

Да направите такъв робот със собствените си ръце изобщо няма да е трудно и дори интересно. Резултатът е много интересно устройство, което ще се държи като живо същество. Всичко това благодарение на два малки мотора, те са тези, които задвижват робота. Променяйки ъгъла на атака на валовете на двигателя, можете да направите робота по-бърз или по-бавен. Можете също да експериментирате с различни съвети, които могат да се носят на вала на двигателя.
Материали и инструменти:
- два малки мотора (3 волта, могат да се намерят в детските играчки);
- държач за батерии (можете да го направите сами или да го извадите от старото дистанционно управление, фенерче и т.н.);
- два превключвателя от тип SPDT (могат да бъдат получени от стара компютърна мишка);
- две малки и една голяма хартиена щипка;
- малко колело от играчката;
- тънко окабеляване

Производствен процес:
Първа стъпка. Окабеляване за запояване
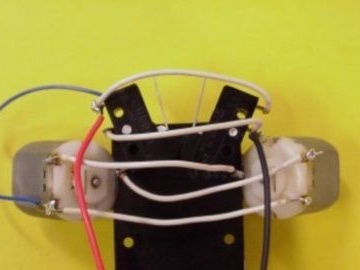
На първо място, трябва да подготвите проводниците и да ги спойкате към всички електронни компоненти, така че по-късно да е удобно да свържете възлите. Проводниците трябва да бъдат нарязани на дължина 6 см и отстранени от техните краища с около 1 см. Сега трябва да спойкате два проводника към моторите и превключвателите. Също така, не забравяйте да споявате двата проводника към контактите на държача на батерията. Другите краища на проводниците са за предпочитане калайдисани.

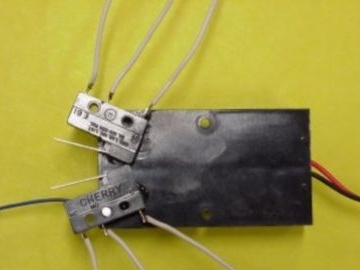
Стъпка втора Настройка на превключватели
За да настроите превключвателите, държачът на батерията трябва да бъде обърнат с главата надолу. Сега трябва да залепите превключвателите с лепило към държача на батерията. В резултат на това трябва да се образува буквата V.
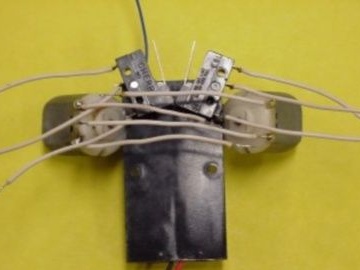
Стъпка трета Монтаж на двигателя
Моторите трябва да бъдат прикрепени към държача на батерията под ъгъл, както е показано на снимката. Ъглите от двете страни трябва да са еднакви, в противен случай роботът няма да работи правилно. Валовете на двигателя трябва да се опират на пътя. Моторите могат да бъдат монтирани с лепило.

Стъпка четвърта Монтаж на стабилизаторното колело
Стабилизаторът е необходим, за да домашно приготвени продукти стоеше равно на пътя. За да направите колело, можете да използвате валяк от магнетофон или колело от детска играчка. Що се отнася до „тапата“, тя е направена от дълга хартиена щипка или връв.В заключение, стабилизаторът се придържа равномерно към държача на батерията.

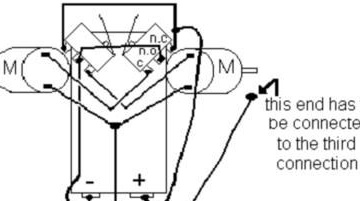
Стъпка пета Кабелна връзка
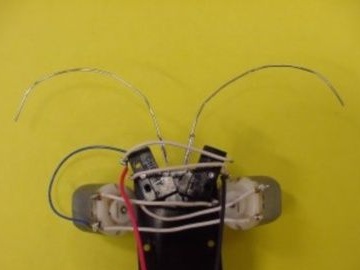
За да може роботът да работи правилно, всички проводници трябва да бъдат свързани ясно по схемата. Веригата може да се види на снимката.

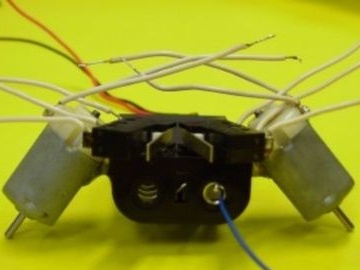
Стъпка шеста Направете мустаци за бъга
Мустаците ще служат като колело за бръмбара, веднага щом препятствие се срещне по пътя му, мустаците ще включат ключовете, а след това моторите ще завъртят робота в друга посока. Когато превключвателят се активира, един от двигателите се изключва и се задейства един вид диференциал. Ако и двата ключа са активирани, роботът спира напълно. Мустаците са направени от малки щипки за хартия, те трябва да бъдат внимателно залепени към бутоните на превключвателите.

Седма стъпка. Последна ревизия и тестване на робота
На последния етап трябва да се монтират гумени накрайници на валовете на двигателя, те са необходими за по-добро сцепление. Те могат да бъдат направени от камбрик.
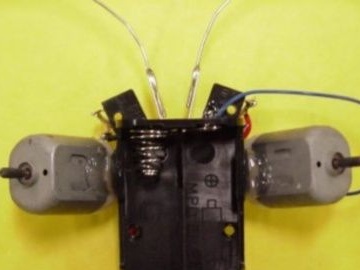
Това е всичко, роботът е готов. Трябва да го изпълните на гладка повърхност, например върху маса или линолеум. Тъй като лапите на бръмбара са твърде малки, той няма да пълзи по килима, за това ще е необходимо да увеличите връхчетата на моторните валове.
В бъдеще роботът може да бъде надстроен по свое усмотрение. Например, той може да направи LED очи, които ще светят, когато са в контакт с препятствие.