

Статията ще разгледа пример за създаване на легендарен робот, наречен "Canbot". По-голямата част от детайлите за робота е отпечатана на 3D принтер. Роботът се управлява дистанционно.
Материали и инструменти за домашно:
- Един микроконтролер Atmel Attiny85;
- две микросервизи HXT900 или техните аналози;
- една 3.7V LiPo батерия;
- един инфрачервен приемник на 38kHz;
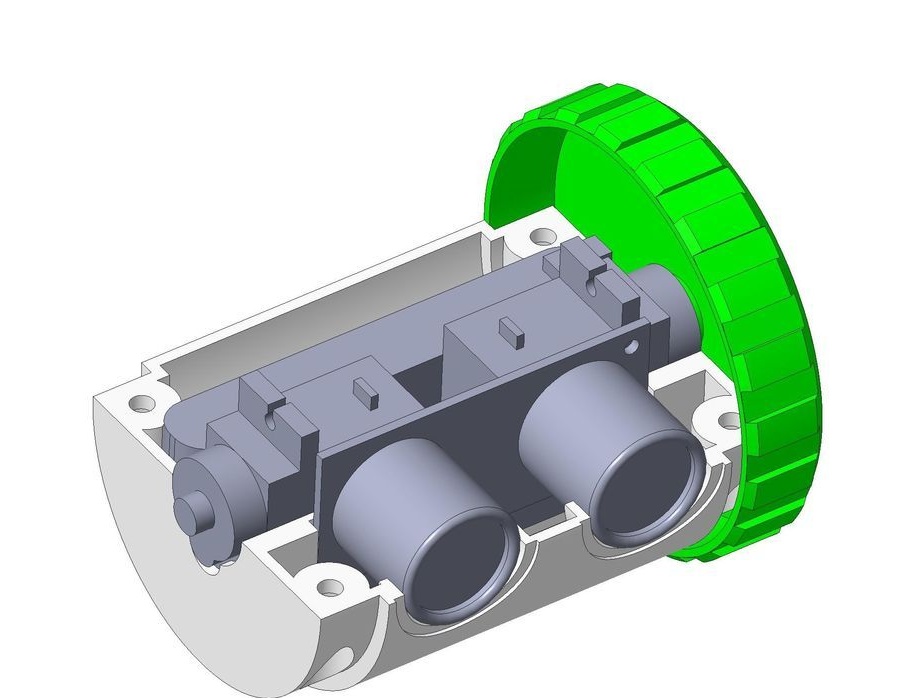
- ултразвуков преобразувател тип HC-SR04;
- Вместо това 9x4mm превключвател или джъмпер;
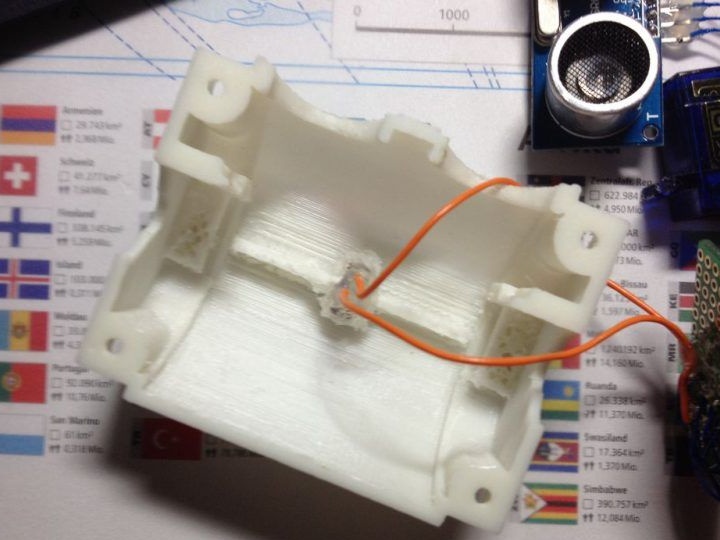
- 3D части (възможно). Това ще отнеме един връх (top.stl), едно дъно (bottom.stl) и две колела (wheel.stl).
Разбира се, ще са необходими инструменти за запояване, горещо лепило, отвертки, винтове, проводници и други малки неща.

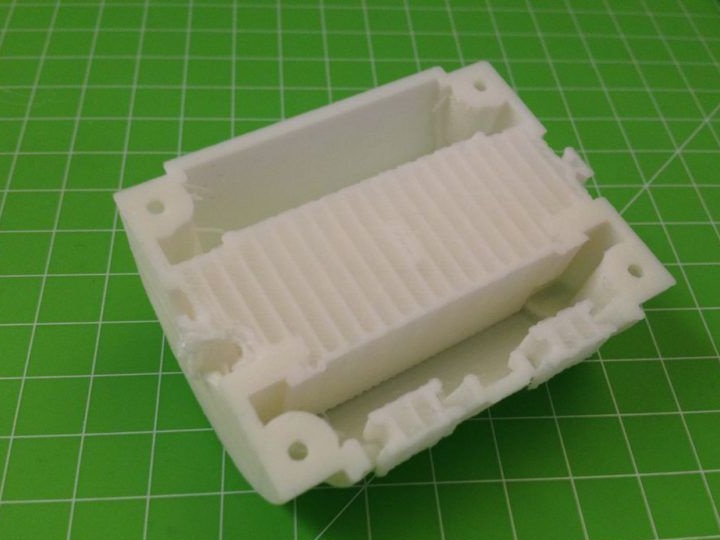
Горната и долната част ще трябва да бъдат отпечатани плоско отстрани с помощта на опцията „носещи конструкции“. В зависимост от това какъв тип принтер е бил използван, завършените части може да се наложи да бъдат почистени в края.
Производственият процес на робота:
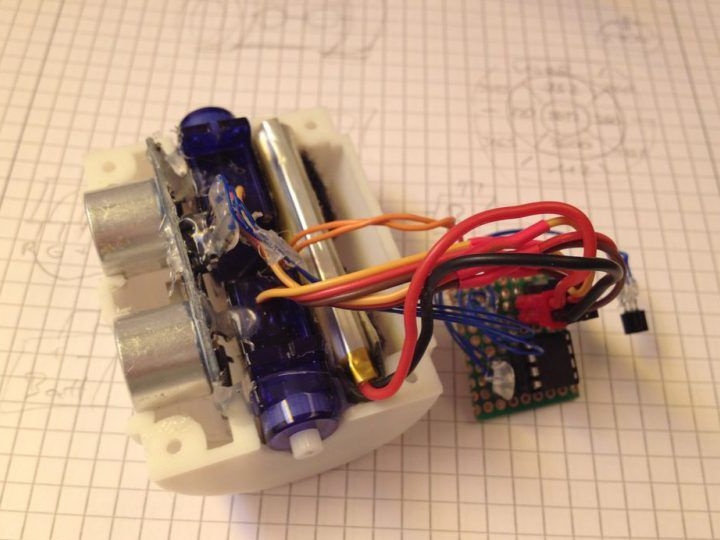
Първа стъпка. електронен част от робота
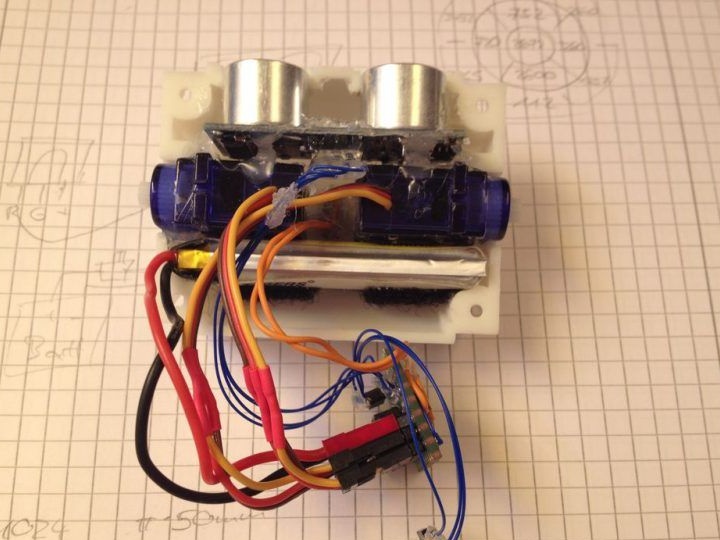
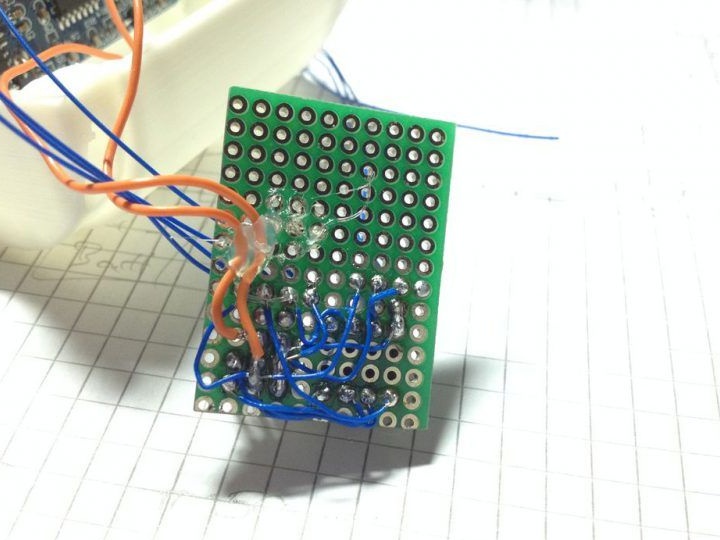
Първо трябва да конфигурирате сервовете, те трябва да бъдат преобразувани в непрекъснато въртене. Как да направите това, в интернет има много инструкции. Е, тогава всички електронни елементи ще трябва да бъдат сглобени, както е посочено в диаграмата. За да сглобите електронната част беше удобно, можете да вземете малко парче от дъска, както и тънки проводници.


Стъпка втора Софтуерната част на робота
Ако подходите към процеса на създаване на робот с най-висок професионализъм, тогава софтуерната част може да бъде написана независимо. Но за това ще трябва да научите език за програмиране. В по-проста версия можете да изтеглите готов код и просто да го качите на микроконтролера.
Според автора най-добрият роботът получава инфрачервени сигнали от дистанционното управление на марката Sony. В бъдеще ще е необходимо да се „прекроят“ отново кодовата част Arduino и извеждате данните чрез функцията Serial.print (). В резултат на това ще бъде възможно да разберете какво кодиране е на всеки бутон.
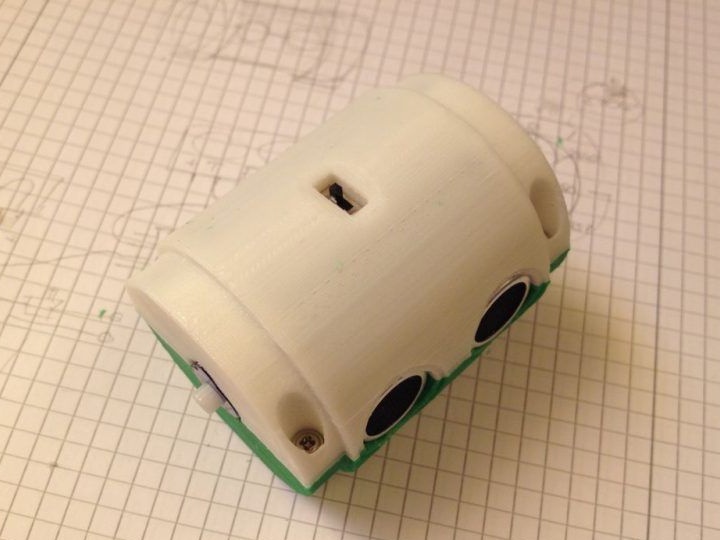
Стъпка трета Последният етап. Сглобете робота
Е, в заключение, роботът върви. За тези цели ще ви трябва горещо лепило. С него е необходимо да фиксирате проводниците, така че да не се разпадат, когато роботът се движи.Също така е необходимо да фиксирате превключвателя и добре да фиксирате ултразвуковия сензор. В заключение, капаците на робота са свързани с помощта на четири винта, в резултат на това, ако е необходимо, той може лесно да се разглоби. Между другото, винтовете за сервохранилищата са идеални за монтаж.

Това е всичко, сега роботът е почти готов. Остава да инсталирате колелата върху сервомоторните валове и можете да започнете да тествате робота. Можете да видите по-подробно как домашно работи на видеото.