

Добър ден, днес искам да споделя инструкции за направата на резервоар. Ще има две опции за вътрешния контролер: ESP -8266 и Arduino Pro Mini. В първата версия контролът се осъществява чрез Wi-Fi комуникации. Във втория - IR дистанционно. Той е направен на базата на TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), той се задвижва от комплект за скоростна кутия Tamiya 70097 Twin-Motor и моторите, които се доставят с скоростната кутия.
Ще ни трябва:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- моделно лепило (TAMIYA Cement например)
- комплект за скоростна кутия Tamiya 70097 Twin-Motor
- ESP 8266 -12E или Arduino Pro Mini 8MHz 3.3V
- стабилизатор на напрежение AMS 1117 3.3v 8000mA (ако е опция с ESP 8266-12E)
- Драйвер на двигателя Qifei L9110
- кондензатор 10v 1000uF
- двуцветен (червен, зелен) LED
- син LED
- 2 червени светодиода
- IR приемник
- фоторезистор
- 2 отделения за 2 AAA батерии или 4 AAA 1.2V 1000mA NI-MN батерии
- 2 резистора 2ohm
- 4 резистора 75 ома
- 6 резистора 10 kOhm (ако е опция с ESP 8266-12E)
- бутон
- фоторезистор
- USB - TTL
- поялник
- многоцветни проводници
Стъпка 1 Корпус и механика.
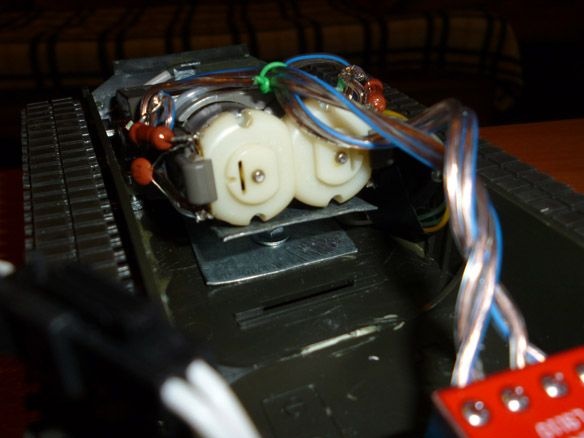
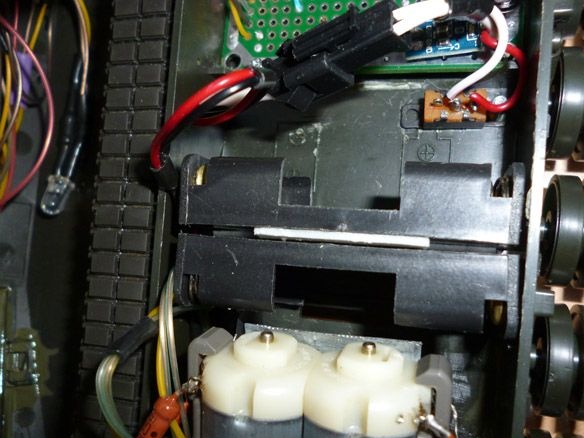
Първо трябва да съберете модела TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Лепим долната част според инструкциите, с изключение на частите, покриващи изходните отвори на валовете на скоростната кутия. Водещите звезди също не залепват. Залепете горната част според инструкциите без промени. След като залепите всичко това, оставете за сушене и продължете към събирането на скоростната кутия. Както се вижда от инструкциите Tamiya 70097 може да се сглоби в две различни версии.
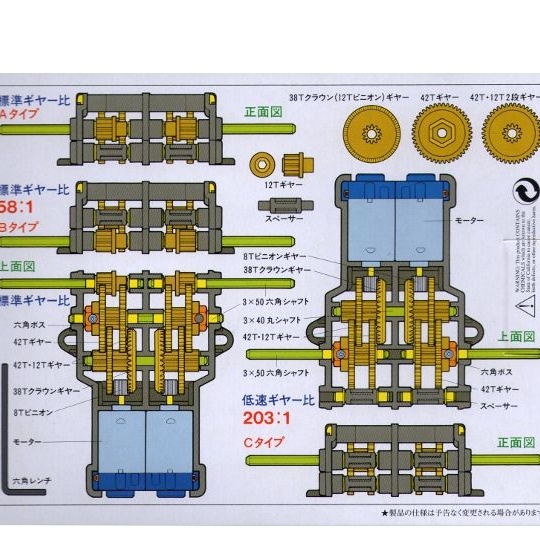
Първият вариант със съотношение 58: 1, вторият - 203: 1. Имаме нужда от първия вариант. И тук също не е толкова просто. В този случай изходът на оста може да бъде по-близо до дъното на скоростната кутия или в средата. Издишването на осите трябва да се направи в средния отвор! Сглобявайки скоростната кутия, пристъпваме към нейното инсталиране върху модела. На теория всичко трябва да е просто, тъй като както моделът, така и скоростната кутия на една фирма. На практика - скоростната кутия трябваше да се натисне там. В хоризонтално положение на скоростната кутия, валовете на задвижващите колела се издухаха нагоре, така че трябваше да отрежем метална плоча, което направи възможно фиксирането на скоростната кутия в желаното положение.

