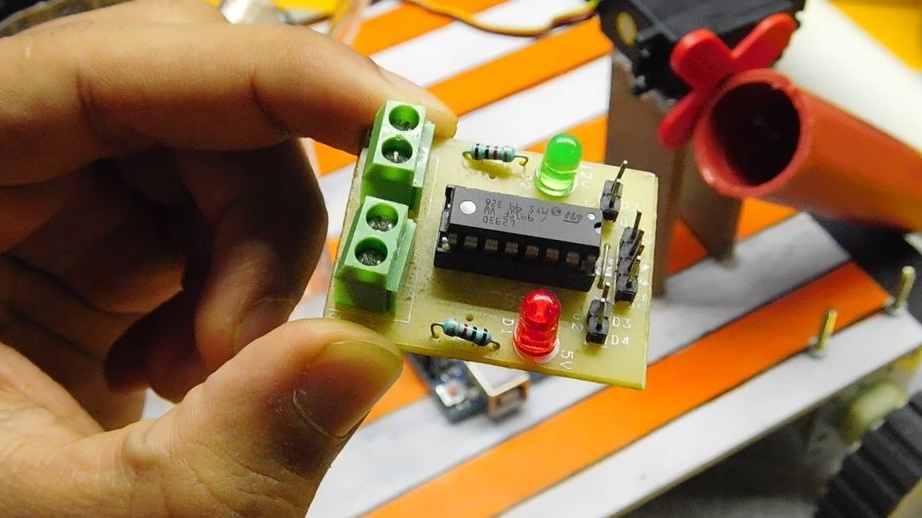
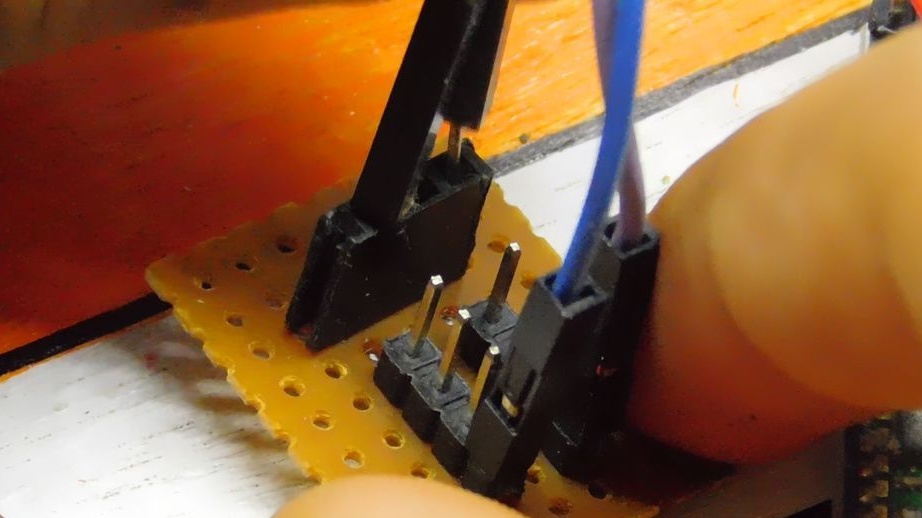
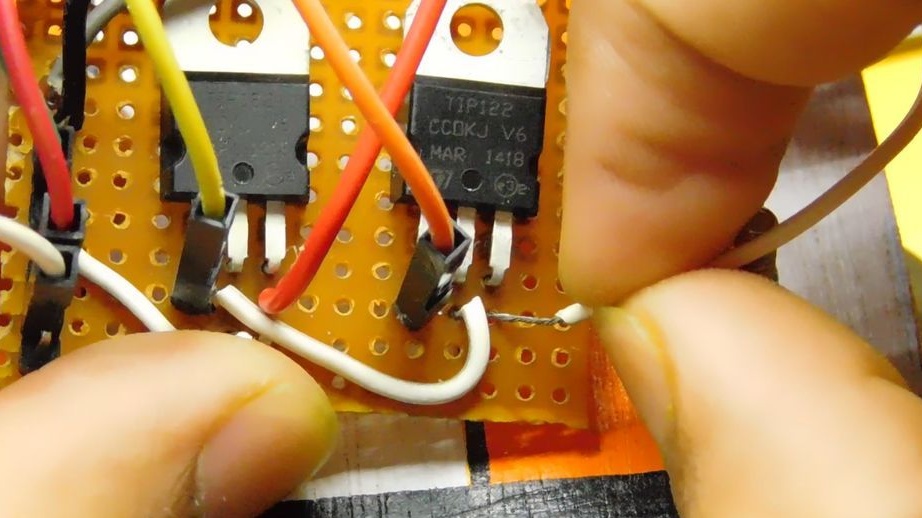
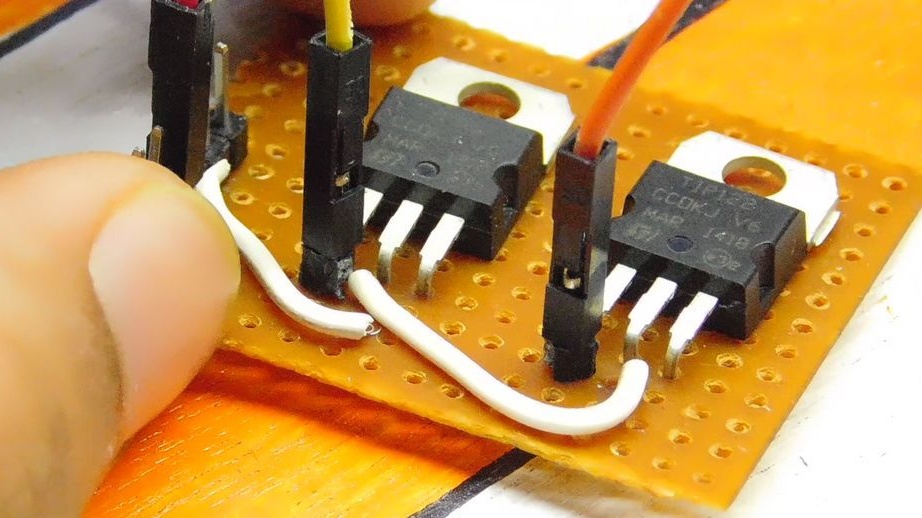
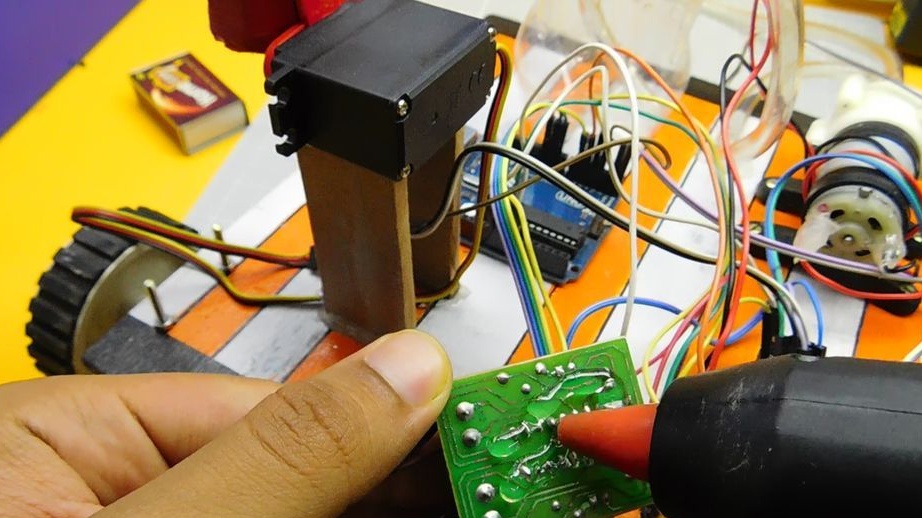
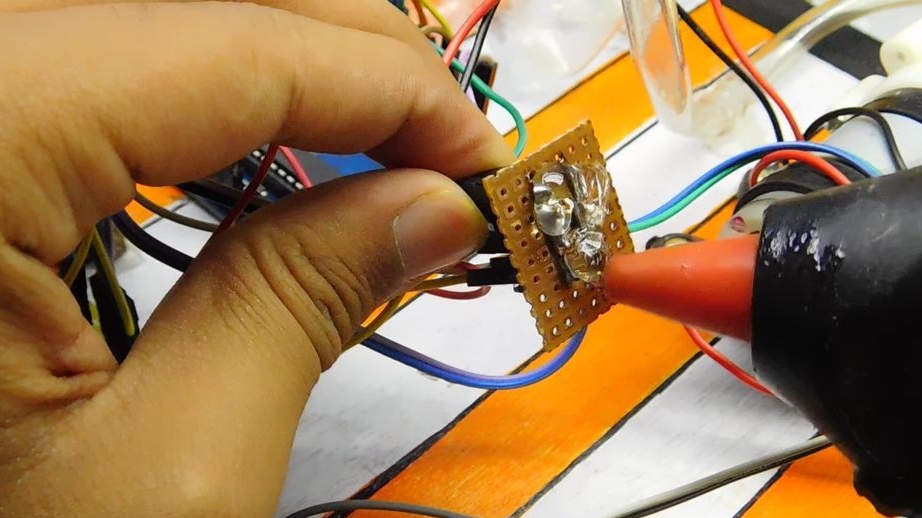
Четвърта стъпка: Транзистор
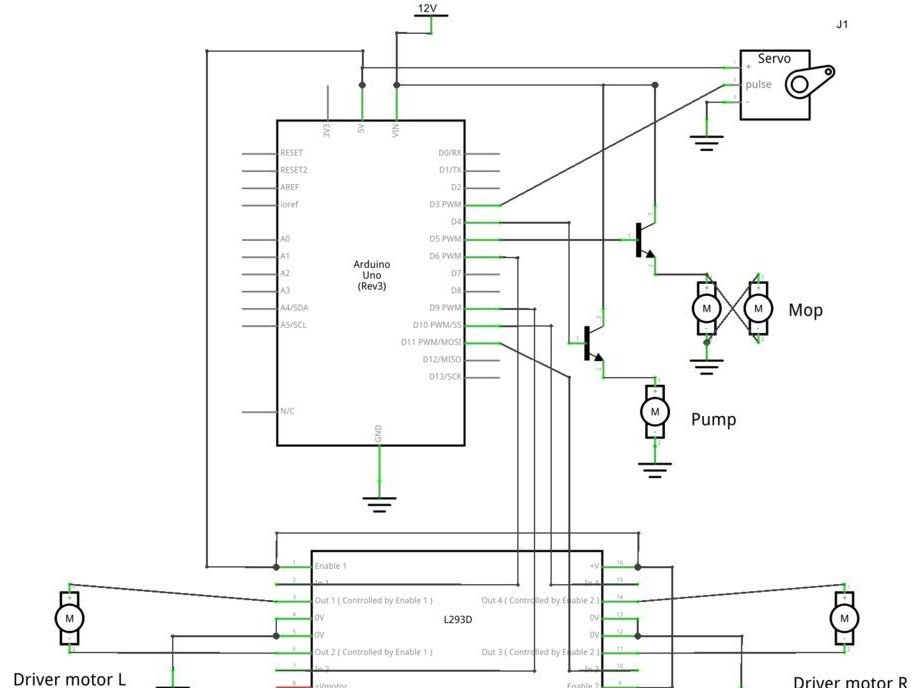
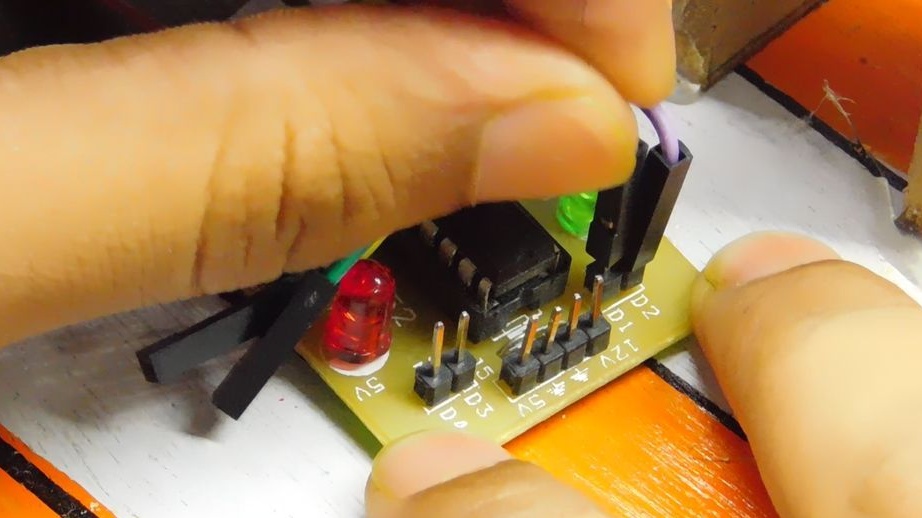
За водна помпа и двигатели е необходима мощност 12 V. Но тъй като Arduino дава само 5 V, капитанът събира веригата на TIP122 транзистора.Също така, съветникът добавя няколко + 5V и Gnd щифтове към платката.
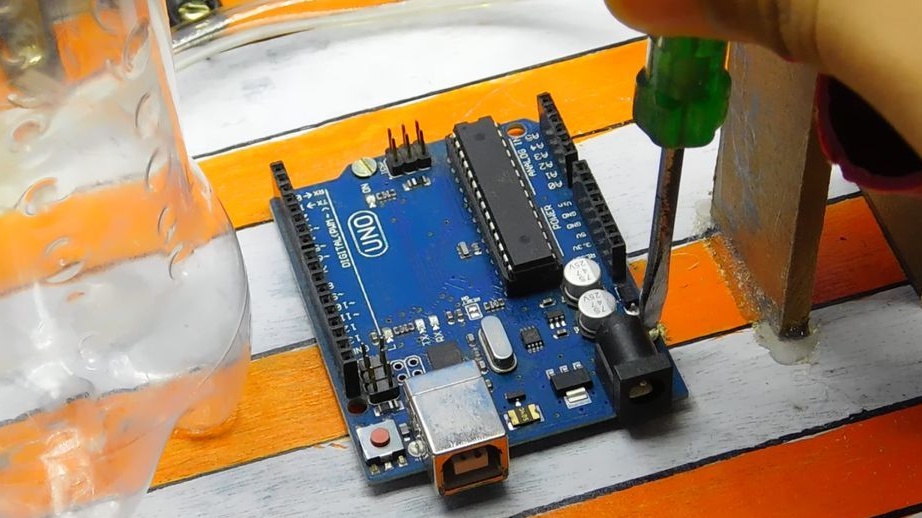
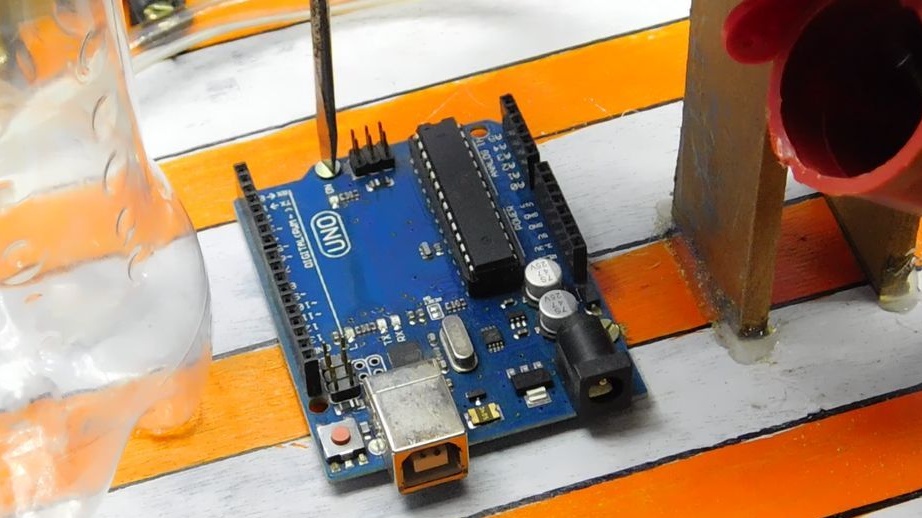
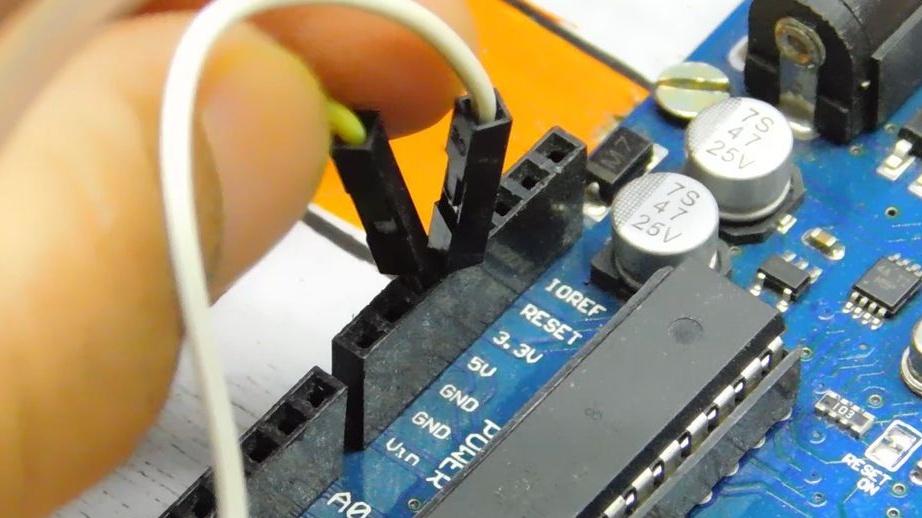
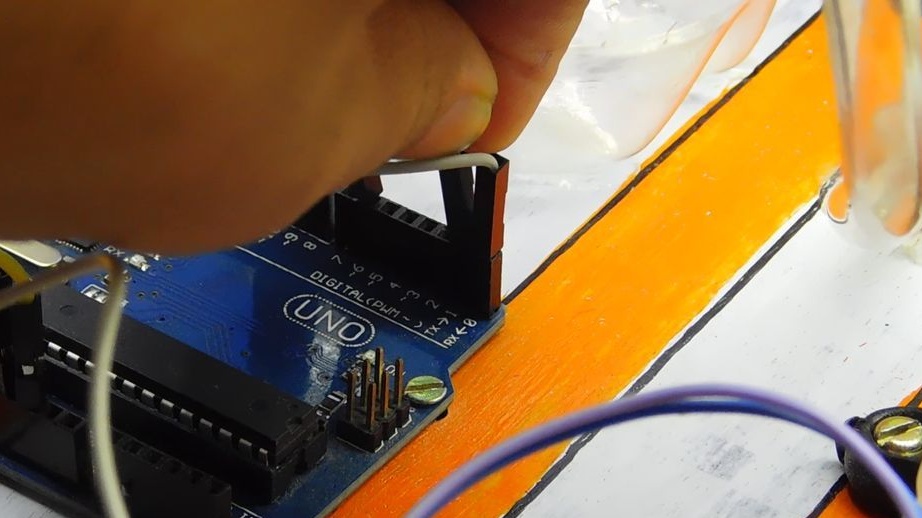
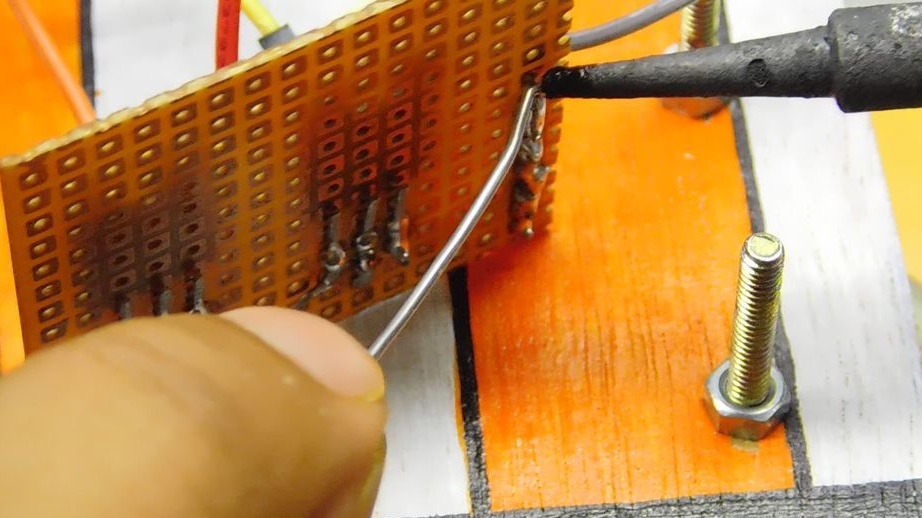
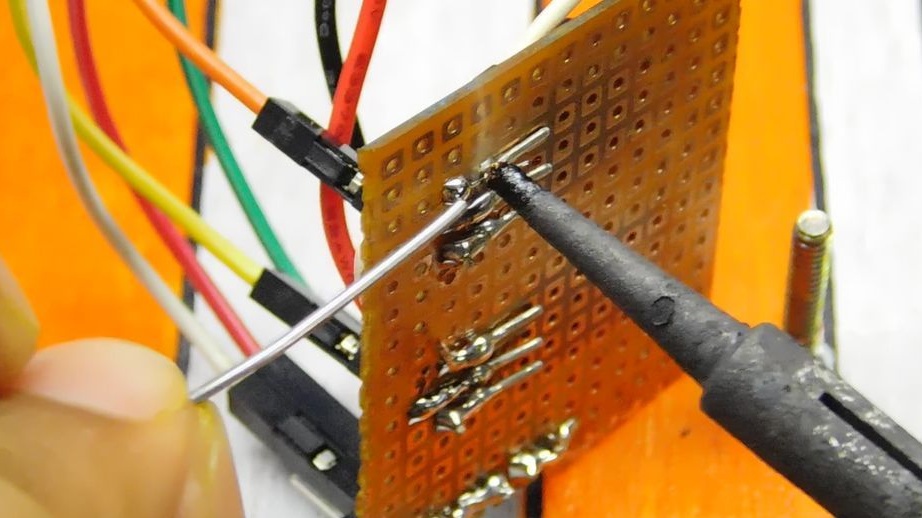
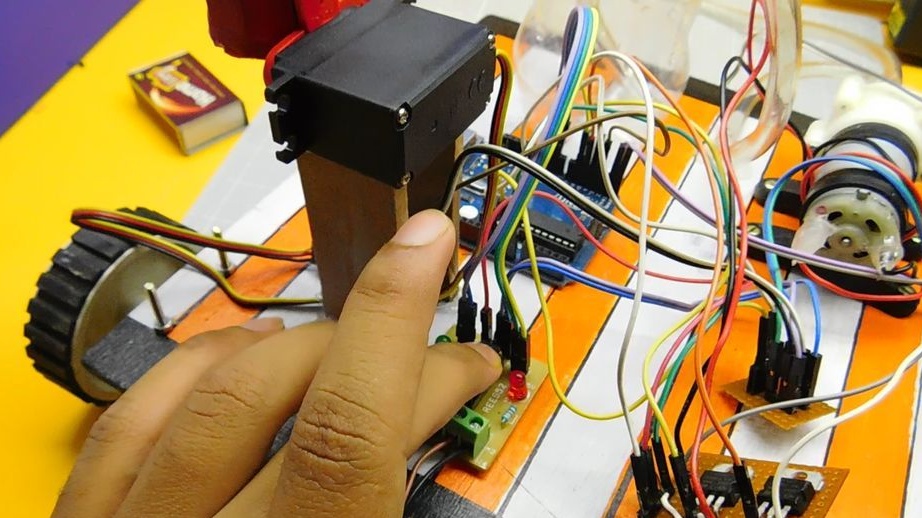
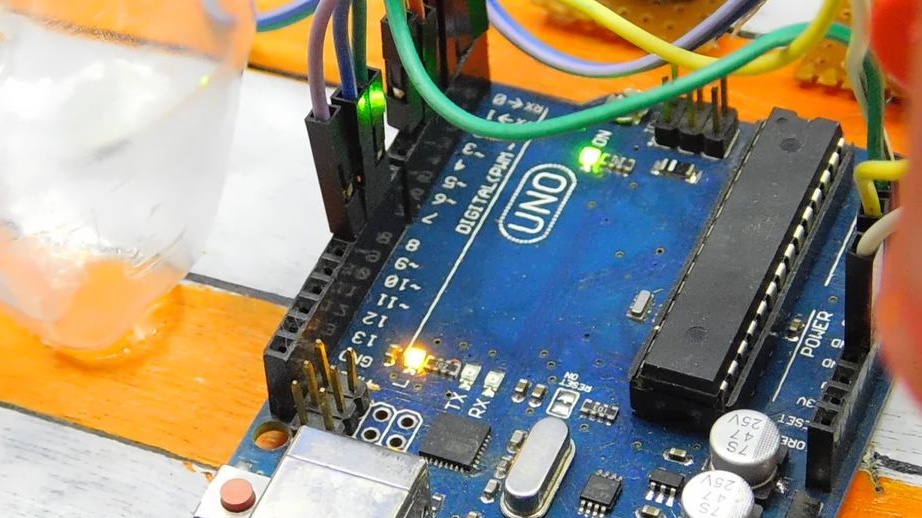
Стъпка пета: Инсталиране на веригата Arduino
Закрепя Arduino към платформата и свързва електрически устройства към платката.
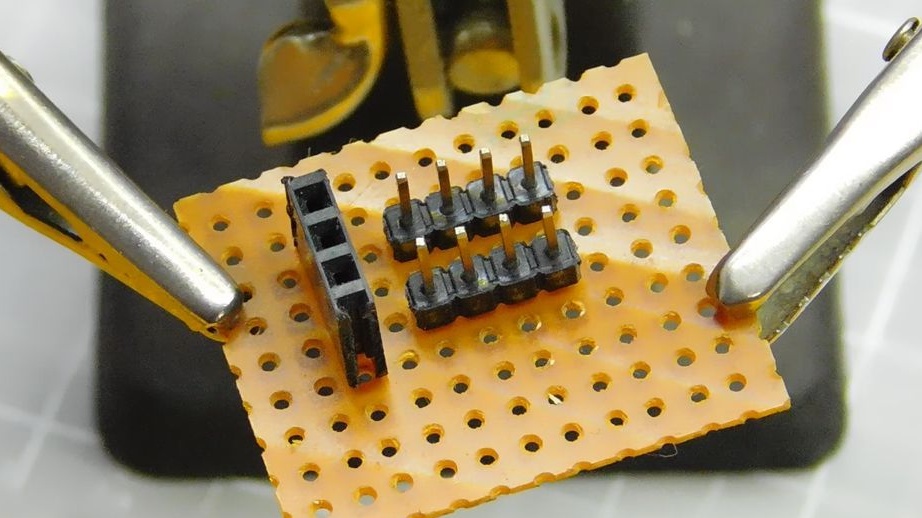
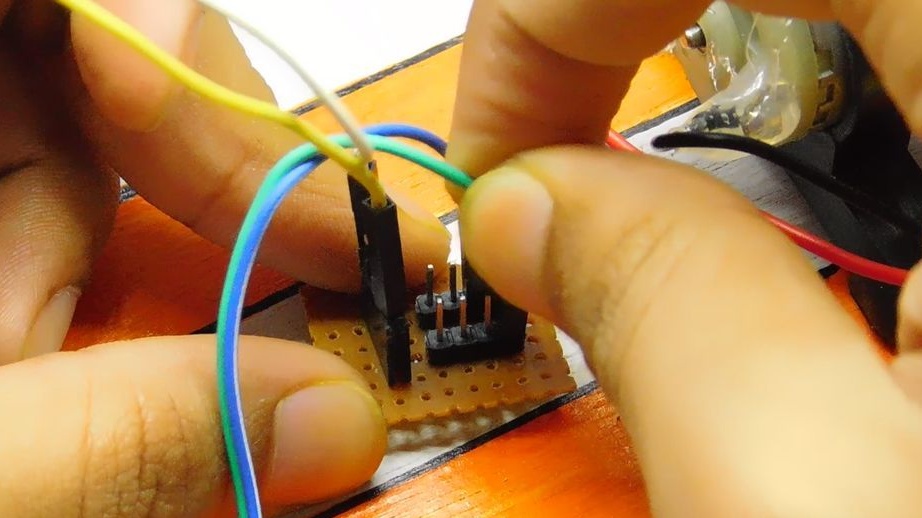
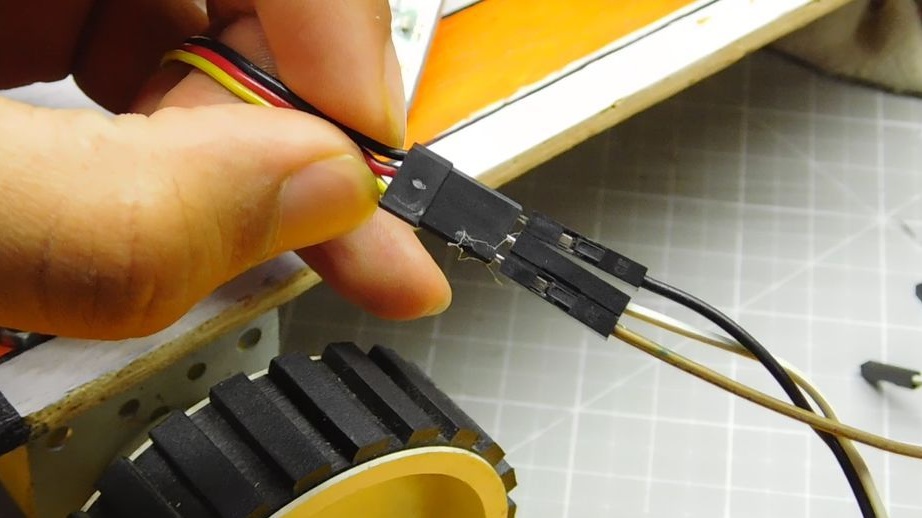
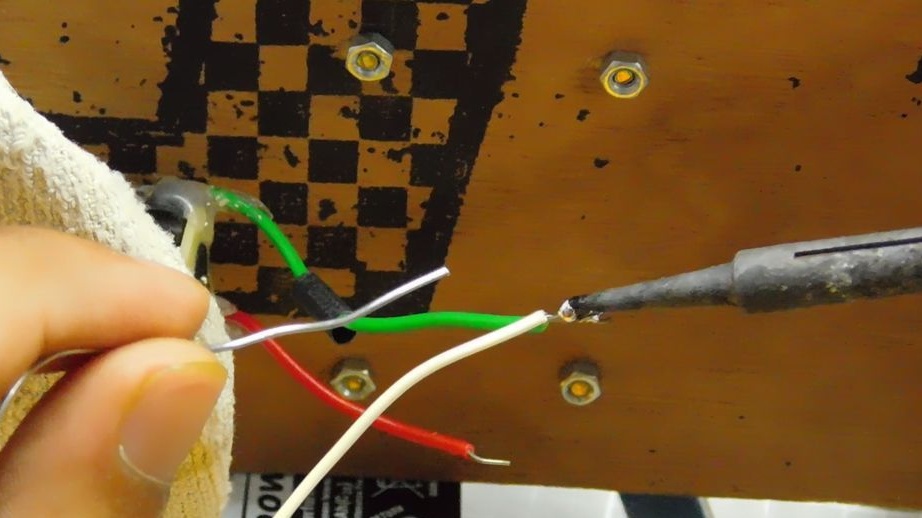
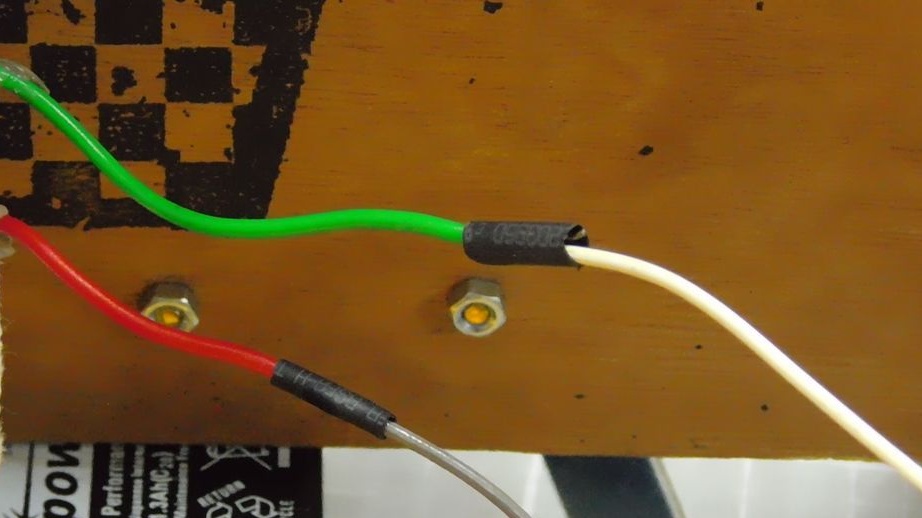
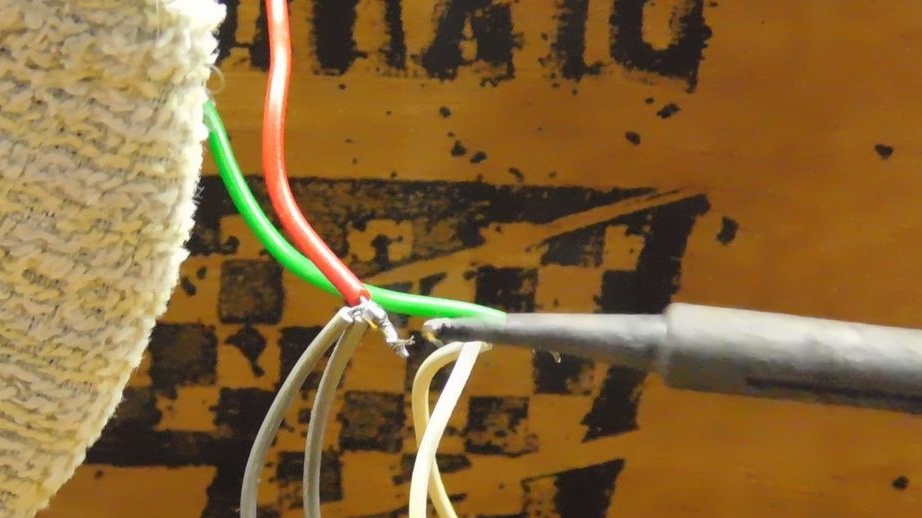
Модул за управление на двигателя.
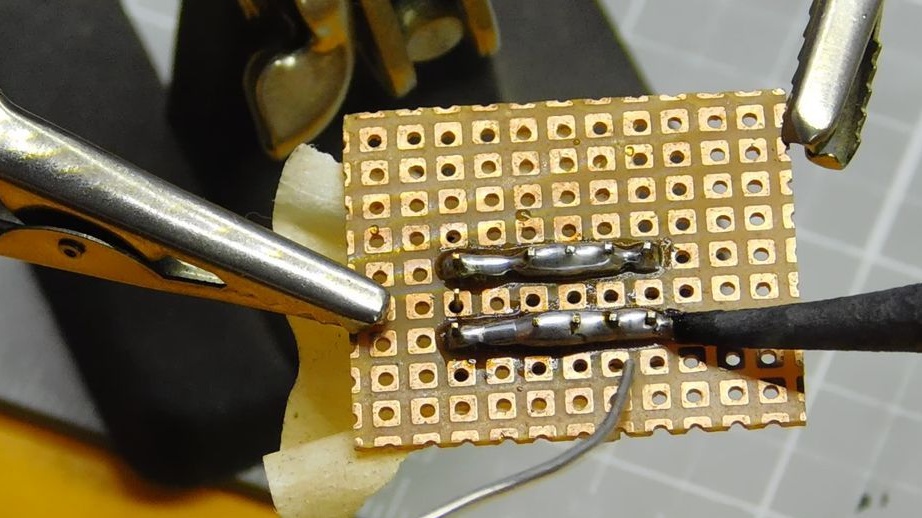
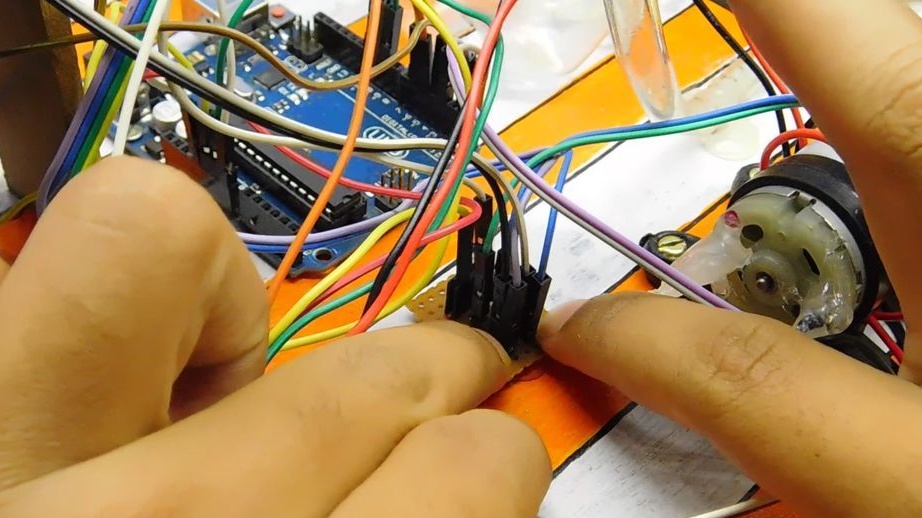
Припои към проводници (на които са фиксирани колела за движение, но не и четки). Закопчава проводниците в гнездата за монтаж на модула. След това свържете модула към Arduino, както следва.
Модул ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd -Gnd
+ 12V модул ще бъде свързан към батерията.
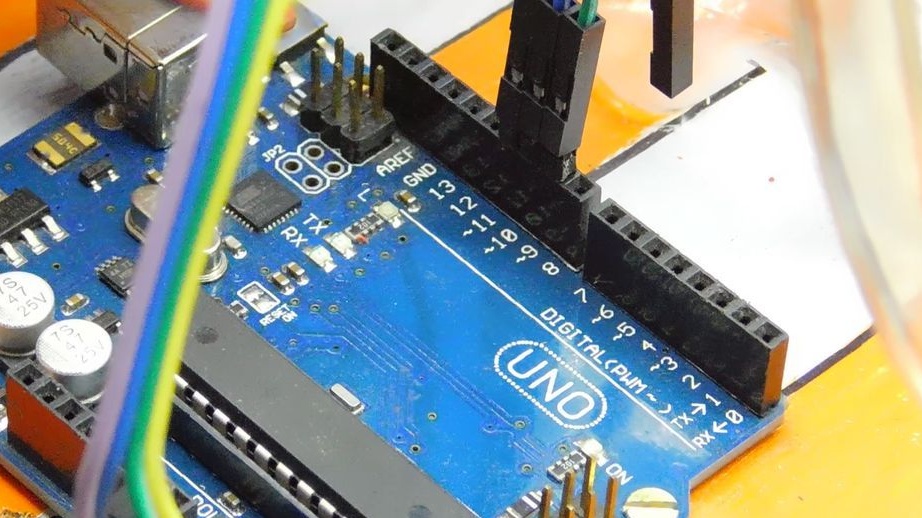
Bluetooth връзка.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Серво мотор ::: Arduino
Vcc - + 5V
Gnd - gnd
Сигнал - D3
След това свързва двигателите на помпата и четката според схемата. Моторите на четките са свързани паралелно и се въртят в различни посоки, надясно и наляво обратно на часовниковата стрелка.

Стъпка шеста: Закопчаване на части за роботи
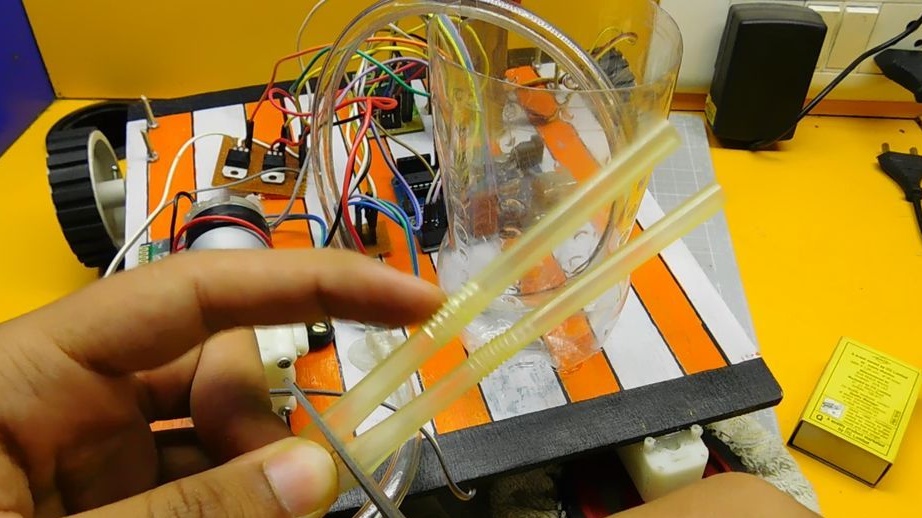
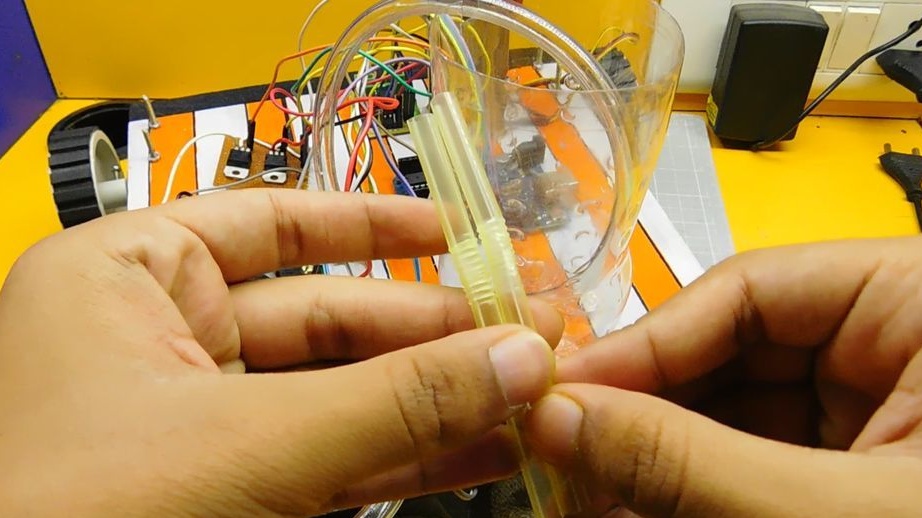
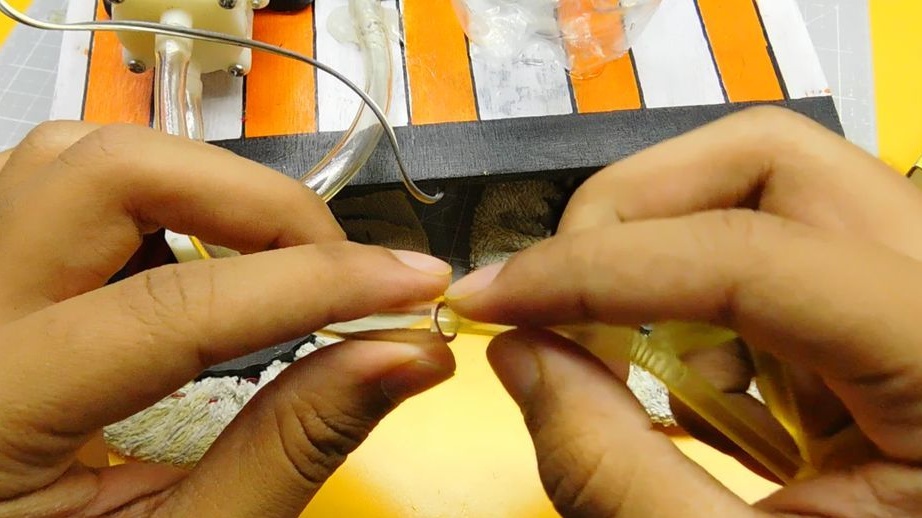
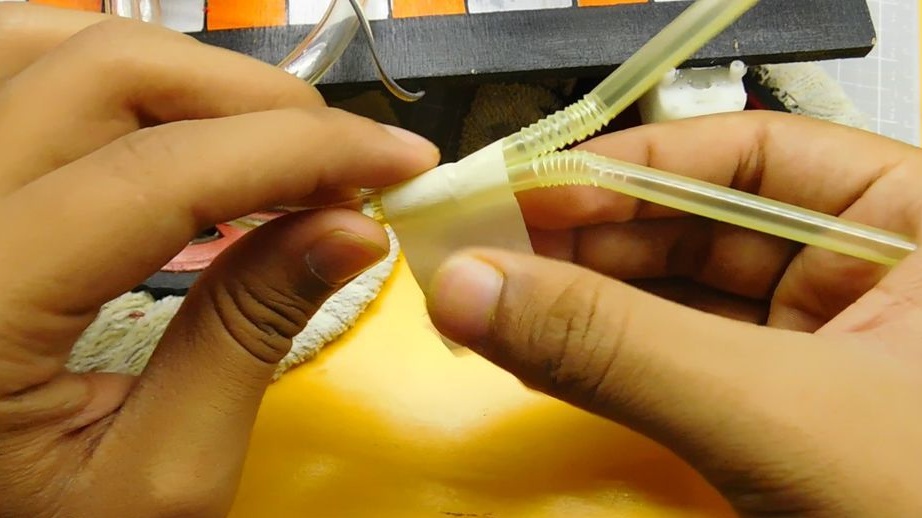
Нарязва две коктейлни сламки с размери приблизително 7 см. Вмъква сламките във водопроводната тръба. Закопчава сламки пред четки.




Брави на платформата електронен компоненти.

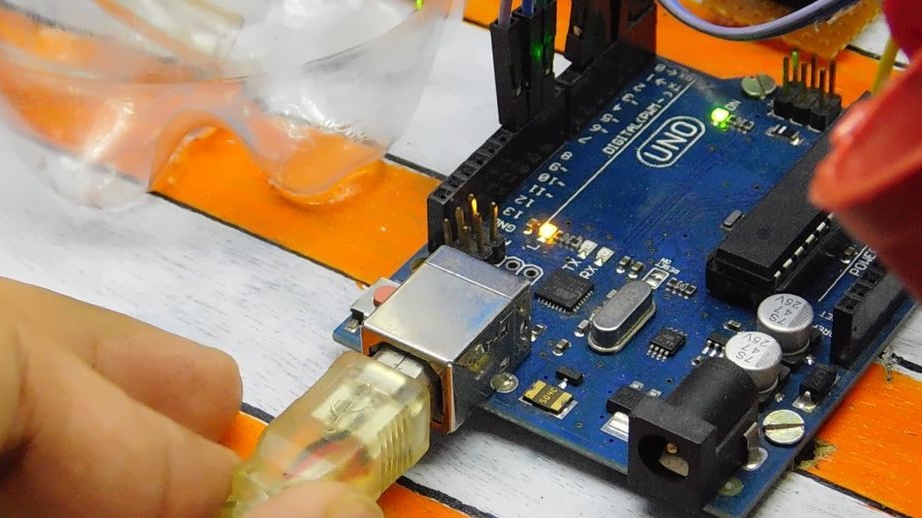
Стъпка седма: изтеглете кода
Премахва джъмперите Rx и Tx от дъската Arduino. Свързва платката към компютър. Зарежда кода. Поставя джъмперите на място. ,
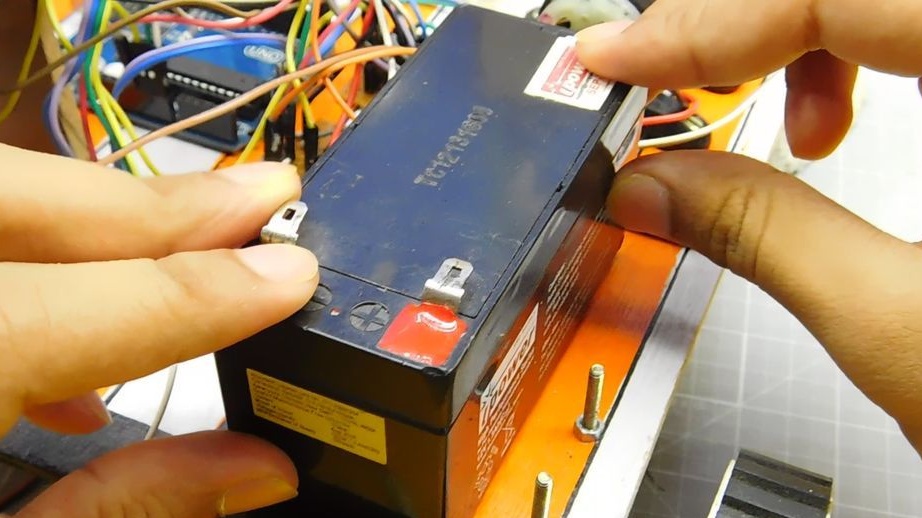
Стъпка осма: Батерия
Защитава с помощта на двустранна лента батерията на платформата. Свързва електронни устройства към батерията. Ардуино майсторът съветва да се свържете чрез разделител на напрежение. Можете също да добавите превключвател към веригата.

Стъпка девета: контролирайте робота
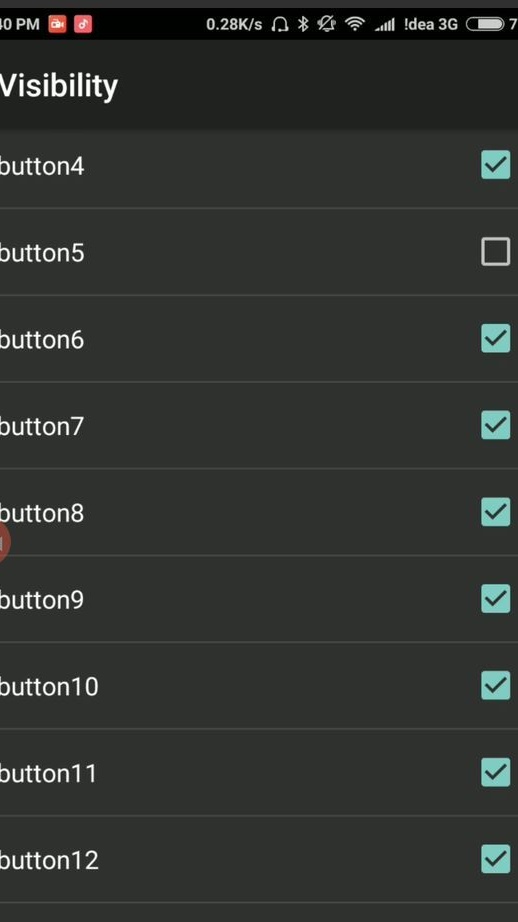
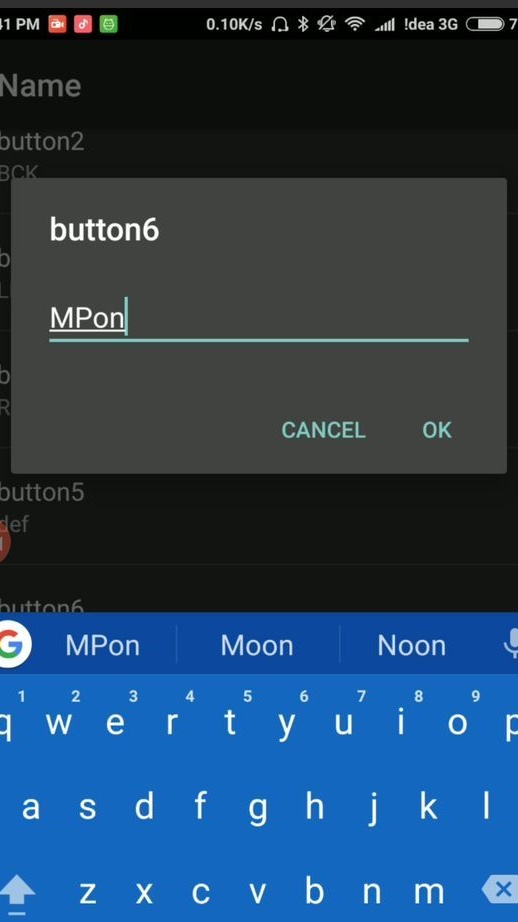
От Google Play съветникът изтегля приложението „Bluetooth сериен контролер“. Отваря приложението. Отива в настройки> видимост. Деактивира бутоните 5, 9, 12. Преминава към имена. Присвоява бутон от 2-3 букви на всеки бутон. Вижте снимката по-долу.
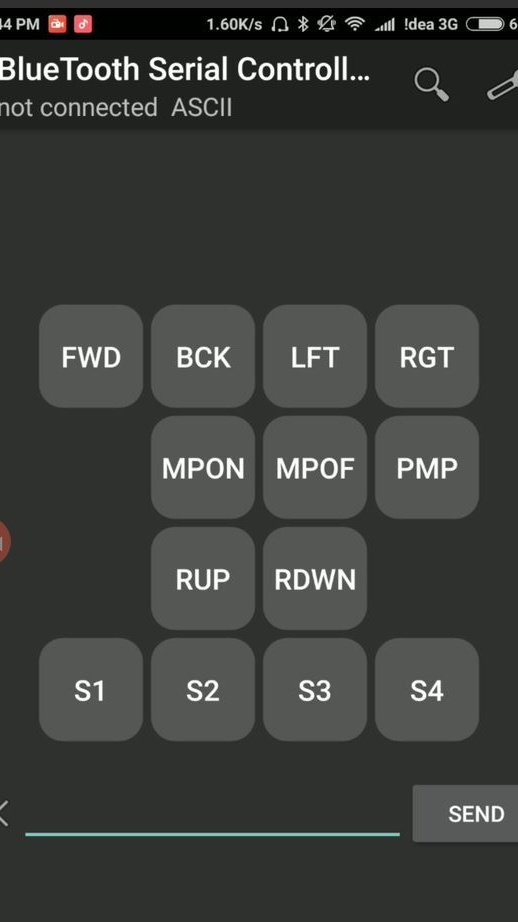
След това всеки бутон инсталира команда (кавичките трябва да бъдат премахнати, случай не се променя):
Бутон 1 (FWD): 'F'
Бутон 2 (BCK): „B“
Бутон 3 (LFT): „L“
Бутон 4 (RGT): „R“
Бутон 6 (MPON): „M“
Бутон 7 (MPOF): 'm'
Бутон 8 (PMP): „P“
Бутон 10 (RUP): „U“
Бутон 11 (RDWN): 'u'
Бутон 13 (S1): „1“
Бутон 14 (S2): „2“
Бутон 15 (S3): „3“
Бутон 16 (S4): „4“
В стоп командите> команди, присвоява команди само на тези бутони:
Бутон 1: „S“
Бутон 2: „S“
Бутон 3: „S“
Бутон 4: „S“
Бутон 8: 'p'

Сега остава да се свържете с Bluetooth модула (“HC-05”), въведете паролата (1234 или 0000) и можете да опитате да почистите стаята -)))
Благодарим на майстора-майстор и му пожелаваме да подобри робота и да получи напълно автономна работа от него.
Целият процес на сглобяване на роботочистачката може да видите във видеото.