

Поздрави жителите на нашия сайт!
Този път AlexGyver, авторът на едноименния канал в YouTube, за празника, който, между другото, не ни харесва много, реши да повтори Проект на Adafruit - бионично око, което се вкарва в чашите на газов заварчик.

От гледна точка на кода този завършен проект абсолютно не е интересен, авторът се интересуваше от механизма, а именно от неговата координатна система.
Ще се върнем към това, но малко по-късно, но първо, нека съберем цялата механика и да свържем всичко електронен компоненти.
За да повторите този проект, ще трябва:
1) Очила за газов заварчик. Можете да използвате както метал, така и пластмаса.

Пластмасата със сигурност приляга по-добре, но разбира се не може да се похвали с качество. Конкретно в този случай, направен от пластмаса, страните буквално отпаднаха веднага и авторът трябваше да ги залепи.

Такива очила могат да бъдат закупени в магазина, продаващ инструменти или строителни материали. Авторът ги купи в магазина All Instruments.
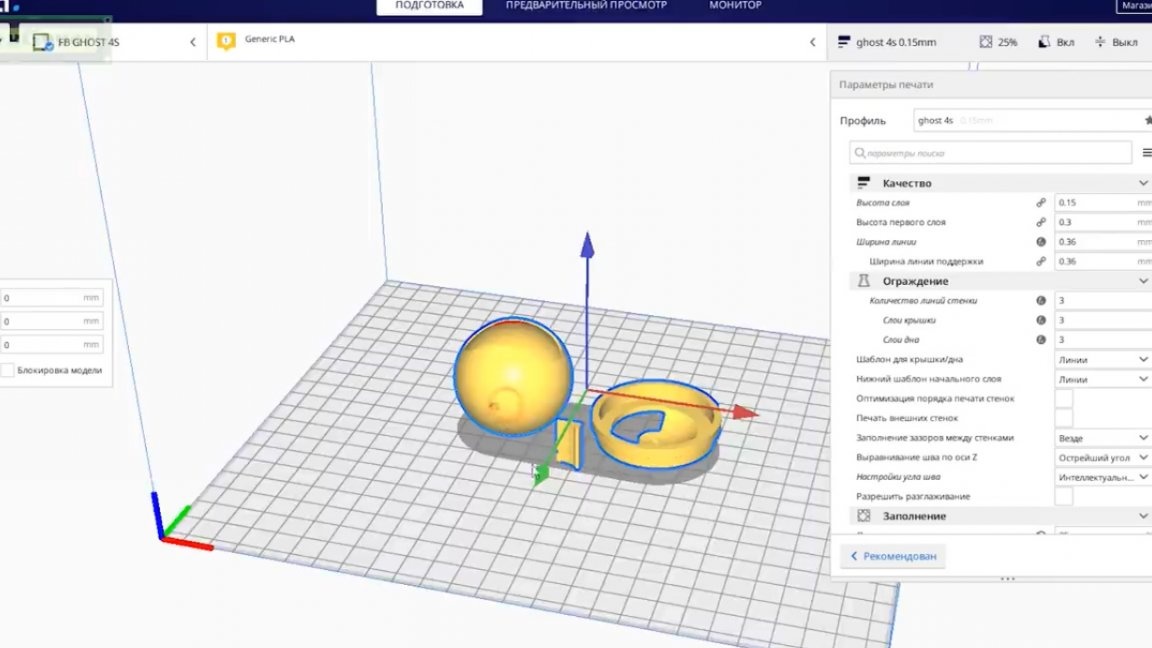
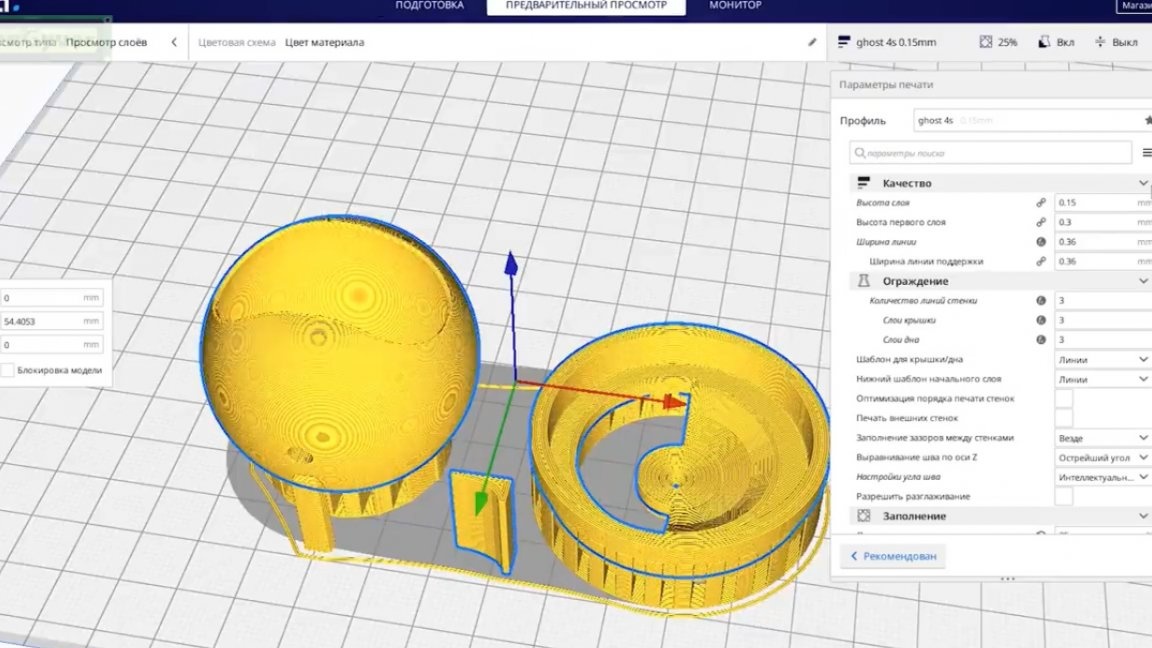
2) След това трябва да ги отпечатаме 3D принтер резервни части.
Авторът отпечата елементите с бяла PLA пластмаса на новия 32-битов летящ призрак 4s 3D принтер. досие съдържа всички 3 модела наведнъж. Печатът е необходим с опори.