Осите на скоростната кутия ще трябва да бъдат намалени с 3 мм. След това залепете задвижващите колела върху тях.

В горната част, по-близо до гърба, правим отвори за двуцветен светодиод и IR приемник.

По-близо до предната част е отвор за син светодиод, който ще служи като фенерче.

А вътре в люка - за фоторезистор.

На обратната страна залепете червените светодиоди за осветяване.

Към всичко по-горе трябва да спойкате проводниците. По-удобно е да направите това преди инсталирането.
Стъпка 2 Електрик
Тук ще осигуря избор на опции за по-нататъшен монтаж.
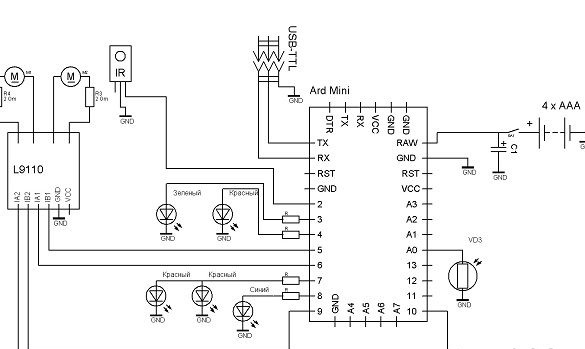
Ако сте избрали ESP 8266. Вграденият Wi-Fi модул улеснява значително процеса на контрол и връзка.Може лесно да се програмира в ID на Arduino. Най-добре е да изберете модул с 4 Mb памет. В този случай е необходимо да се събере минималната сбруя за стартиране и мигане на ESP-8266. Само VCC щифтът е свързан директно към захранването, останалите щифтове: CH_PD, RESET, GPIO0, GPIO2, трябва да се изтеглят към захранването (VCC) чрез резистор. 10kOm резистори могат да бъдат заменени с други, от 4.7kOm до 50kOm, с изключение на GPIO15 - стойността му трябва да бъде до 10k. Директно, към минуса (GND) на захранването, ние свързваме само GND и също дърпаме GPIOO през резистора до 10kOm, за да поставим модула в режим на изтегляне на фърмуера, към GND. Бутонът е необходим за рестартиране и мигане на модула. USB-TTL конектор - за фърмуер.
Ето една диаграма
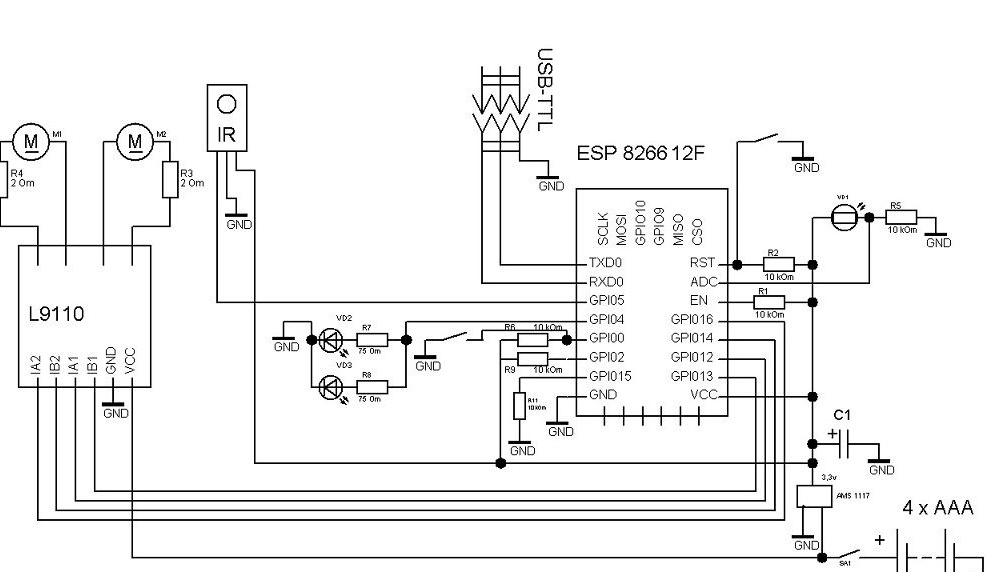
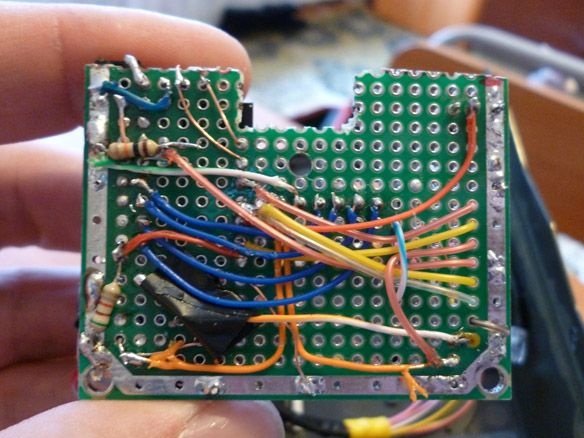
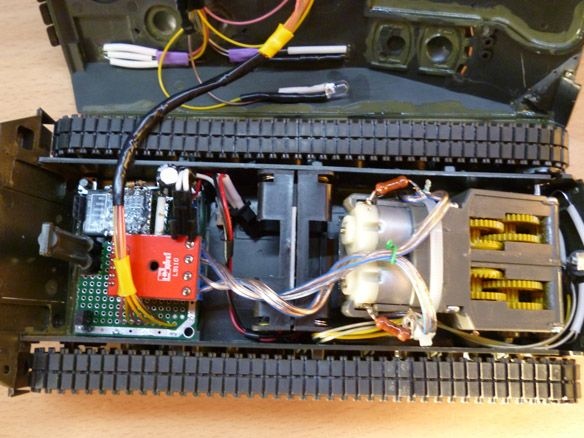
Ще обясня малко, синият и два червени светодиода са необходими за подсветка (тя е видима и красива на тъмно), фоторезисторът е свързан към ADC на контролера и е необходим за определяне на осветлението (когато подсветката затъмнява). 10 kOhm издърпващи резистори, 75 Ohm за светодиоди, 2 Ohm ограничаващи тока за двигатели (без тях, когато се опитвате да се движите, контролерът се претоварва). Ние спояваме всичко според схемата на платката. За захранване можете да използвате 4 "малки" батерии или четири батерии тип ААА, запоени последователно. Залепваме две отделения от две батерии с двустранна лента и се свързваме последователно. Отделите за акумулаторите и акумулаторите са поставени между скоростната кутия и платката.
Ако вашият избор падна върху Arduino. Вътре се побира само Arduino Pro MINI. Струва си да изберете платка от 3,3 волта, тъй като моторите са проектирани с мощност 3 волта и не искате отделно да захранвате двигателите и Arduino. Arduino е по-лесно. Целият ремък и регулатор на напрежението вече са на самата платка. Остава да разпалите гнездото Arduino и драйвера на мотора на платката.

Стъпка 3 Подготовка на програмната среда.
За да редактирате фърмуера и да попълните скицата в ESP, трябва да инсталирате Arduino IDE от официалния сайт на Arduino.cc, както и да инсталирате добавката за ESP, чрез Boards Manager. За да направите това, стартирайте Arduino IDE, след това File - Settings - в полето URL адреси на Additional Board Manager, въведете връзката
http://arduino.esp8266.com/package_esp8266com_index.jsonщракнете върху OK (можете да въведете няколко връзки, разделени със запетая в това поле). Следващи инструменти - Board - Board Board в полето на филтъра, въведете esp8266 и кликнете върху ESP8266 от ESP8266 Community Forum. Щракнете върху Инсталиране и изчакайте изтеглянето да приключи. Сега остава да изберете Board - Generic ESP8266 в менюто Tools и да настроите честотата на вашия модул на 80 или 160Mhz, размер на флаш паметта и да изберете серийния порт, към който е свързан USB-TTL адаптер.
За Arduino просто инсталирайте Arduino IDE от официалния уебсайт на Arduino.cc.
Стъпка 4 Фърмуер
Остава да редактирате скицата и да я напълните с ESP.
В полето "String _ssid =" ";" между кавичките посочвате с коя точка за достъп искате да се свържете.
"String _password =" ";" е паролата за тази мрежа.
"String _ssidAP =" Mardella ";" името на мрежата, която ESP ще повиши, ако не се свърже със съществуващата.
"String _passwordAP =" 12345678 ";" - паролата на мрежата, която ESP ще повиши, ако не се свърже със съществуващата.
"String SSDP_Name =" Mardella ";" Име на SSDP
След стартиране ESP се опитва да се свърже с точката за достъп, посочена в скицата, ако е успешна, трябва да определите IP адреса на нашия робот и да се свържете с този адрес чрез браузър. Можете също да преминете през компютър до мрежовата инфраструктура, да намерите резервоара там и щракнете двукратно, за да се свържете с него. Ако връзката не успее, ESP става точка за достъп. Тогава достъпът може да бъде получен чрез свързване към нова точка за достъп и въвеждане на 192.168.1.1 в браузъра.
Уеб интерфейсът се състои от две страници. Първият, който контролира. Втората е за персонализиране. На втората страница можете да посочите точката за достъп, към която искате да се свържете, както и името на резервоара и името и паролата на точката за достъп, която ESP повишава. Всички промени влизат в сила след рестартиране. Можете също да рестартирате модула чрез уеб интерфейса.
За Arduino трябва да редактирате всички полета „results.value“. След като запишете IR кодовете на конзолата, които ще използвате там.

Видео tanchika: