
Материали и инструменти:
- микроконтролер Arduino (в това домашно приготвени продукти прилага Arduino Uno Rev 3);
- Два серва от Parallax;
- джойстик (също от Parallax);
- платка) малка);
- конектори за свързване;
- Устройство за проследяване на движението на сервомотори (използва се счупена уеб камера и лего кубчета).
Процес на домашно сглобяване:
Първа стъпка. Свързваме серводвигатели
Процесът на домашно сглобяване започва с свързване на серводвигателите. За да се сглоби предварително оформление, се използва платка. Тогава ще бъде възможно да се направи отделен щит. На фигурата можете да видите как точно е свързано всичко.
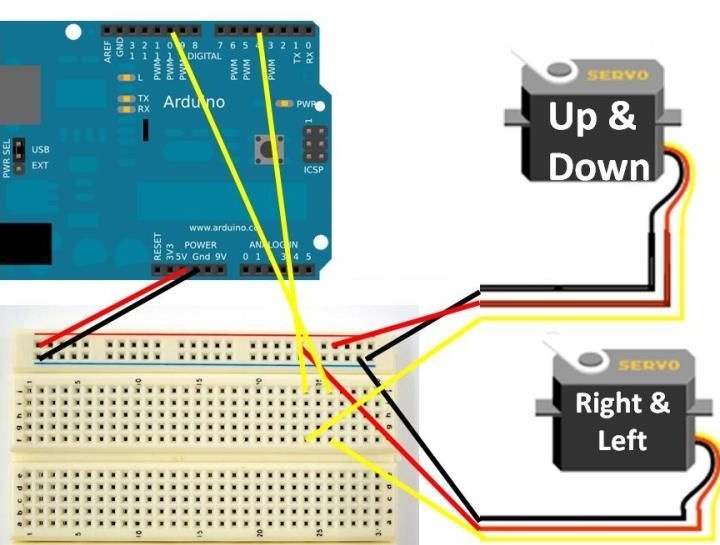
Червеният кабел е захранването, той се свързва към 5V пина на контролера Arduino.
Черният проводник е минус (земя), той се свързва към изхода на Arduino, наречен GND.
Жълтият кабел от сервомотора отдясно и наляво трябва да бъде свързан към щифт 11. При някои модели той може да бъде бял.
Подобен жълт нагоре и надолу кабел трябва да бъде свързан към щифт 4. Той може да бъде и бял при някои модели двигатели.
Важно е да запомните, че сигналните конектори, използвани за управление на двигателя, идват от PWM изходите.
Стъпка втора Свържете джойстика
Как е свързан джойстикът може да се види на снимката. В началото схемата може да изглежда доста сложна, но всъщност тук няма нищо сложно. Както при моторите, и тук се използва табела за окабеляване.
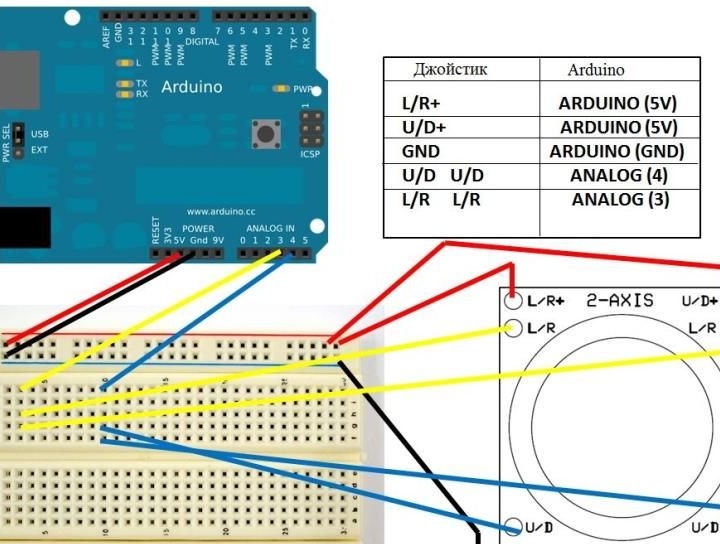
1. На модула на джойстика можете да намерите изходи U / R + и L / R +. Чрез тези изходи се свързва захранването. Съответно трябва да приложите + 5V напрежение от съответния щифт към Arduino.
2. Има също два конектора под джойстика, наречени L / R и два U / D конектора. Те трябва да бъдат свързани към аналоговите изходи A3 и A4.
3. Е, в заключение, земята на джойстика трябва да бъде свързана със земята на Arduino.
След монтажа връзката трябва да бъде проверена двойно. Именно поради грешки във връзката в повечето случаи възникват проблеми. Това е особено вярно, когато се използва платка и на нея има много връзки.
Стъпка третаСкица за Ардуино
Кодът е много прост и съдържа подробни коментари. Горният код просто трябва да бъде копиран в ID на Arduino. След като кодът се зареди, двигателите не трябва да се движат. Те трябва да започнат да се движат само при натискане на бутона на джойстика.
Проблеми, които могат да възникнат и как да ги решим
1. Ако двигателите не се включат, проверете двукратно връзката. PWM изходите се използват за свързване на двигатели, а аналогови изходи се използват за свързване на джойстици.
2. Случва се веднага след зареждането на кода двигателите да започнат да вибрират. Това се случва, ако неправилно свържете щифтовете U / D + L / R +. Връзката трябва да се провери внимателно. За да не изгорите платката по време на теста, тя трябва да бъде изключена от компютъра.
3. Ако всичко е проверено отново, но двигателите все още не искат да работят, можете да опитате да свържете отново джойстика. Тя трябва да бъде извадена от платката и след това да се инсталира обратно с известно усилие. Съединителите за джойстик трябва да влязат добре в оформлението.
Ако всичко се оказа, сега можете да започнете да създавате всякакви домашни елементи с контрол чрез джойстика. Например, можете да направите робот, който може да се управлява с джойстик и много други.