По време на образованието си авторът игра на игри с поддръжка на акселерометър на телефона си. Той наистина харесваше да кара кола по телефона, просто като се накланя, а след това започна да мечтае да направи кола със същия контрол в реалния живот. Сега като Arduino и придобивайки умения за програмиране, е време да създадете управлявана машина на Android, той я нарече Херкулес.
Тя получи това име заради огромния въртящ момент и високата скорост. модел може да се управлява с Android телефон чрез Bluetooth. Всеки телефон с тази операционна система е подходящ за управление, авторът не ограничава едно дистанционно управление. Също така с помощта на телефона спестете пари, защото не ми се наложи да харча пари за създаване на дистанционно управление.
Материали и инструменти:
- Ардуино Уно
- Bluetooth приемопредавател
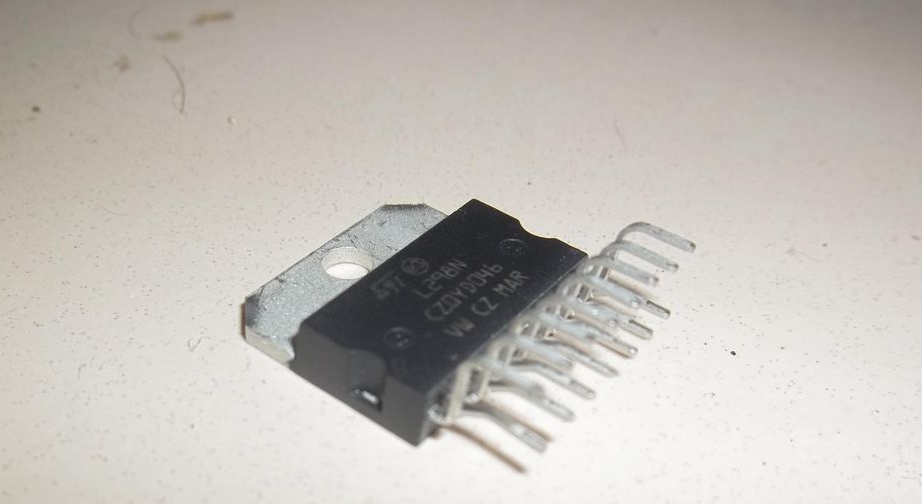
- Двоен драйвер на двигателя (с L298 H-мост)
- Мотори с предавки 4 бр (мощността се избира в зависимост от приложението на машината)
- Колела 4 бр
- Батерия 1Ah SLA 12V
- Основа за компоненти (шаси)
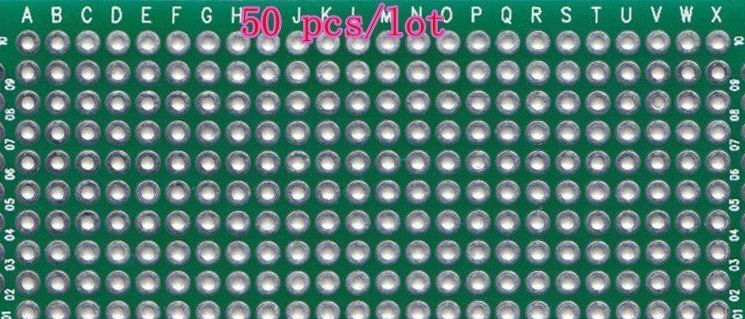
- дъска
- Кутии за корпус 4 бр
- SPST превключвател
- Свързване на проводници за Arduino
- проводници за запояване
- Гайки и винтове с малък размер
- Резистор 10 kOhm 1 бр
- Резистор 20 kOhm 1 бр
- Android телефон
- поялник
- спойка
- паста за спойка
- тренировка





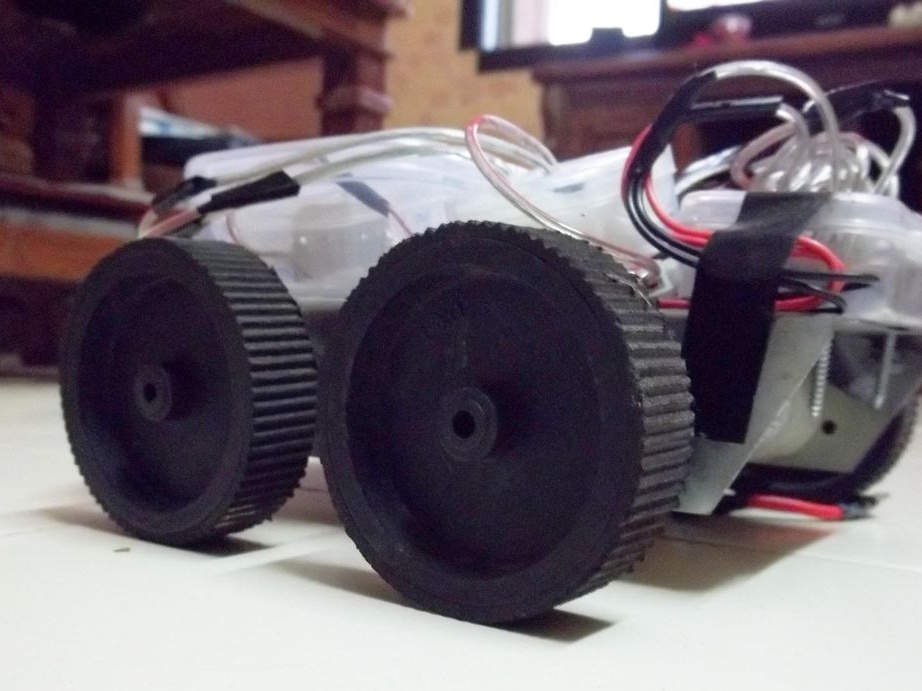
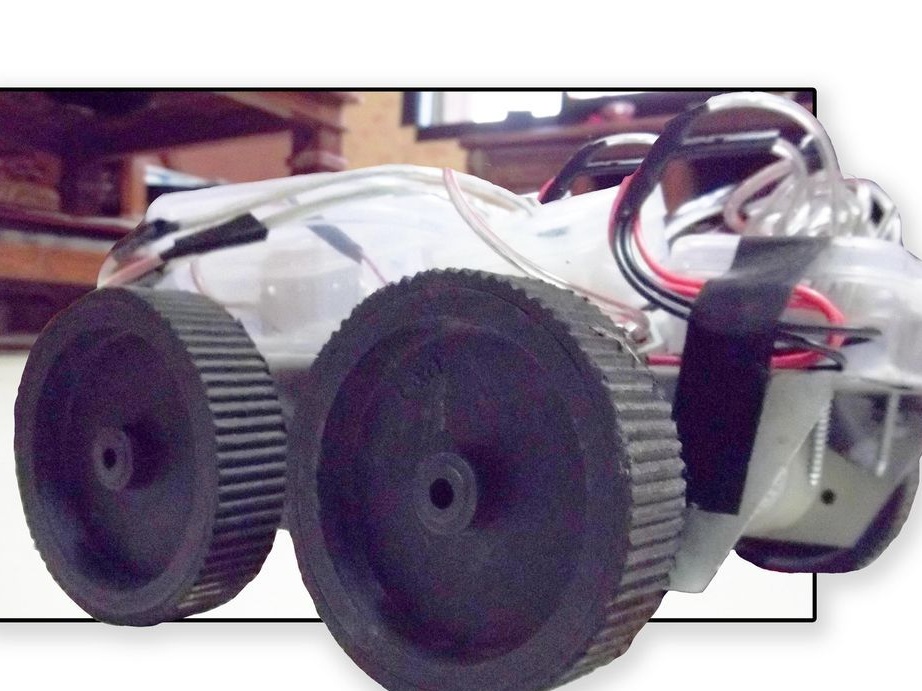
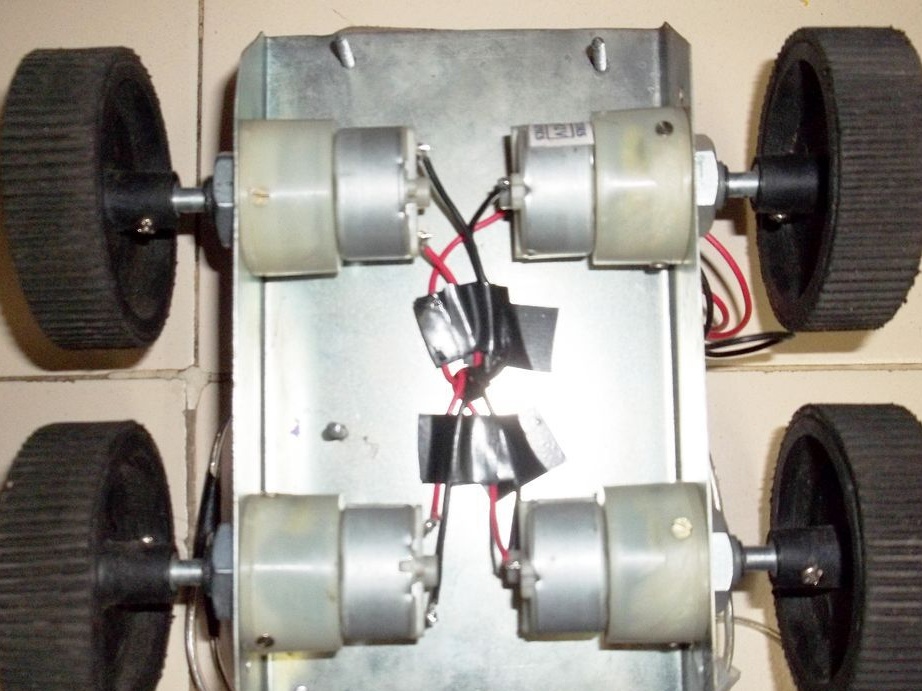
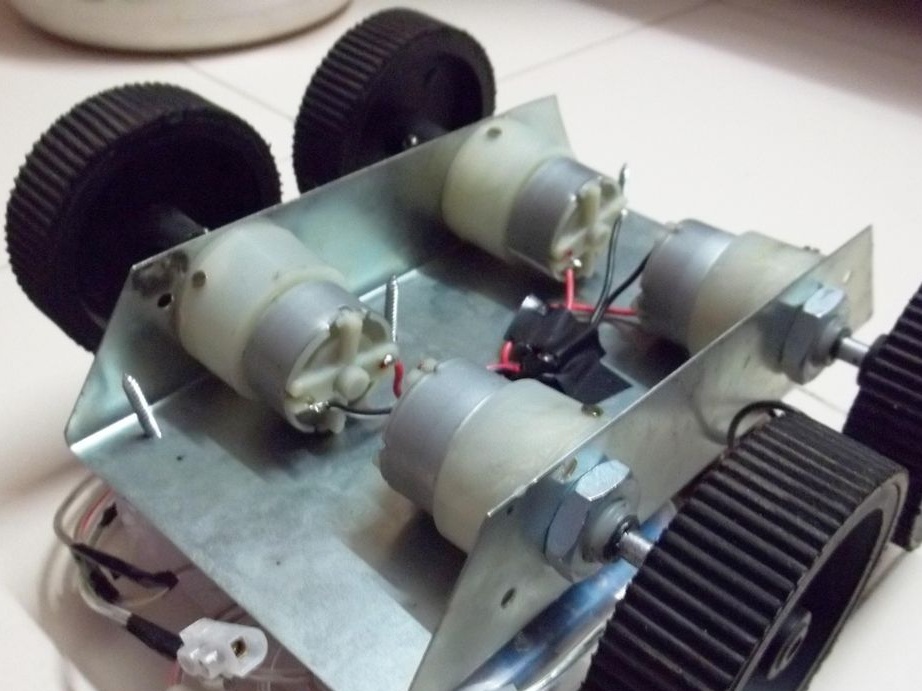
Първа стъпка. Колела и шаси.
Винтовете на двигателя улесниха инсталирането им на шасито с помощта на гайки. Колелата са монтирани по целия път до вала на двигателя. Два десни мотора са включени паралелно един с друг, както и два леви. Как изглежда шасито след инсталирането на четири колела и двигатели, можете да видите на снимката по-долу.
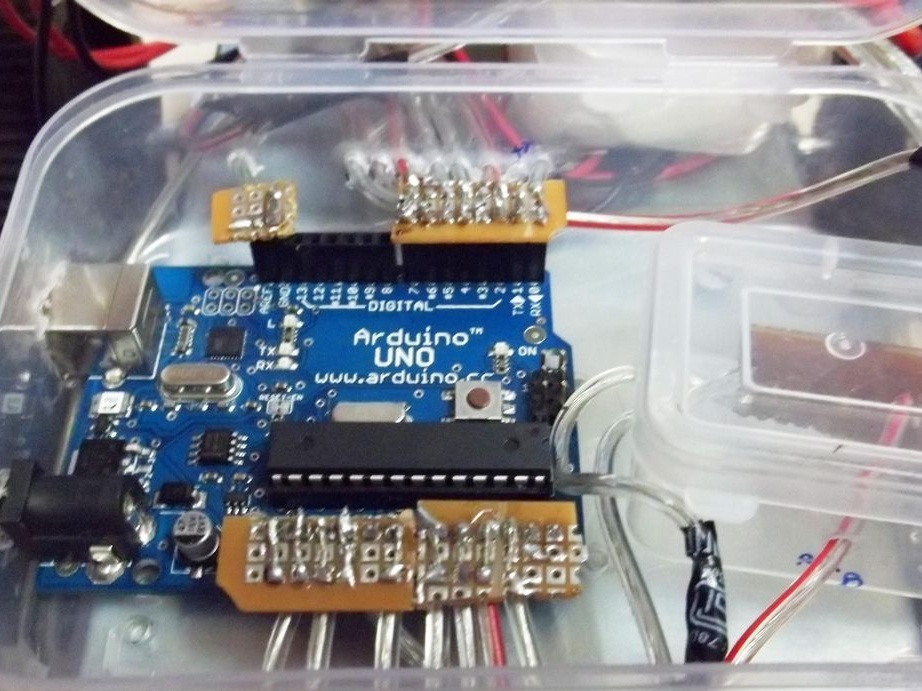
Стъпка втора Корпус за Ардуино.
Схемата на случаите за Arduino е разделена на няколко части. Такова модулно дизайнерско решение ще помогне в бъдеще да поддържа веригата или да елиминира възможна неизправност. Ако един от компонентите се разпадне или изгори, тогава той може да бъде заменен бързо и без да се нарушава дизайна. Кутията за Arduino е създадена, както следва:
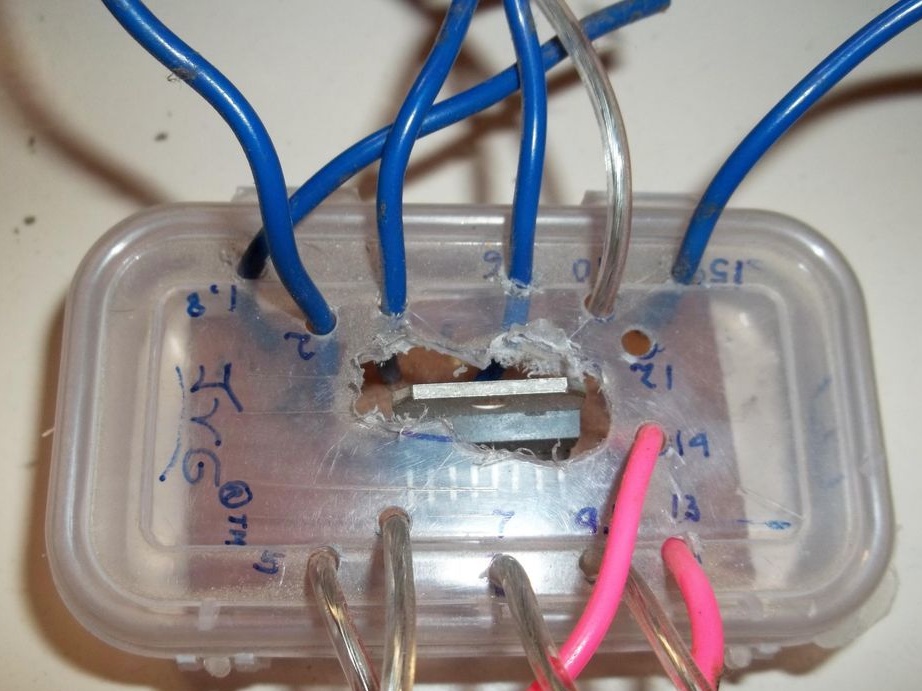
- Четири части бяха изрязани от дъската, две от тях с отвори с размери 8х3, вторите две части 6х3.
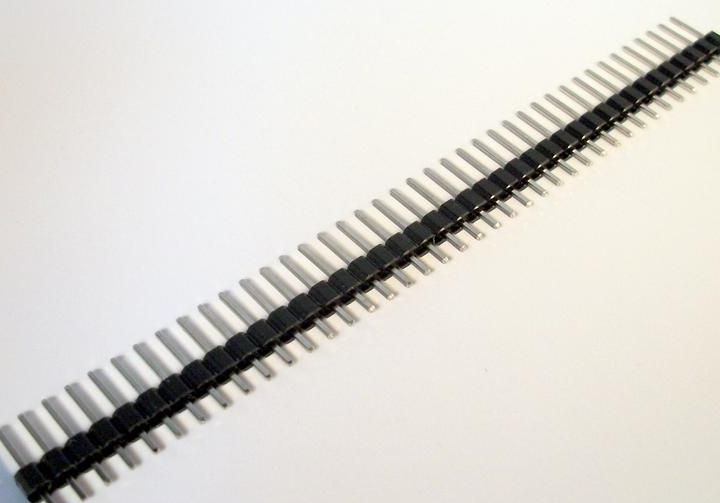
- BLS щифтове бяха запоени към всяка дъска от дългата страна.
- Всеки щифт на дъската беше допълнително споен с жици с дължина около 10 см. Това беше направено така, че проводниците да не слизат от Arduino, защото сега натоварването започна да се разпределя равномерно.
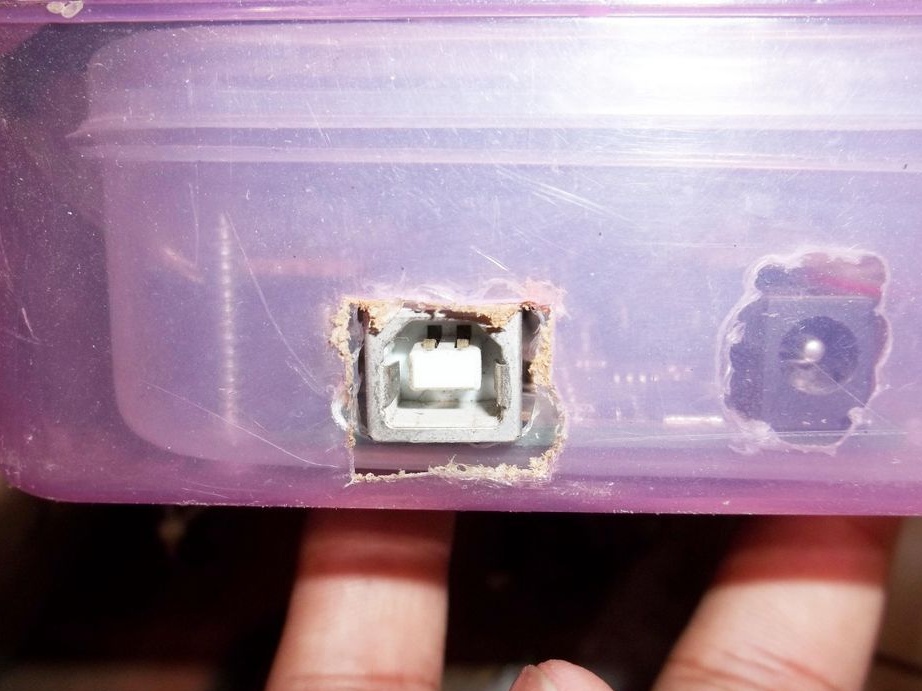
- След това платката Arduino беше поставена в кутията, така че USB изходът да докосне стената. За този изход беше изрязан отвор, това ще помогне да се заредят допълнителни програми в машината или да се направят корекции на съществуващите. Отстрани на кутията бяха изрязани дупки за проводниците, които ще отидат от дъската. В долната част на кутията бяха изрязани допълнителни отвори под монтажните конектори Arduino.


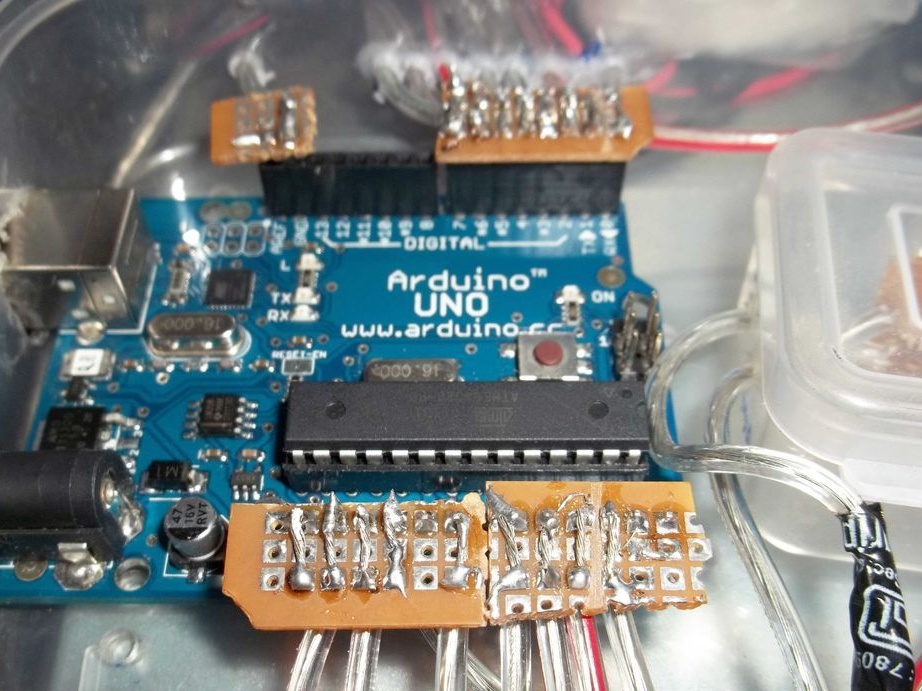
Стъпка трета Bluetooth приемопредавател.
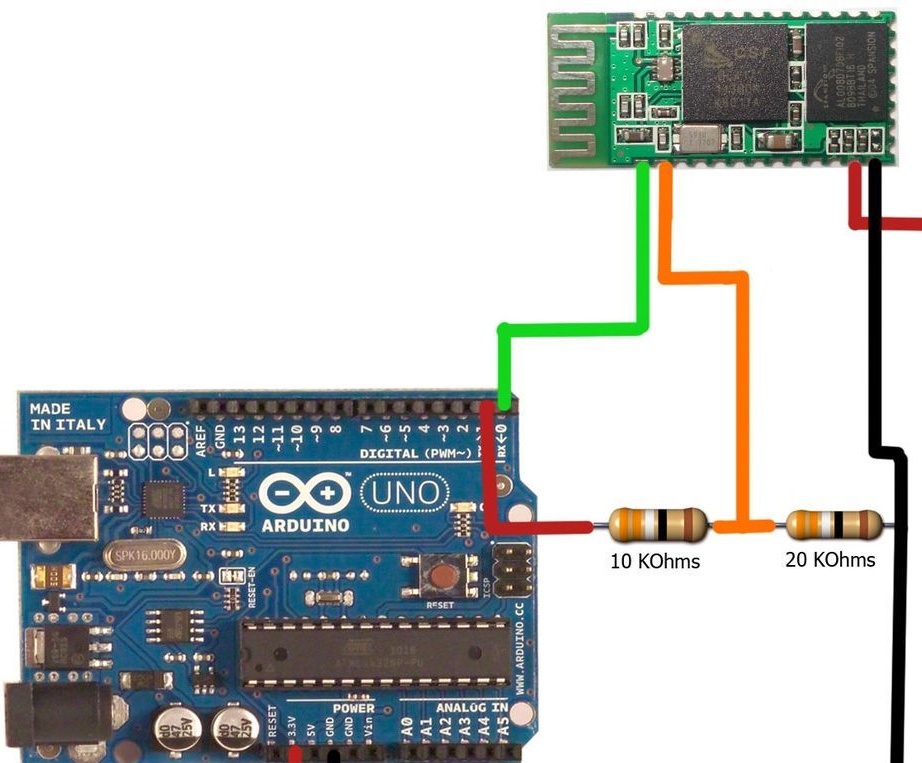
Запояване на проводници към Bluetooth приемо-предавател е най-трудната задача при сглобяването на този проект, на автора наистина липсва трета ръка при запояване. Използвани са четири проводника с дължина 10 cm, които са споени с щифтове 1 (Tx), 2 (Rx), 12 (+ 3.3B) и 13 (GND). Сега трансивърът може да бъде поставен в корпус с предварително подготвени отвори за проводниците. Авторът залепи проводниците към кутията, за да предотврати разкъсването на проводниците от контактите.



Четвъртата стъпка. Корпус за резистори.
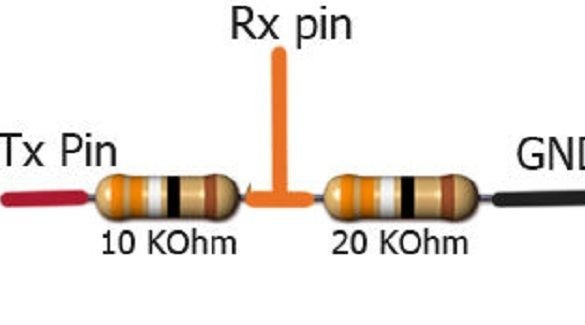
Поради факта, че изходът на Arduino Tx изпраща сигнал с напрежение 5V, а Bluetooth модулът работи с напрежение 3.3V, беше необходимо да се преобразува 5V в 3.3V. За тази задача авторът използва разделител на напрежението. Според схемата, предоставена по-долу, той спойка резистор към останалото парче от дънната платка. Разбира се, беше възможно да се постави тази схема в случай на Arduino, но нямаше достатъчно място, така че авторът направи отделен за резисторите.


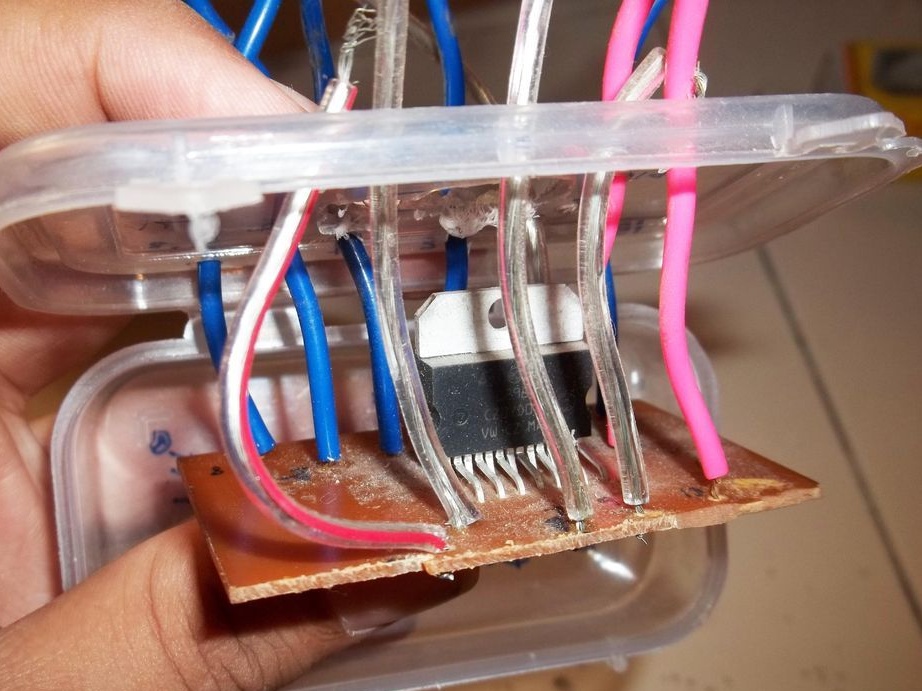
Стъпка пета Двигател на двигателя.
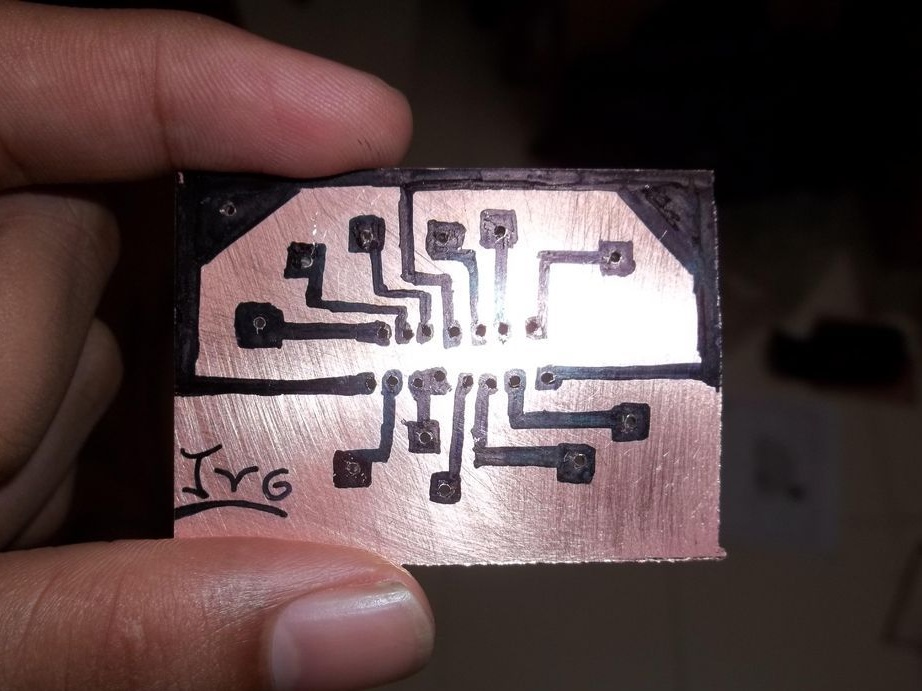
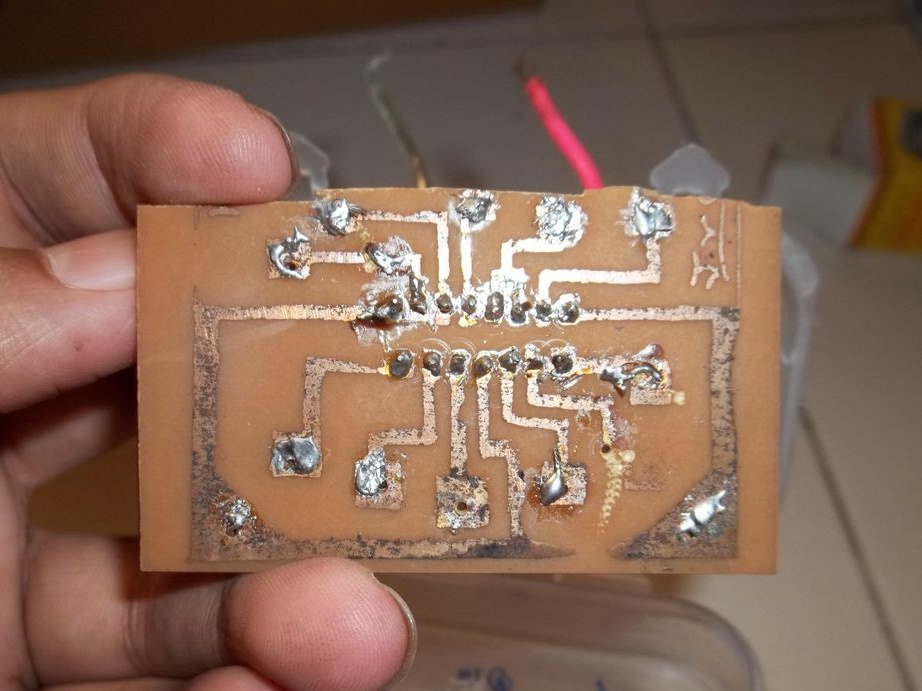
Авторът използва двоен драйвер с H-bridge L298 IC, той управлява четири двигателя. За него авторът създаде платка, за да улесни запояващите проводници към него, самата дъска на снимката по-долу. След запояване водачът също е поставен в отделен калъф с отвори за проводниците.
Стъпка шеста Последният монтаж.
Всеки отделен компонент е свързан към Arduino в съответствие със схемата.
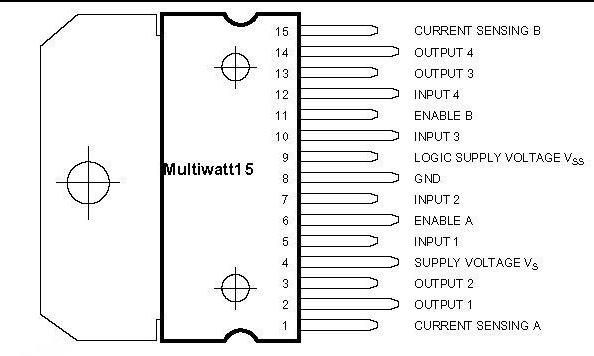
Свързването на шофьора на двигателя с Arduino се осъществи в съответствие с този разрез:
1 до БНД
2 към първия контакт на левите двигатели
3 към втория контакт на левите двигатели
4 до 12V батерия
5 за закрепване на Arduino 2
6 към щифта Arduino 3
7 за закрепване на Arduino 4
8 до БНД
9 до 5V с Arduino
10 за закрепване на Arduino 5
11 за закрепване на Arduino 6
12 към щифта Arduino 7
13 до първия контакт на десните мотори
14 към втория контакт на десните мотори
15 до БНД
12V захранване беше свързано към щифта Vin Arduino и щифт 4 на L298. GND Arduino съответно към GND захранване.
Седма стъпка. Програма за Ардуино.
За да работи програмата правилно, беше необходимо да се инсталира библиотеката на Amarino, която може да бъде изтеглена. Можете да изтеглите изходния код за Arduino под статията.
Стъпка осма Софтуер за Android
Amarino Library е инструментариум за работа със смартфони с Android. Инсталирайки допълнително приложение на телефона си, можете да започнете да пишете програма.
Приложението и приставката на Amarino могат да бъдат изтеглени от. След като ги инсталирате на телефона, остава само да включите машината и да се свържете към нея и изберете секцията Добавяне на събития-> Акселерометър.
Видео с инсталирането на Amarino и неговите плъгини:
Скоростта на машината е равна на наклона на телефона. Ако машината се движи в грешна посока, трябва да смените проводниците от двигателите.