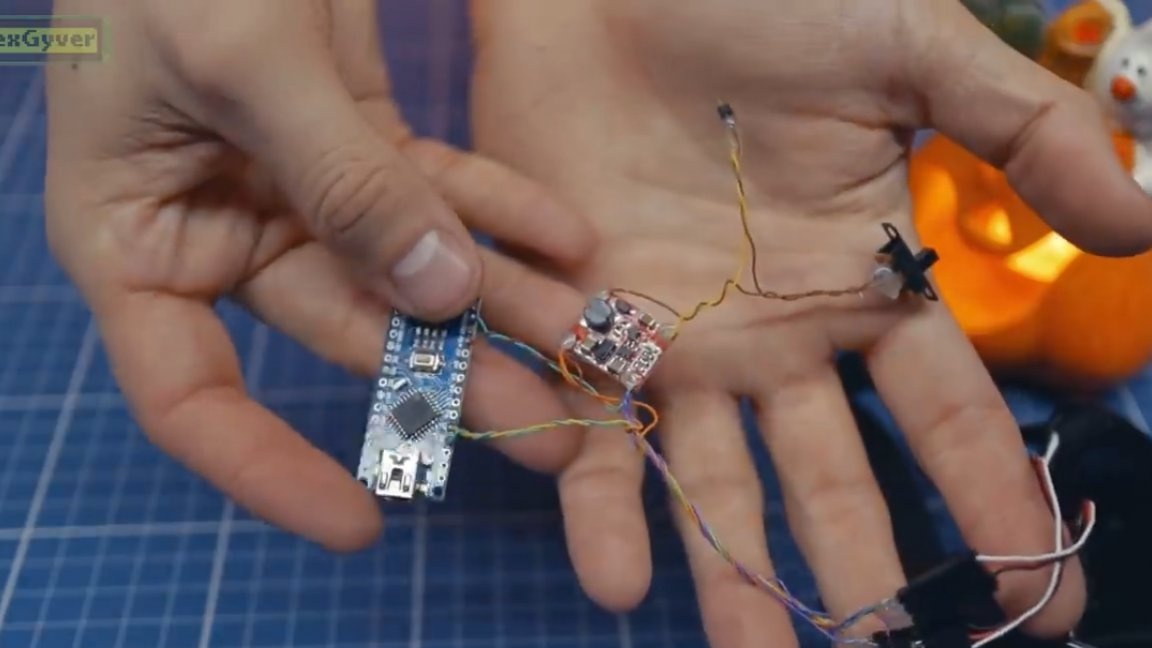
3) Следващият компонент, необходим за нашия специален проект за Хелоуин, е платформата Arduino Nano модели.

4) Също така се изисква литиево-йонна батерия:
5) Boost DC-DC (до 5V) преобразувател;
6) превключване:

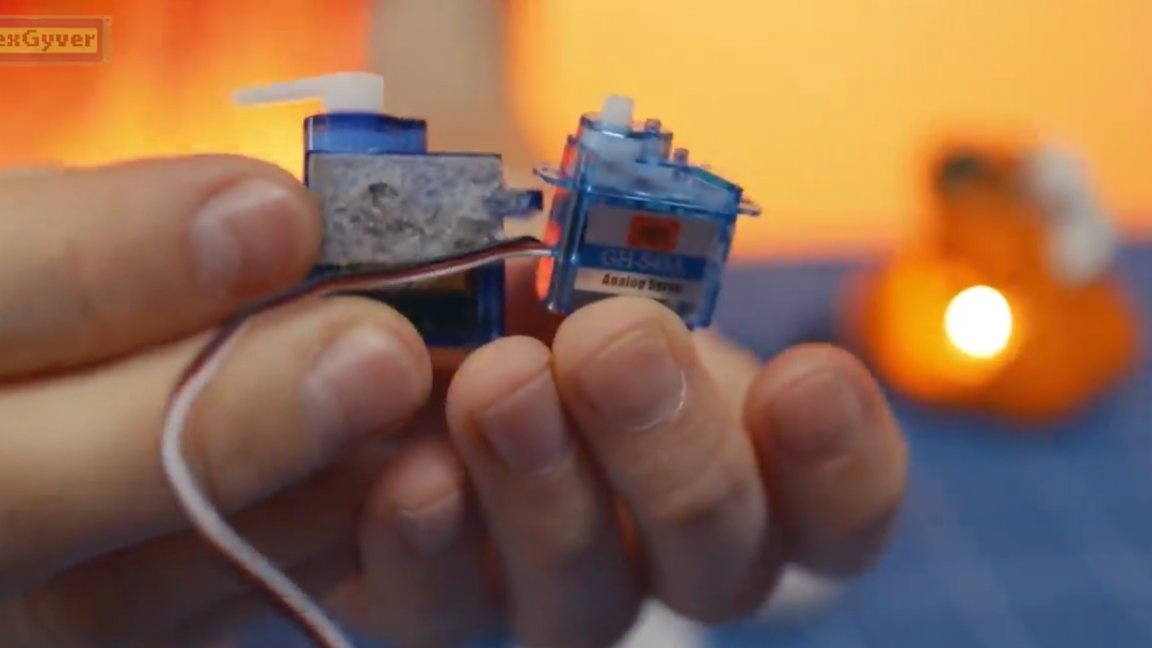
7) Микро серво, но не стандартните 9 грама, но още по-малко:
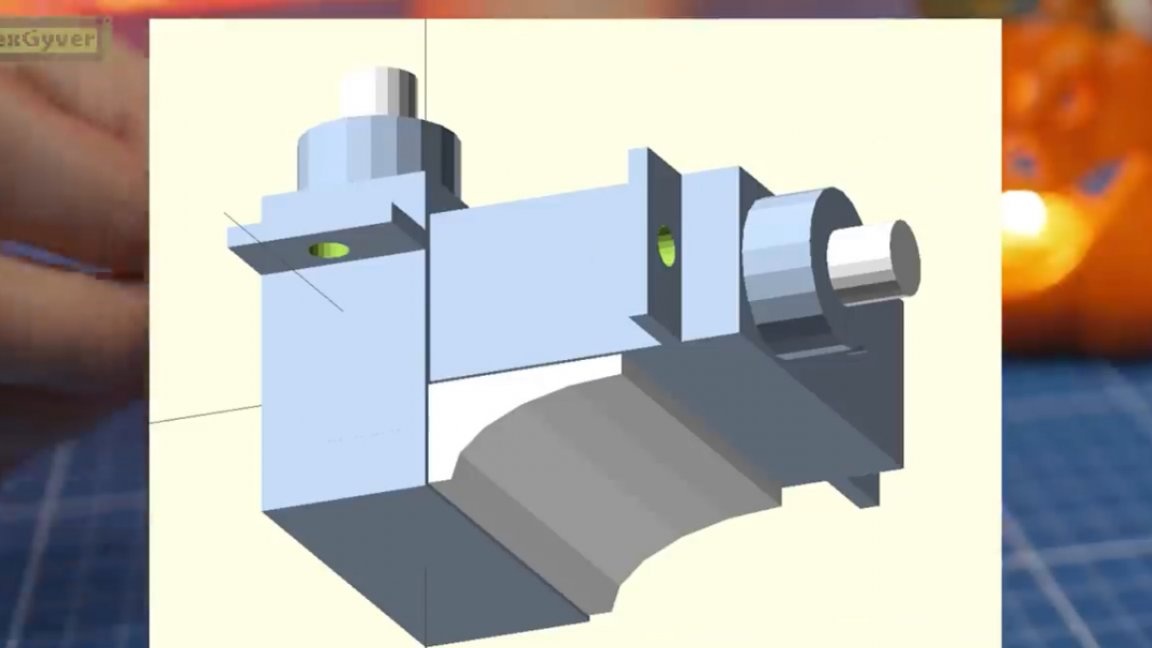
Така че, с необходимите компоненти, някак си измислени, нека се пристъпим към сглобяването на устройството. Първо трябва да монтираме устройствата, както следва:
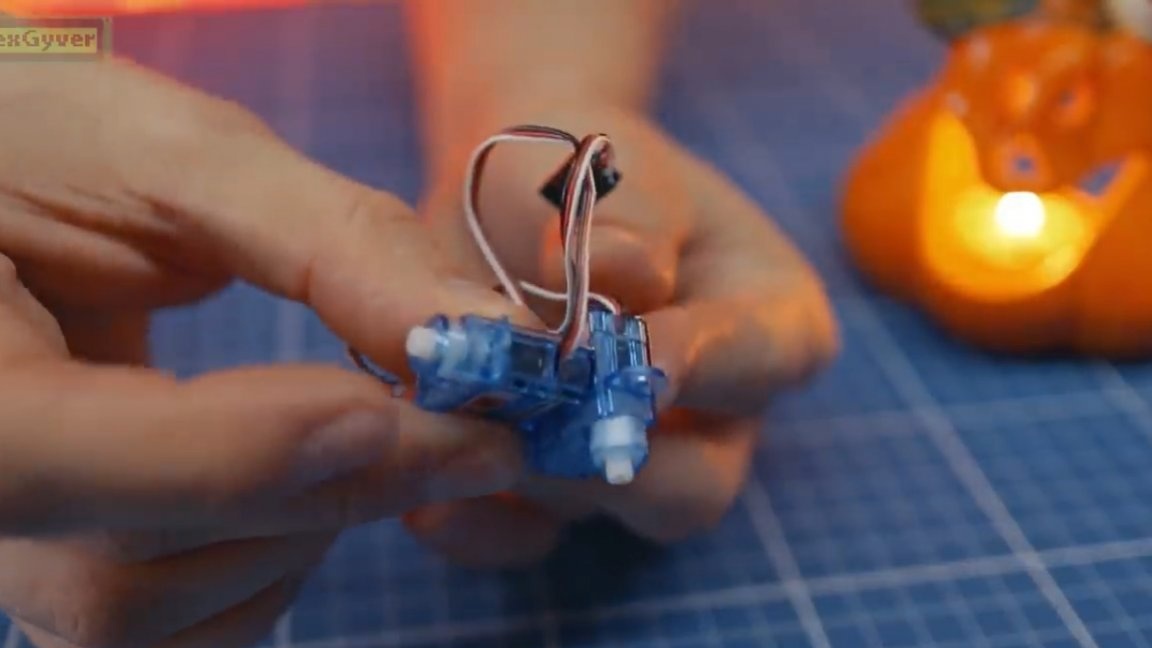
Ето една по-разбираема картина:
Изваждаме стикера и с помощта на суперклея свързваме цялото това нещо.


Между другото, китайските сервоприемници изглежда са малко по-различни от тези на Adafruth и трябва да ги залепите така, с малко компенсиране:
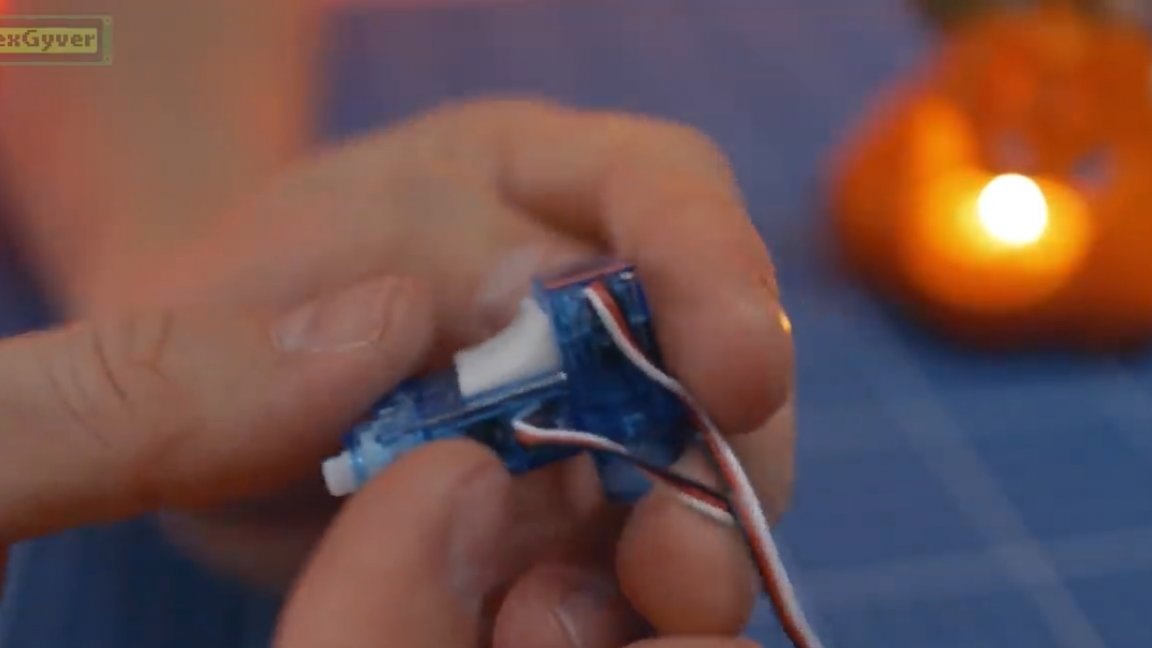
Ушите трябва да бъдат премахнати, те ще се намесят.
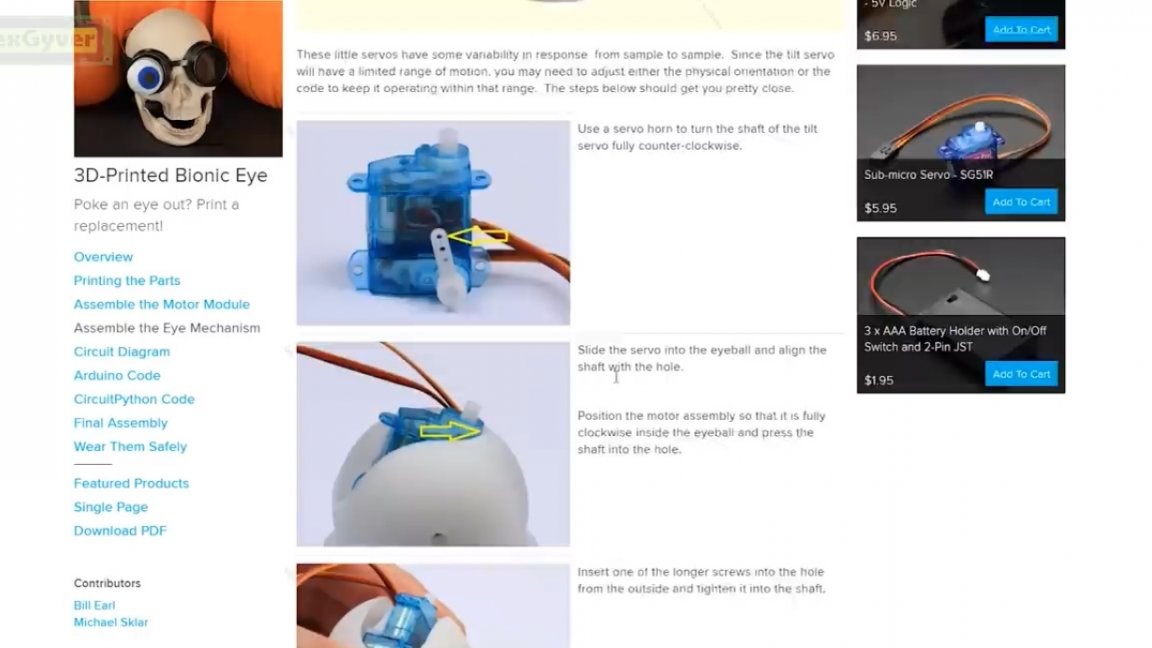
След това към долното задвижване закачаме кочанчето и завъртаме вала обратно на часовниковата стрелка.

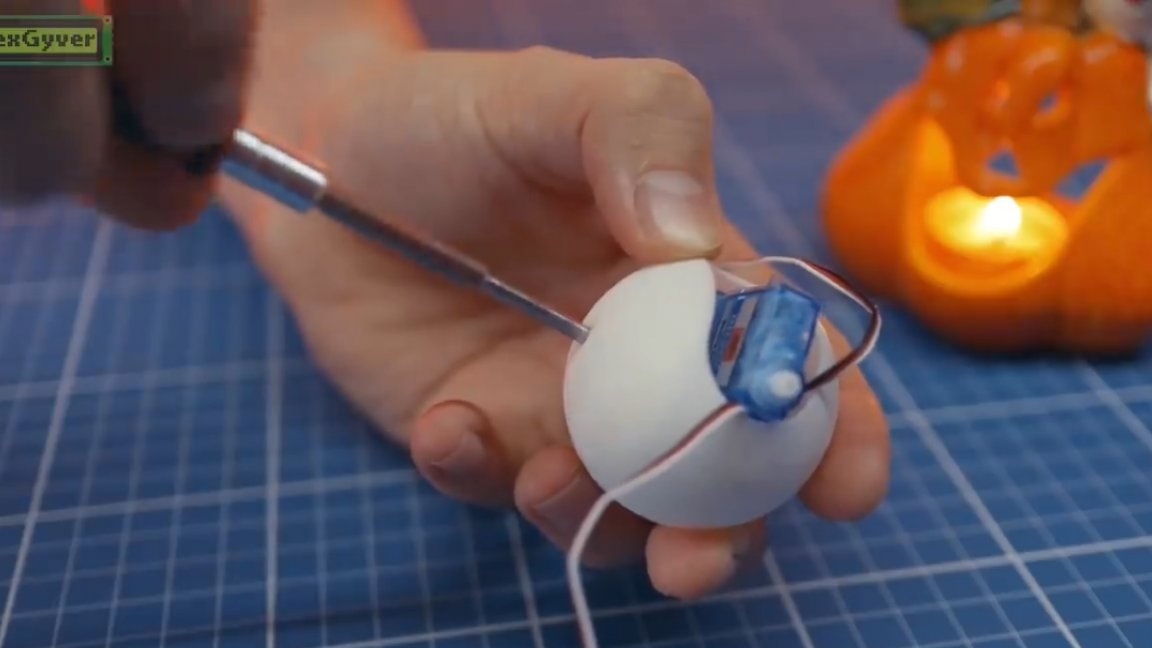
Поставете сервовете в предварително отпечатаното 3D принтер празен (око).
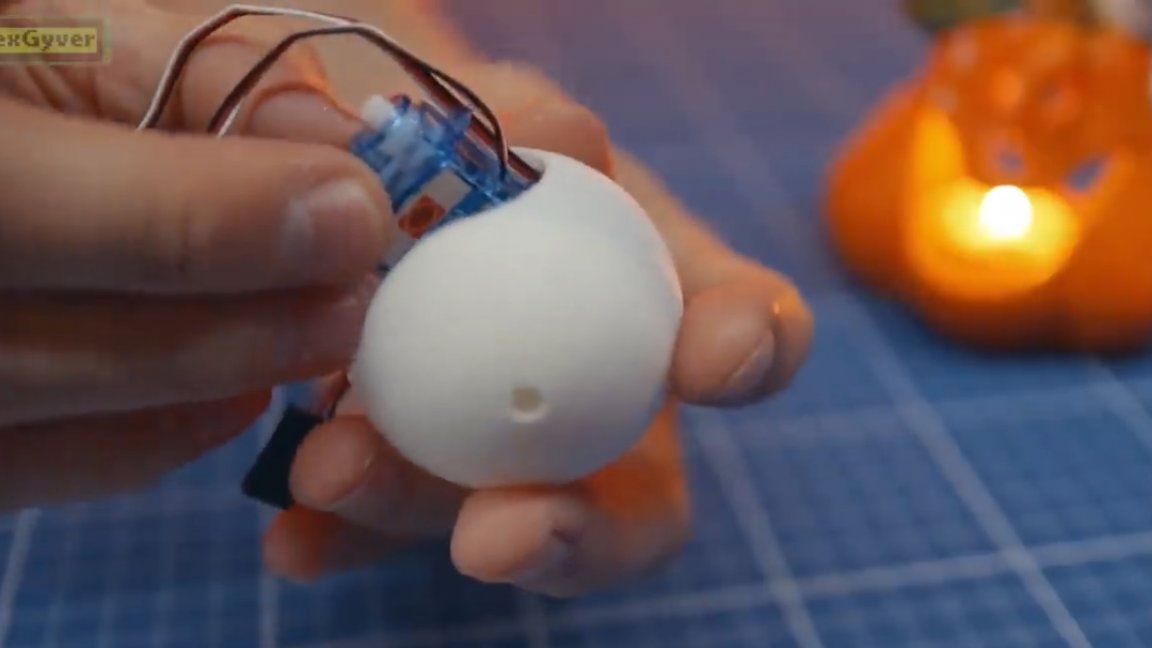
Спряме изпъкналото задвижване до самия ръб и вмъкваме изходния вал в отвора вътре в окото.

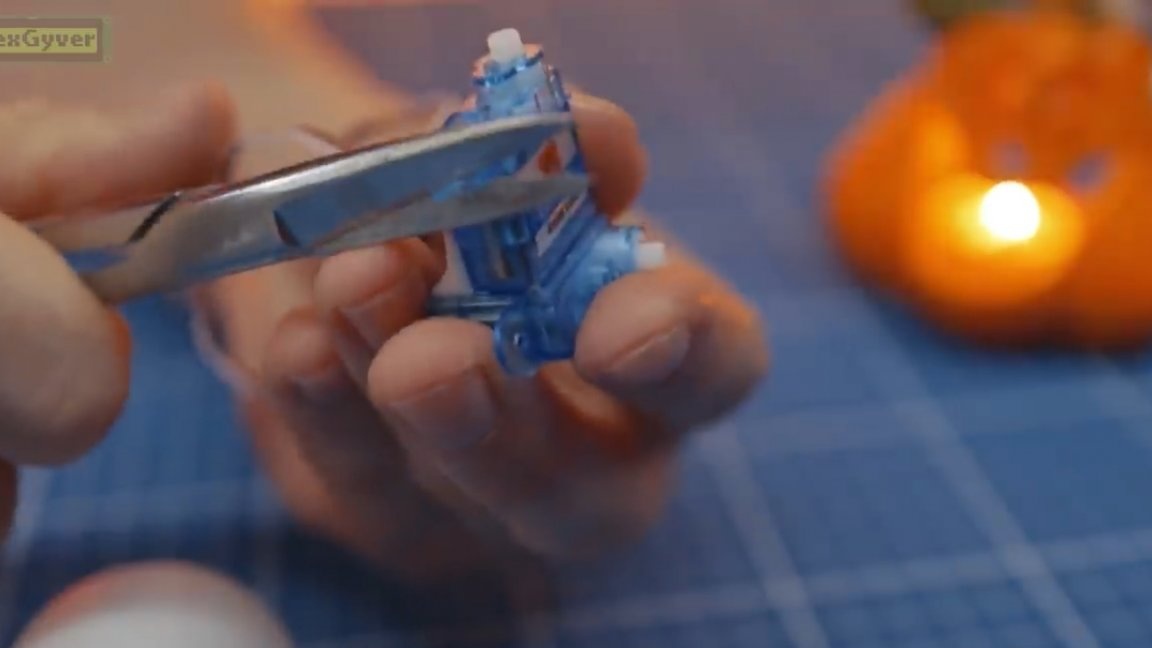
Дългият пълен винт трябва да се съкрати малко. Това може да стане с помощта на щипки.

След това с помощта на съкратен винт фиксираме вътрешното устройство.
Ако имате серво тестер, можете да проверите работоспособността на получения механизъм.
След това прикрепяме втората част на окото към вала на второто задвижване и също го закрепваме.

Убедени сме в цялостното представяне (трябва да работим заедно).


Специално за този проект авторът написа прост код, който плавно върти дисковете под произволен ъгъл. Но центърът на окото беше леко пристрастен, така че намираме действителния център и изчертаваме зеницата.

Е, тъй като това е празничен проект, а празникът е доста специфичен, тогава нека го направим малко по-страшен.

След това поставете получената част в чашите.

Ако не е поставен, е необходимо да се скоси малко.

След това сглобихме всичко.


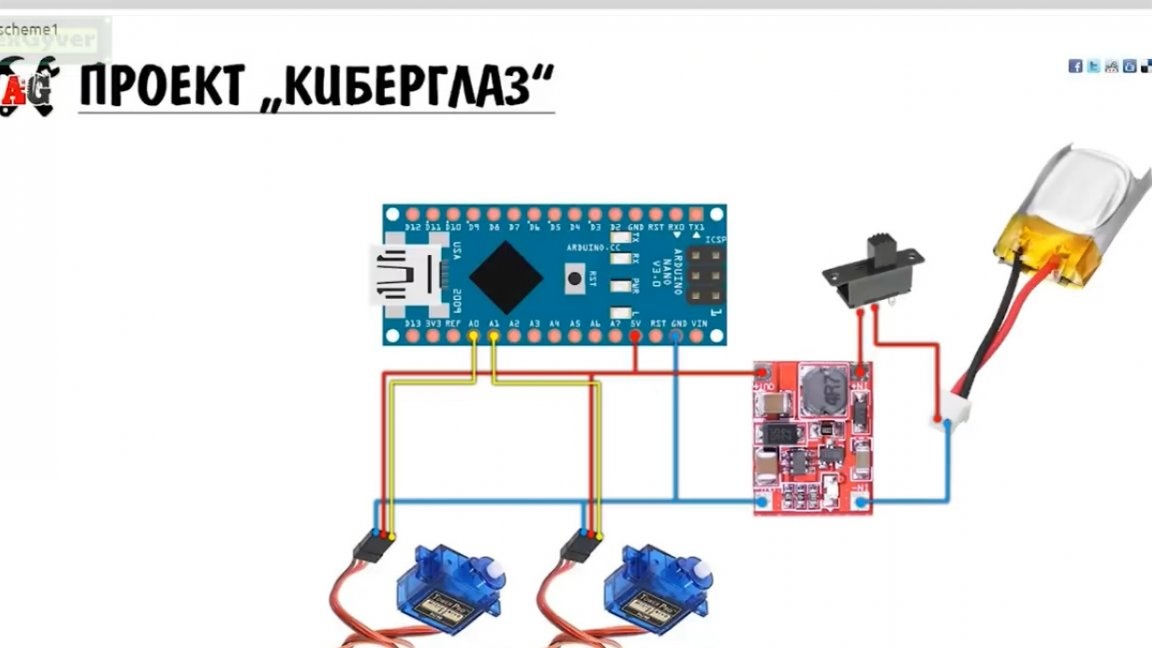
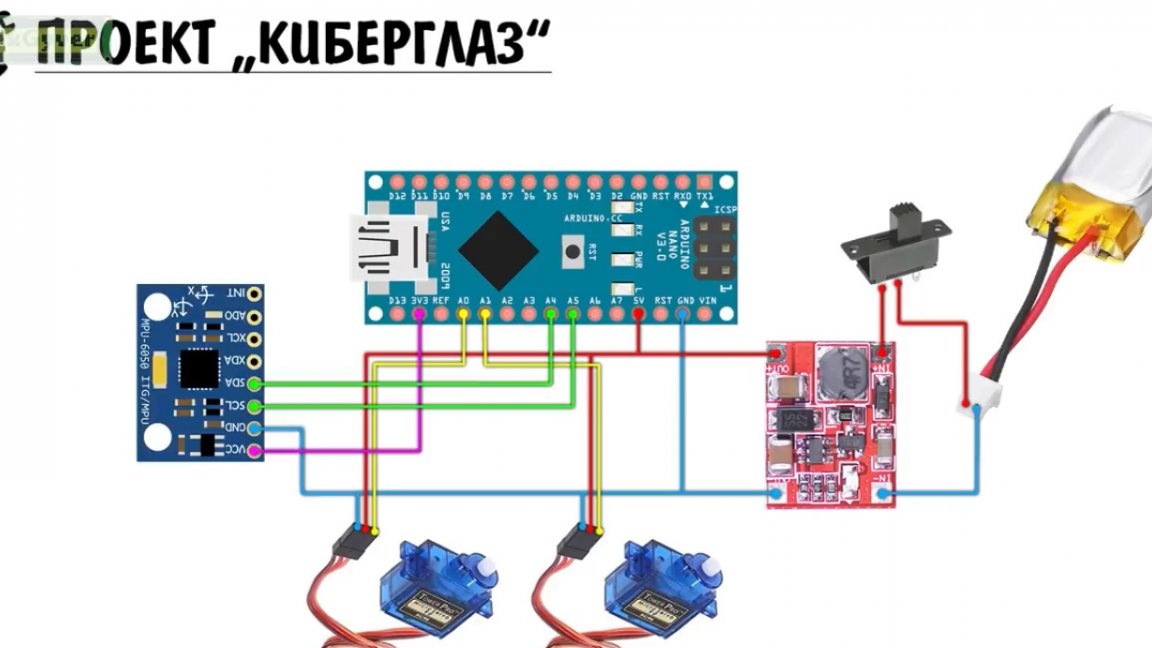
След това свързваме всички компоненти според следната схема:
Всичко е готово, но сега всеки задвижване просто се издига до произволен ъгъл и по принцип можете да го оставите така.

Но не забравяйте, че в началото на статията беше споменато за механизма и координатната система? И така, механизмът се върти по две оси, но не по протежение на тези, по които се върти човешкото око. Нашата цел е да накараме подобен механизъм да се държи точно като човешкото око. На пръв поглед това изглежда невъзможно, но можете да опитате да приведете неговата координатна нормална норма, така че да можете да поставите зеницата във всяко желано положение.
И така, имаме два ъгъла, обозначаваме ги с X и Y.

Y е малкият ъгъл на окото, а X е ъгълът на въртене на окото с 180 градуса.
За постигане на всички възможни позиции е необходимо да се контролират и двата ъгъла и има специфичност. Да започнем с най-простото - кръгово движение с максимален радиус.
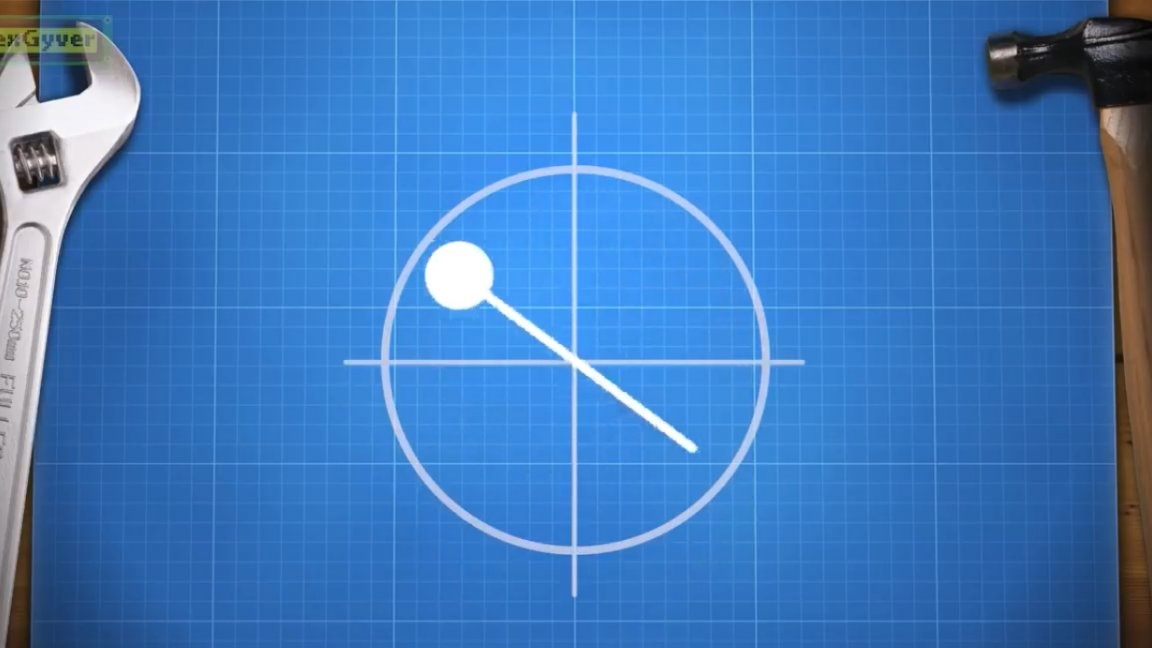
Но не е толкова просто, колкото изглеждаше. Следователно първото нещо, което авторът направи, беше полярна координатна система, в която можете да зададете ъгъла на въртене на окото и радиуса, тоест отстраняването на зеницата от централната точка 00.
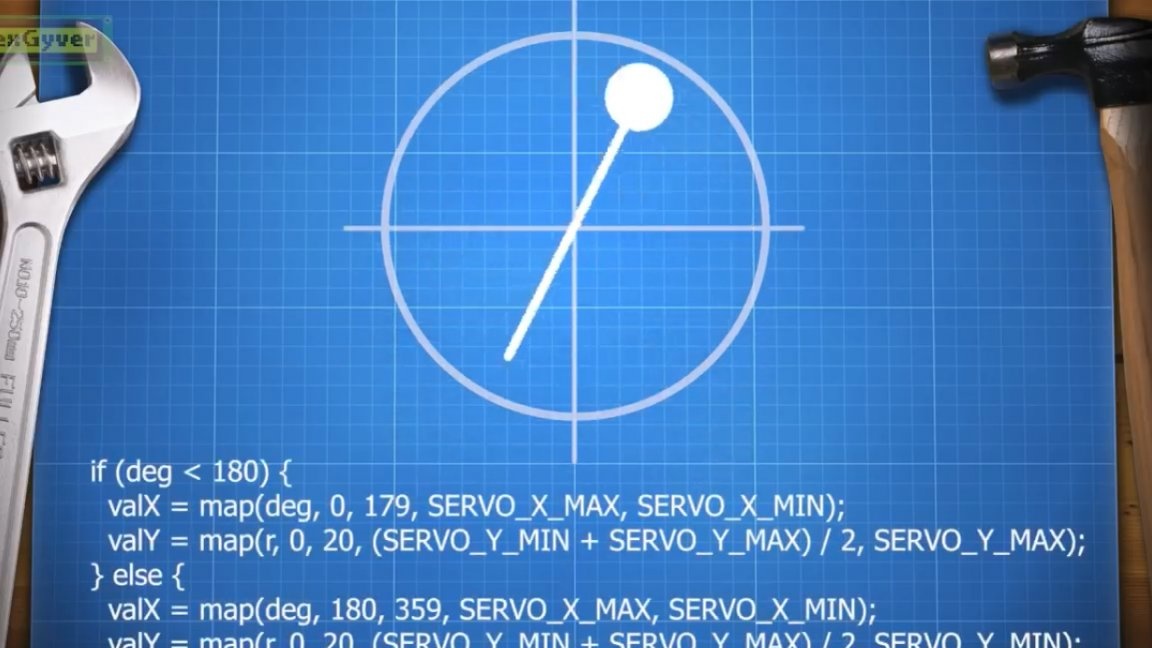

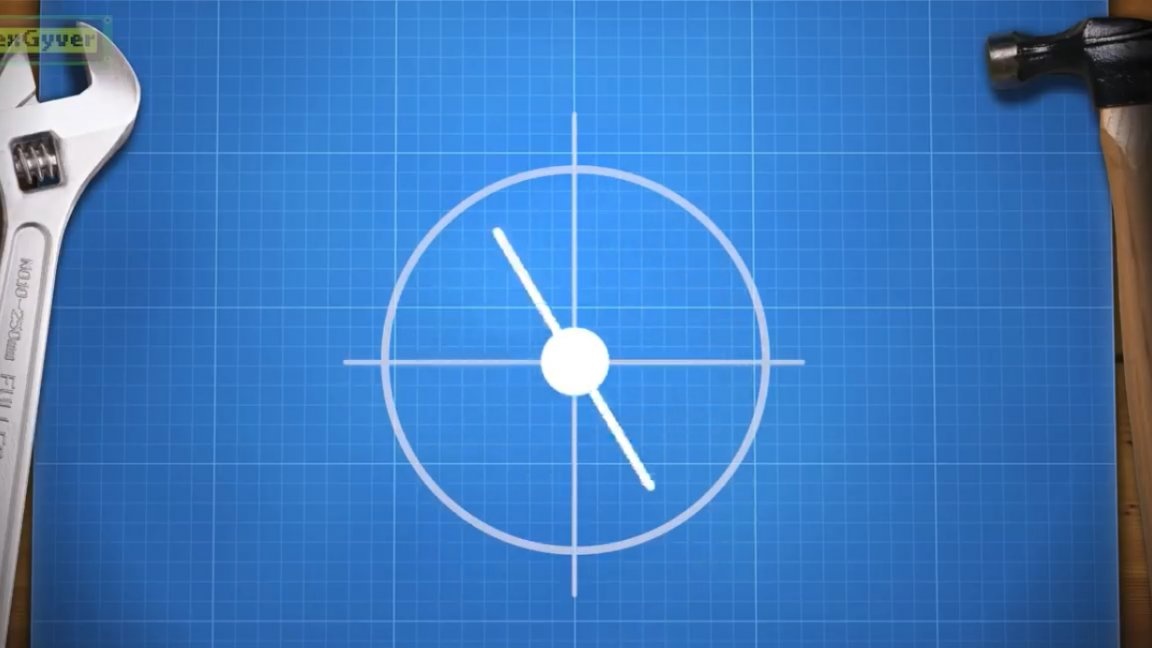
В горния полукръг работим от половината ъгъл Y до неговата максимална стойност, а в долния - от минимум до половината. Сега движението на очите може да се програмира по по-интересен начин. Самите движения са произволни, но вече по обиколката.


Сега нека спойка цялата електроника, всичко е както е на диаграмата:
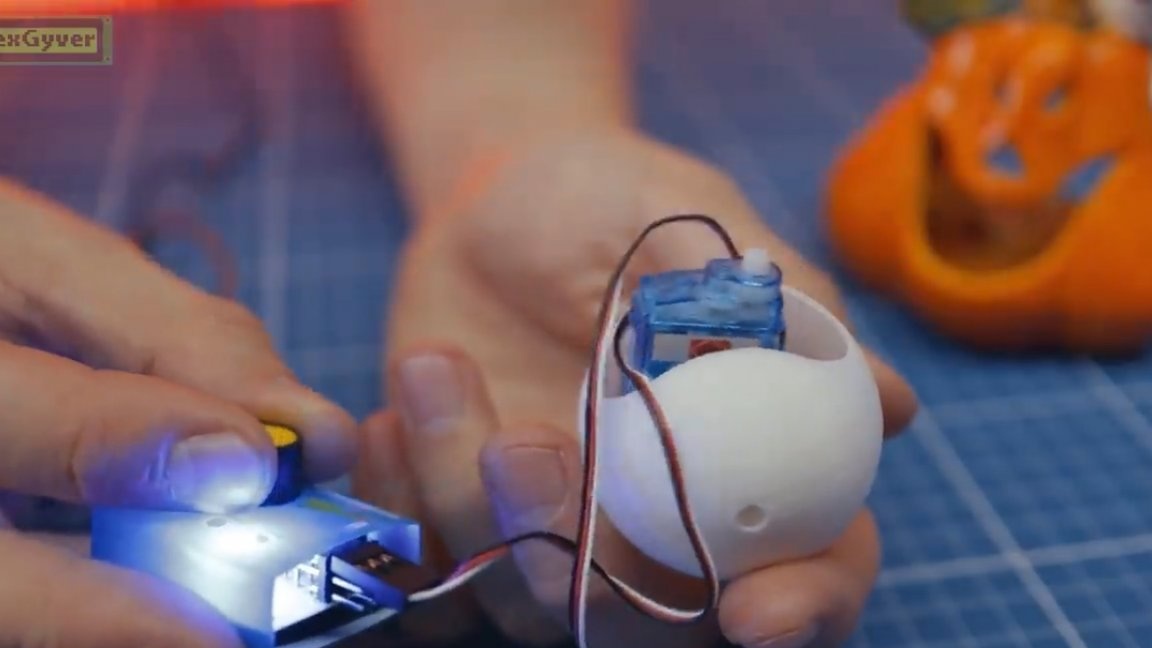
Опитвате се да го включите.
Индикацията е. Сега ние крием всичко това в някаква сграда (в случая авторът е използвал поле за отметка).

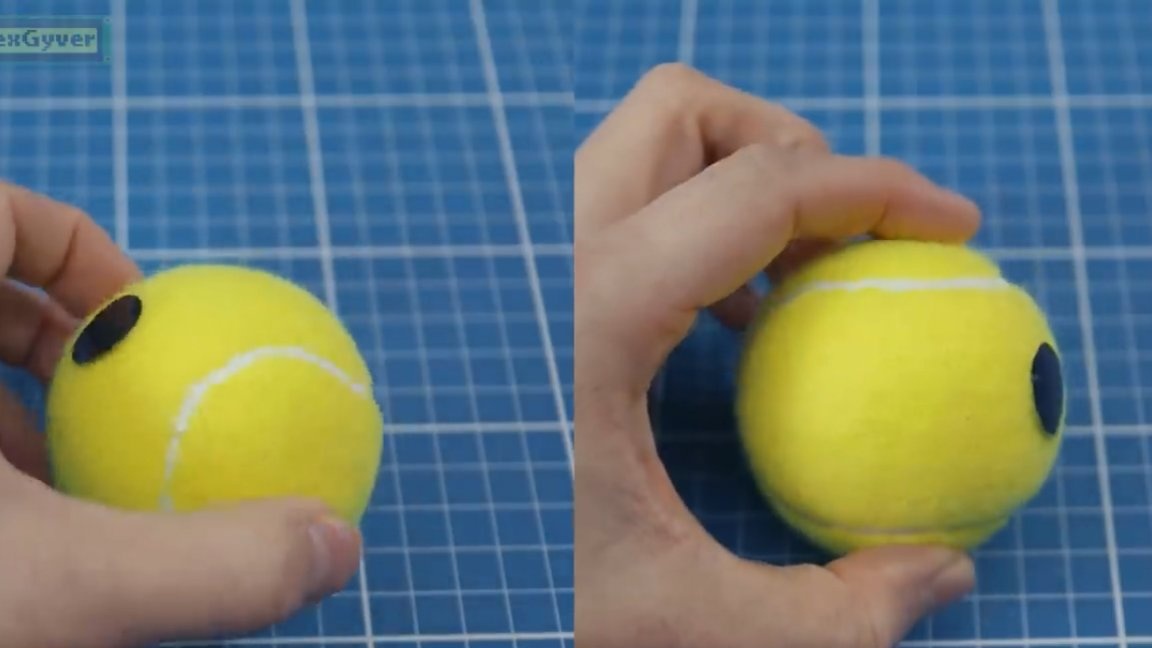
Всички наши кибер очи са готови. Ето такава шега.


Но нека все пак да продължим нашите теоретични изследвания и да преведем полярната координатна система в декартова, по-късно ще разбера защо.

Тук всичко е просто, функцията atan2 ще ни помогне, която връща ъгъла в радиани от –P до P, а функцията на хипота, която ще изчисли дължината на хипотенузата в същите две координати, а хипотенузата е радиусът на предишната ни функция.

И по толкова прост начин нашият експериментален субект вече може да насочи окото си точно там, където ни е необходимо (нагоре, надолу, надясно, наляво).

Така че защо е необходимо това? Това е необходимо, за да можете да добавяте жироскопс помощта на която окото ще се обърне в същата посока като главата, което вероятно ще изглежда доста смешно. Всъщност проектът беше добавен жироскоп mpu6050, така изглежда на диаграмата:
Променете кода, уверете се, че показанията от жироскопа отклоняват окото. Чрез филтъра естествено.

И така, какво ще получим в крайна сметка? Окото е малко късно зад завоя на главата, като по този начин създава ефекта, че завива надясно и те гледа. В резултат на това ето такъв малък математически проект.

вмъкване ТУК, Благодаря за вниманието. Ще се видим скоро!
Авторско видео: