

Ако правите първия си квадрокоптер и нямате 3D принтер, то тази инструкция е за вас. По пътя на изграждането на този квадрокоптер майсторът направи седем модела и всеки от тях имаше свои значими недостатъци. И накрая, той успя чрез опит и грешка да направи това работещо модела.
Инструменти и материали:
- Шперплат с дебелина 7 мм и размер приблизително 30 х 22 см;
- Алуминиева профилна тръба 25 * 25 мм - 1 метър;
-Izolenta;
-Krepezh;
-Заключване на конец;
-Паялни аксесоари;



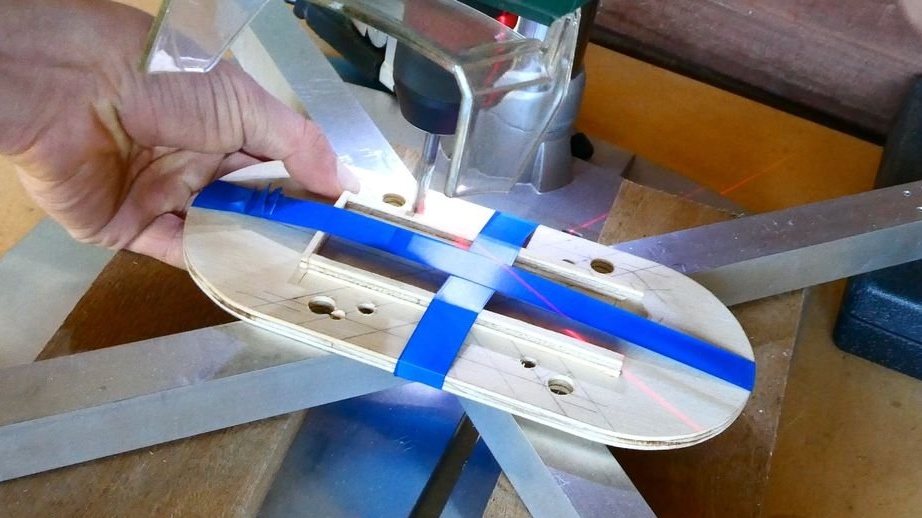
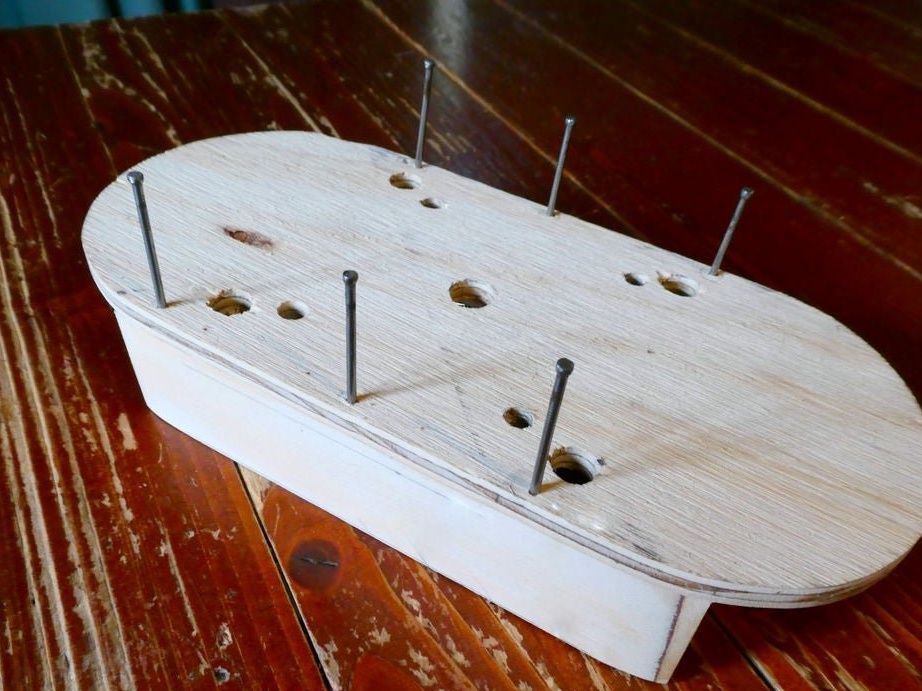
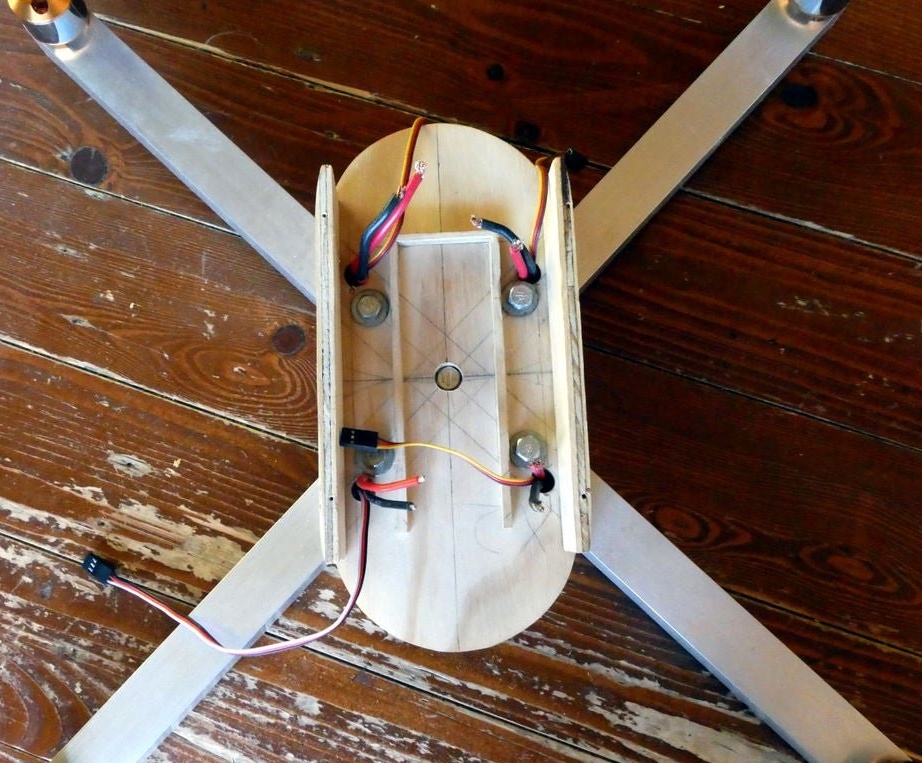
Първа стъпка: Случаят
тип шаблон и го залепете върху шперплат. Изрежете частите и пробийте всички дупки.
Поставете батерията върху основата и балансирайте основата. Очертайте батерията. Залепете лентите от трите страни на батерията.





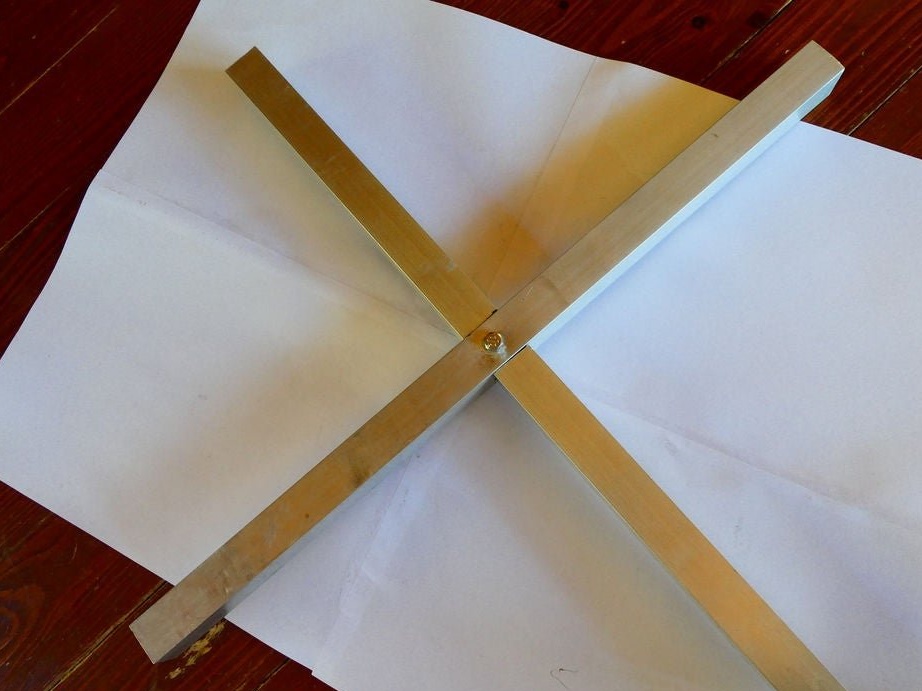
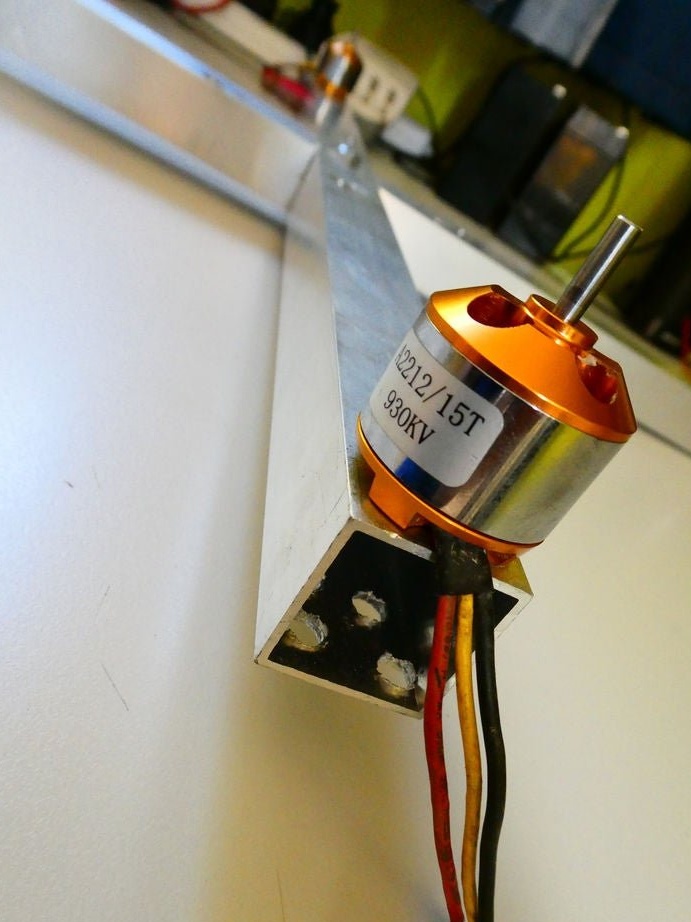
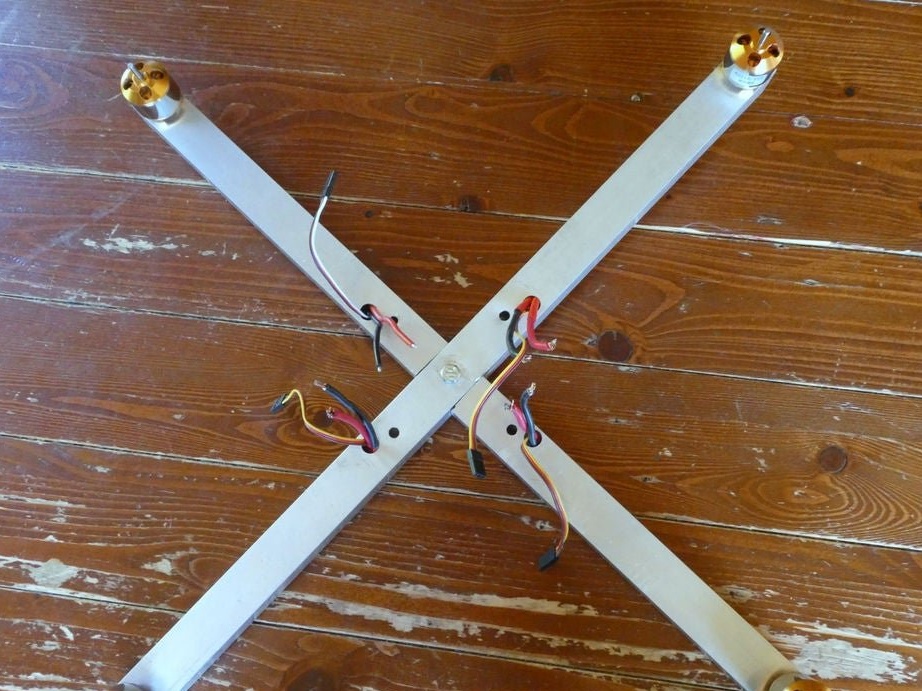
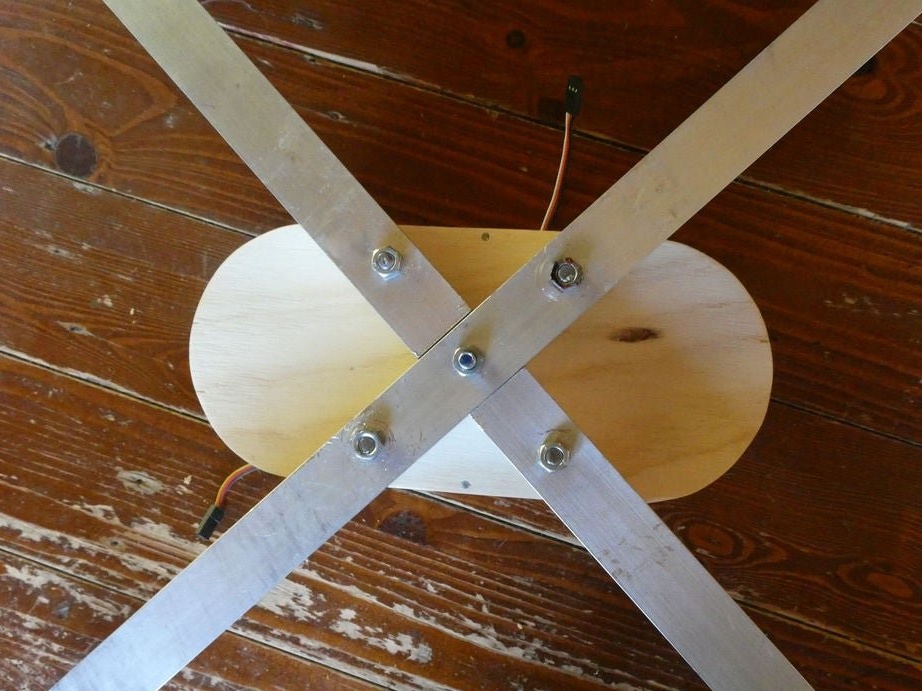
Втора стъпка: Frame
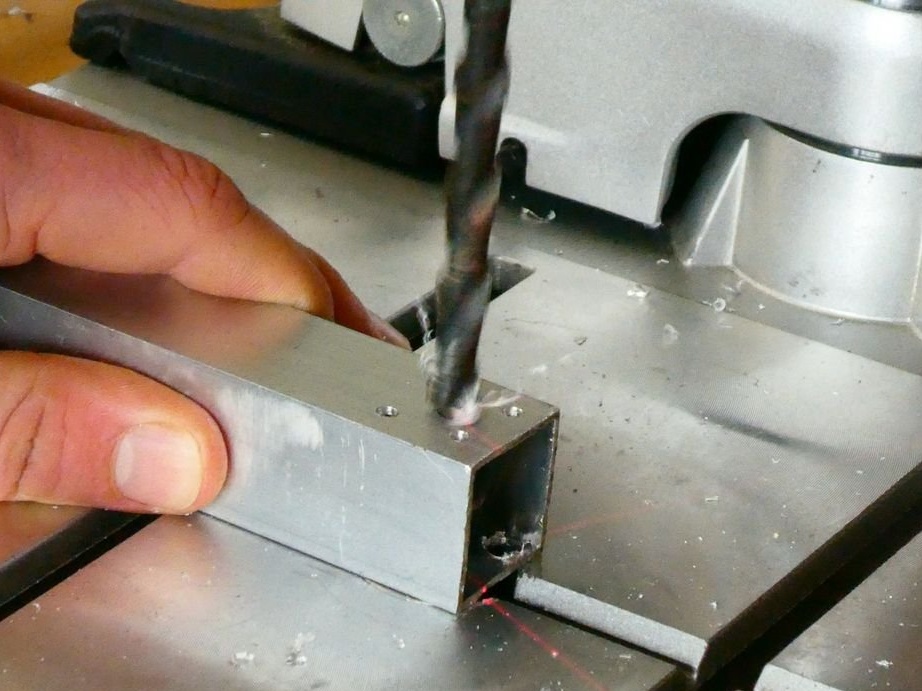
Разрежете алуминиевата профилна тръба на две равни части (50 см всяка). Нарежете два канала с размери 2,5 см в средата на тръбите. Пробийте в центъра на отвора. Сглобете кръста и закрепете с болт.

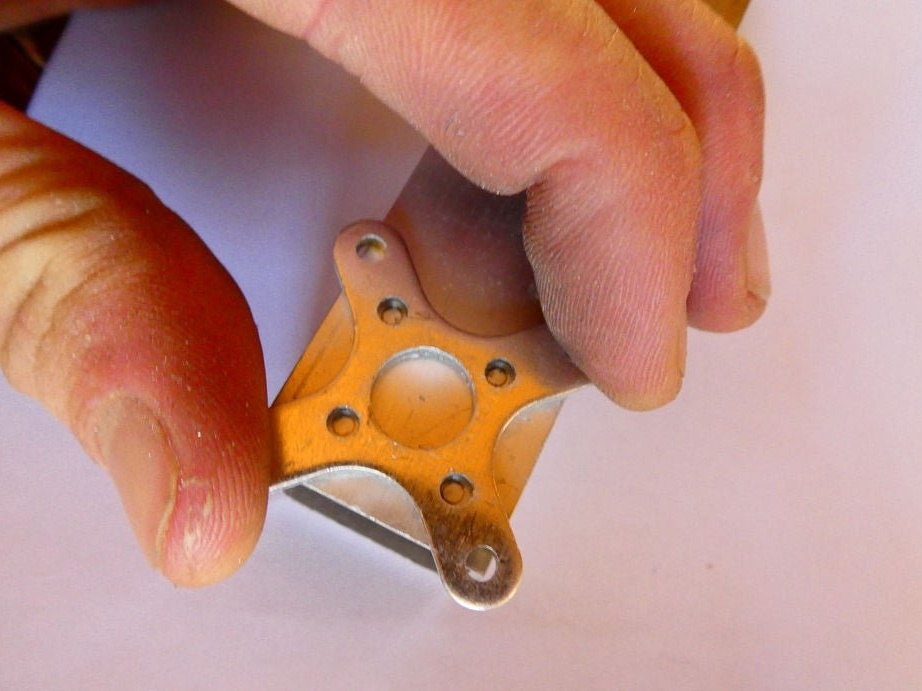
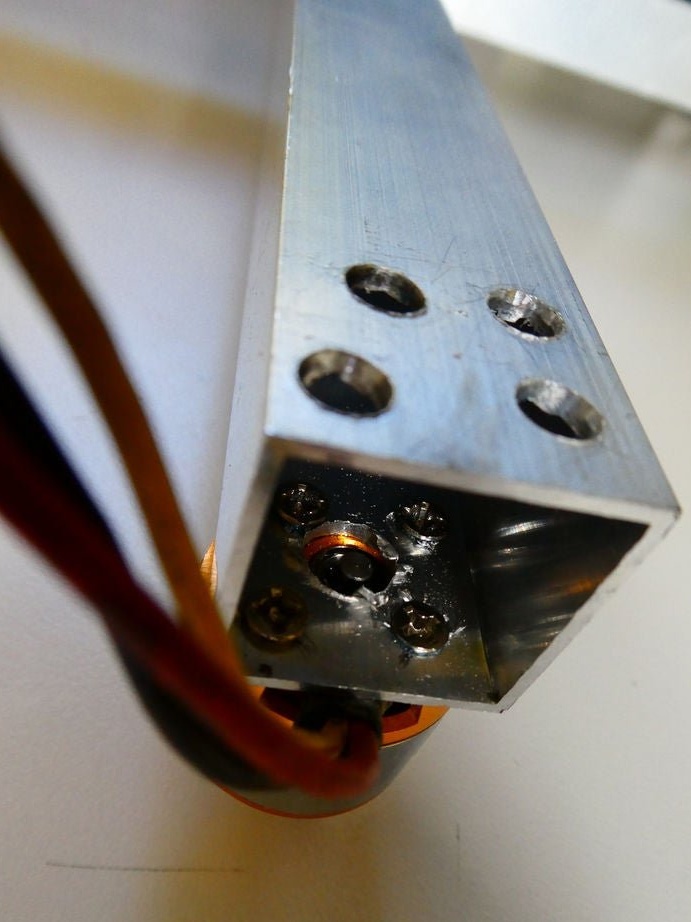
Сега използвайте стойката на двигателя, която се доставя с тях, за да маркирате монтажните отвори. Пробийте дупки. Бръчките трябва да бъдат шлифовани.

Маркирайте и пробийте монтажните отвори за закрепване на шасито към рамката.
Залепете страничните ленти към тялото.

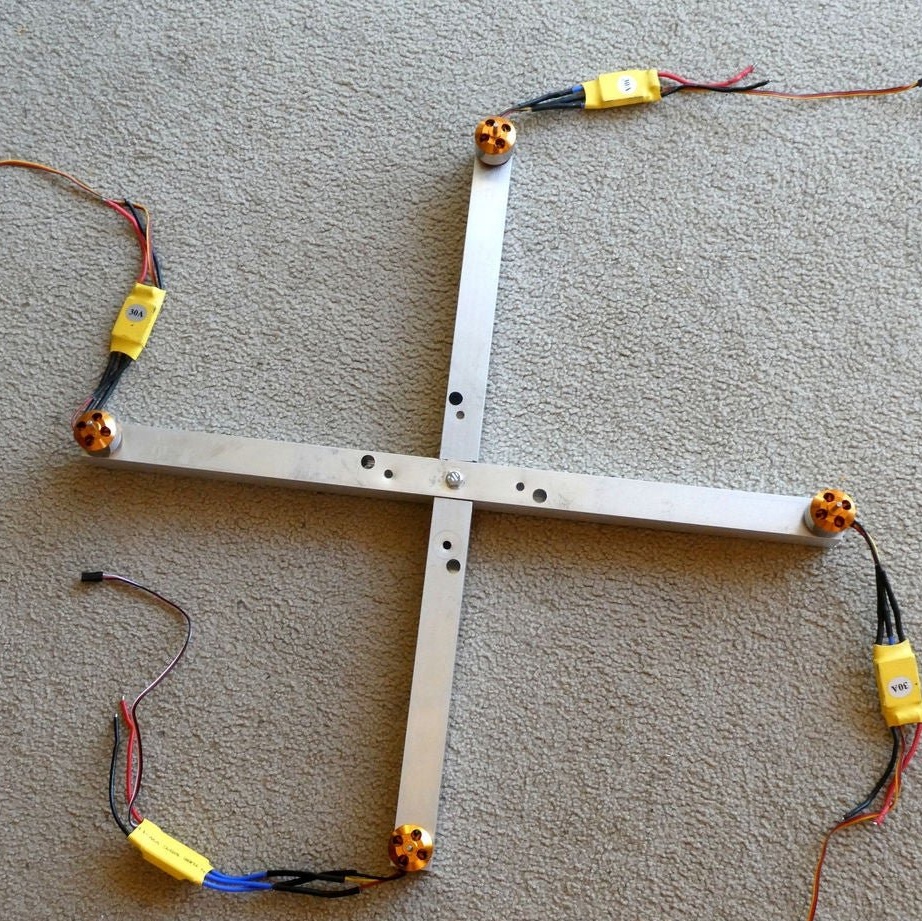
Стъпка трета: Инсталиране
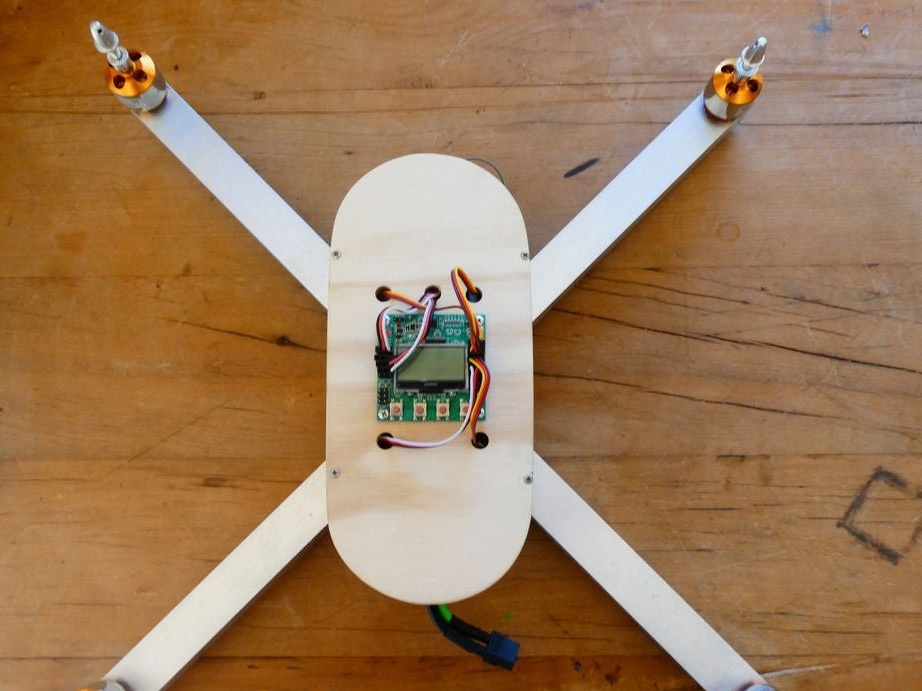
Сега трябва да фиксирате двигателите на рамката. Абсолютно е необходимо да приложите конец на резбата към фиксиращите винтове, в противен случай винтовете ще се развият и моторите ще отлетят.
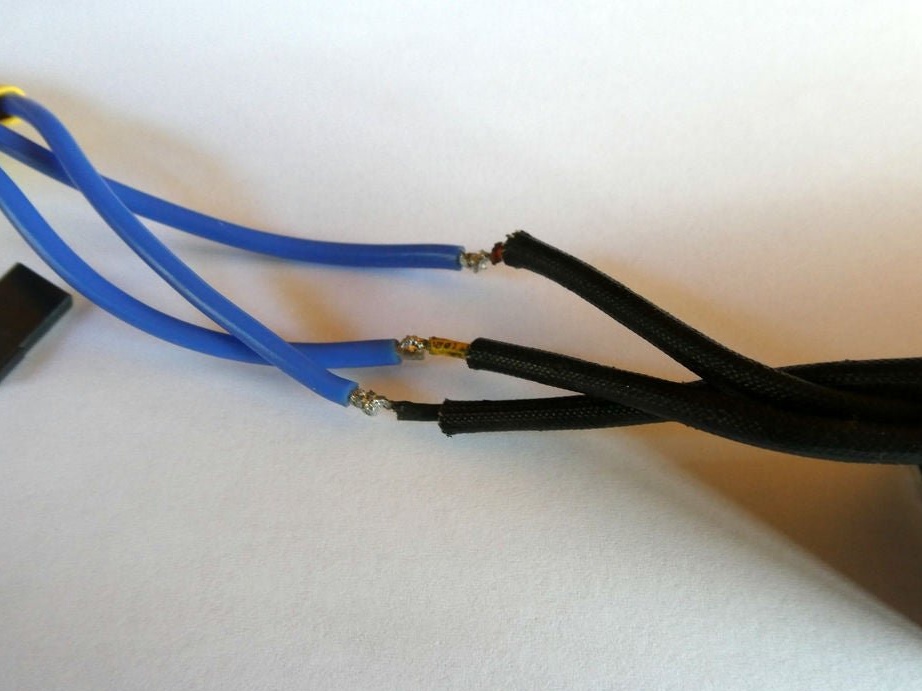
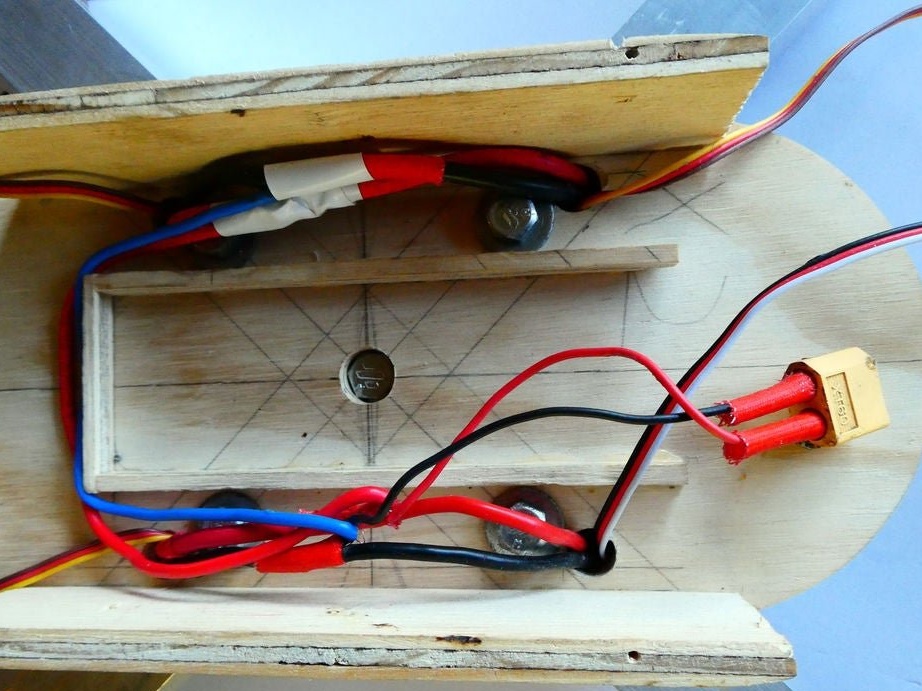
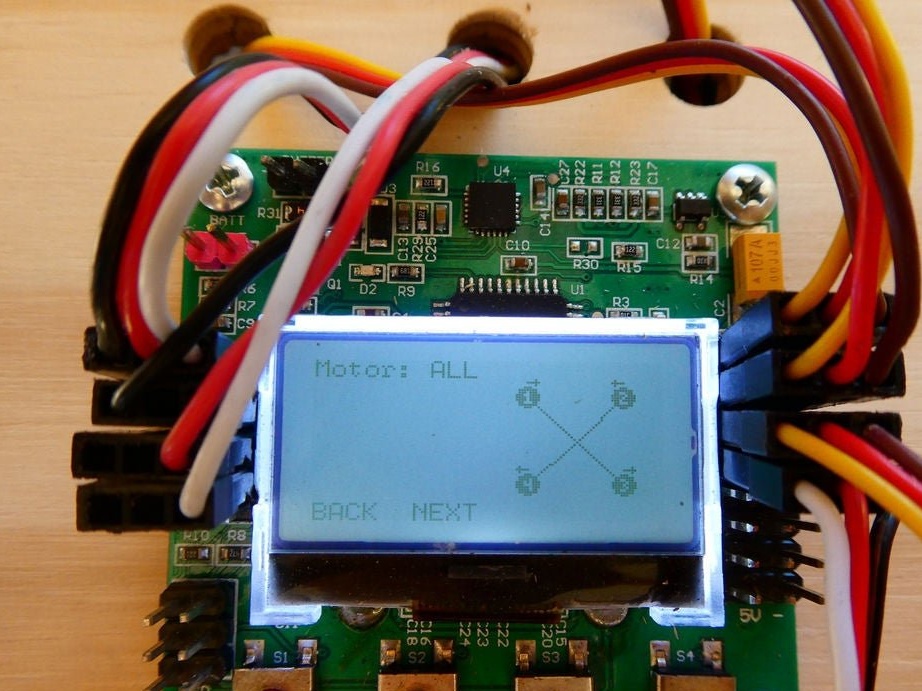
Свържете ESC към моторите така, че горният ляв мотор се върти по посока на часовниковата стрелка, горният десен мотор се върти обратно на часовниковата стрелка, долният десен мотор се върти по посока на часовниковата стрелка, а долният ляв мотор се върти обратно на часовниковата стрелка. За да промените посоката на въртене на двигателите, сменете два от трите проводника. Изолирайте връзките.
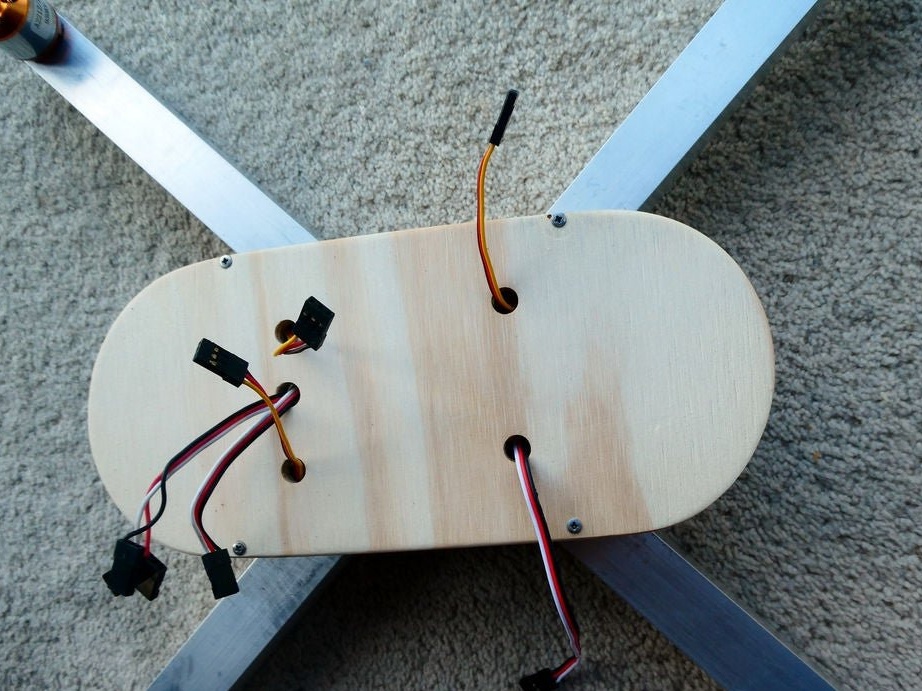
Издърпайте проводниците през рамката и издърпайте в отвора, ESC се фиксира вътре в тръбите на рамката.

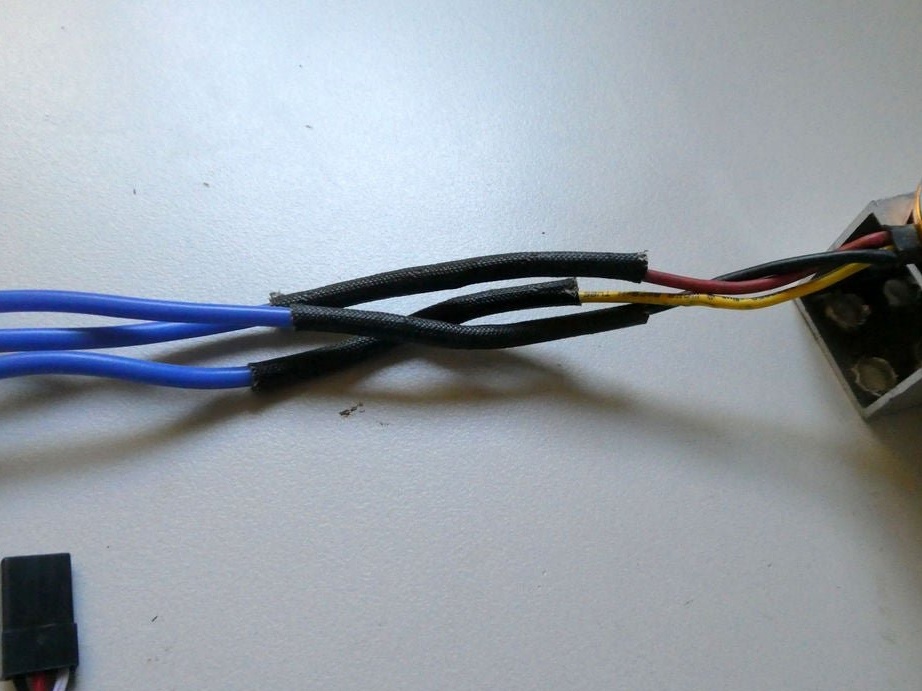
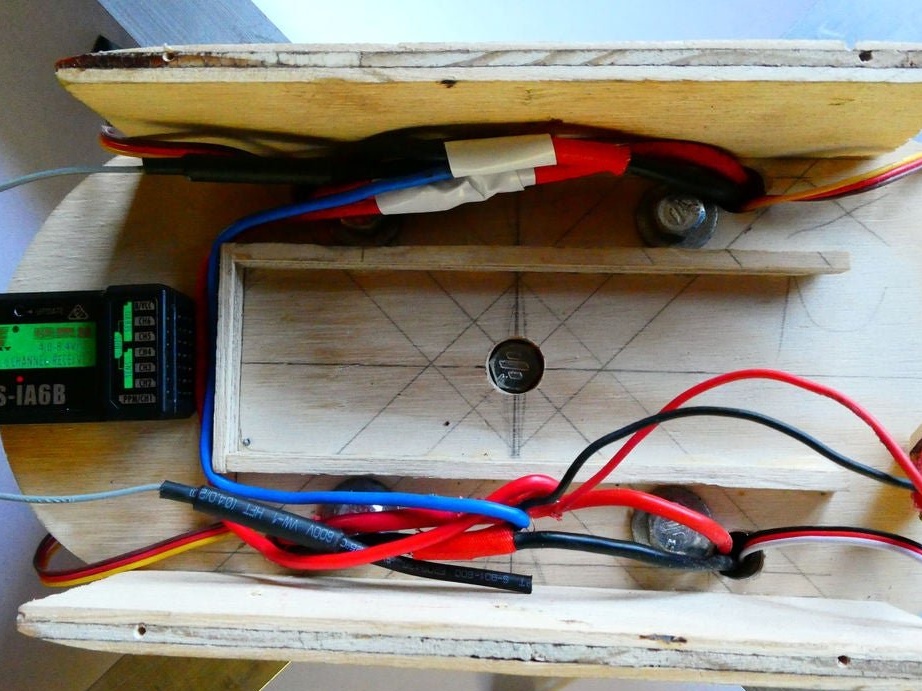
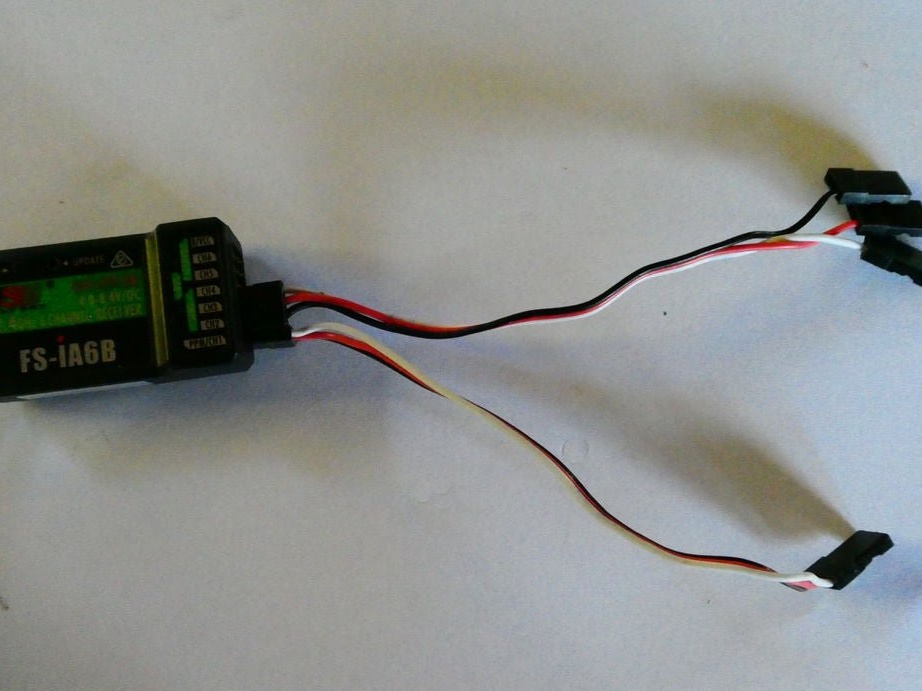
Свържете всички черни (минус) и всички червени (плюс) проводници заедно. Спойка двете проводници към конектора XT60 (червен и черен). Закрепете приемника към шасито с помощта на двустранна лента.
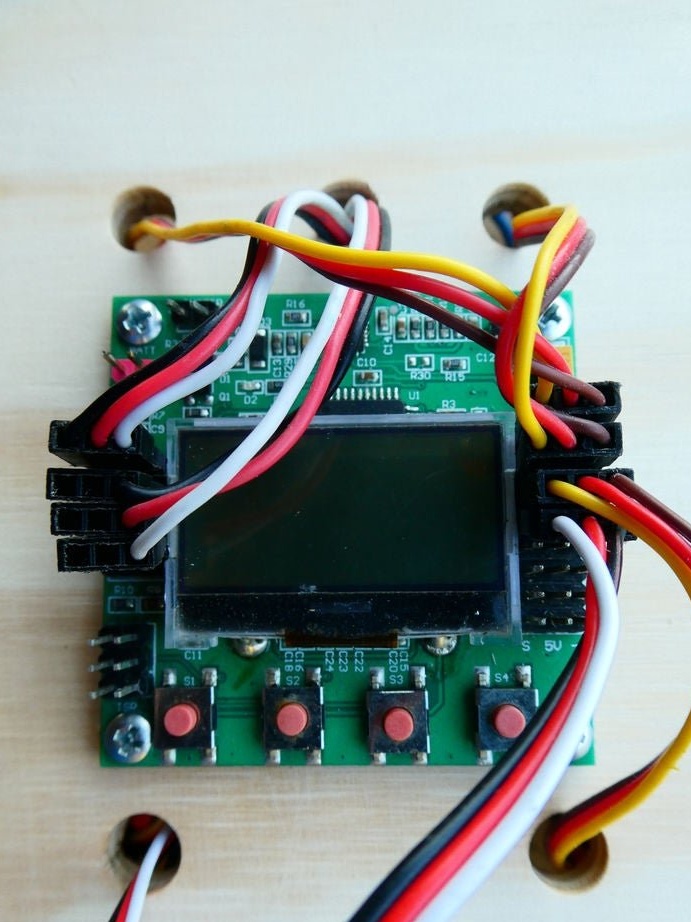
Издърпайте проводниците от контролера и приемника през отворите в капака на отделението, след което завийте капака. Завийте контролера към капака. Свържете проводниците към таблото за управление на полета.
Четвърта стъпка: Настройка
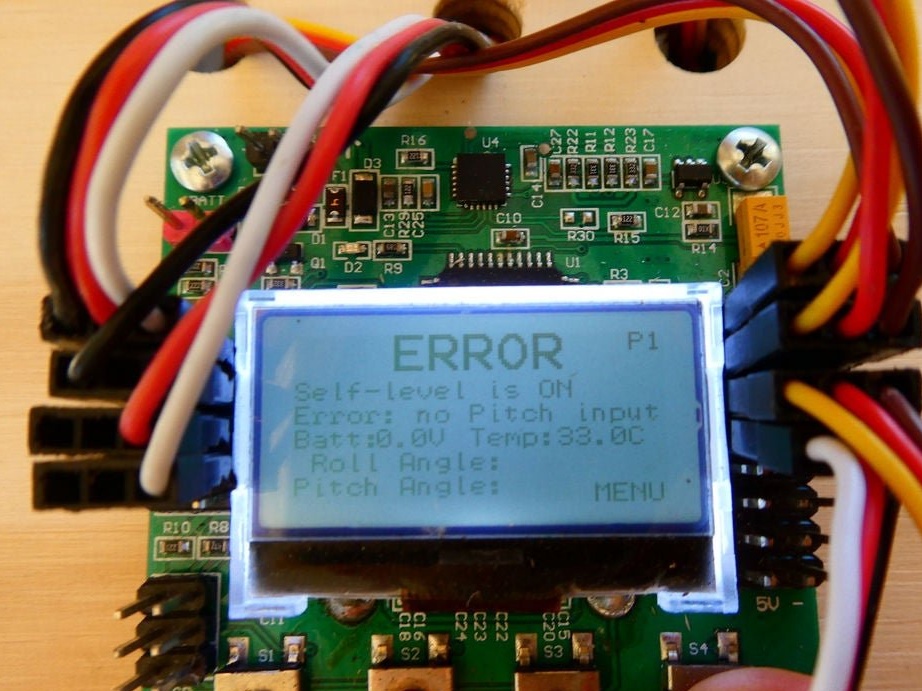
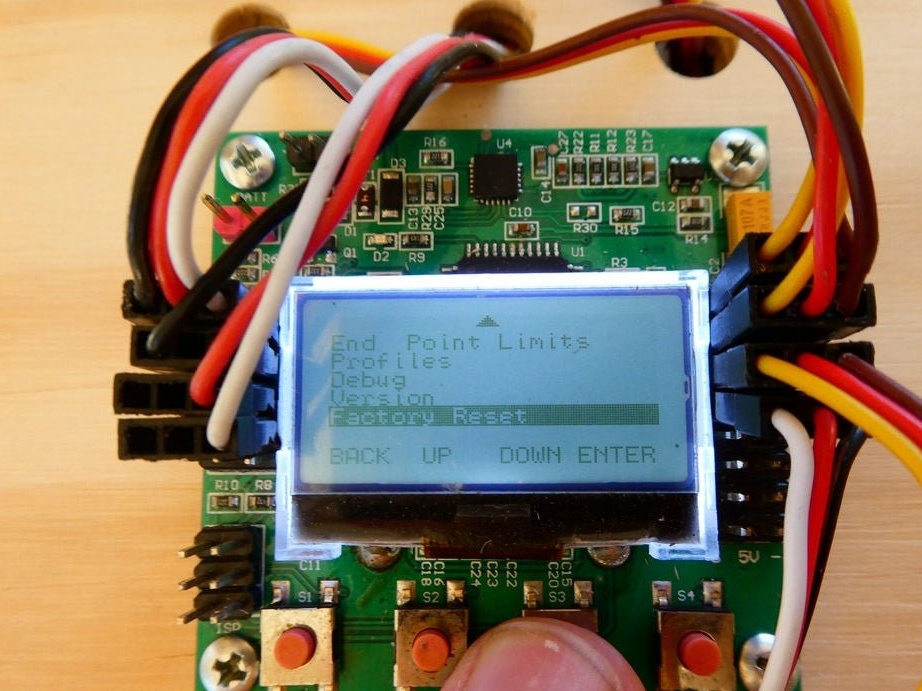
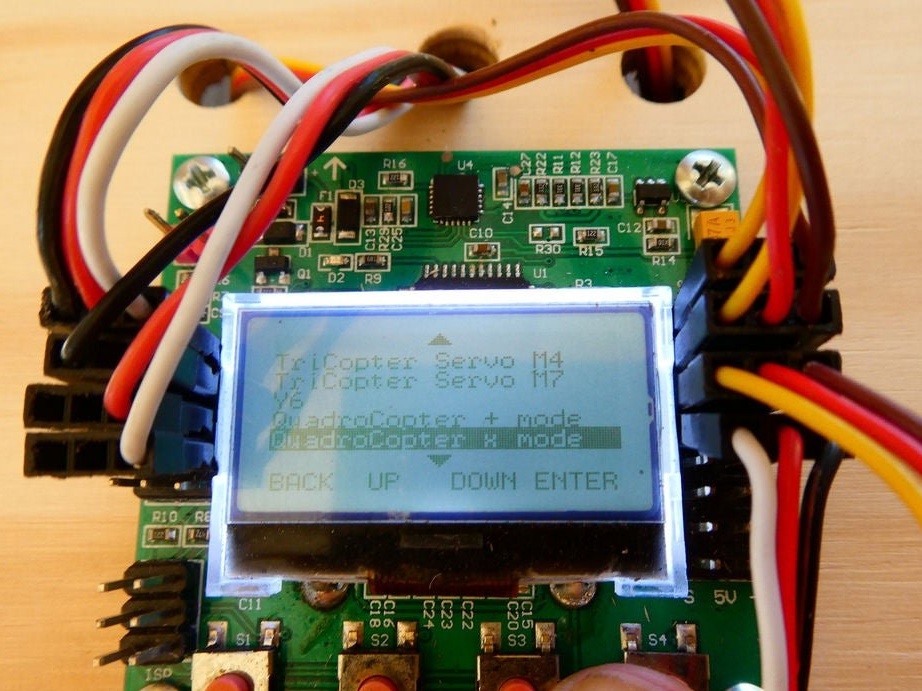
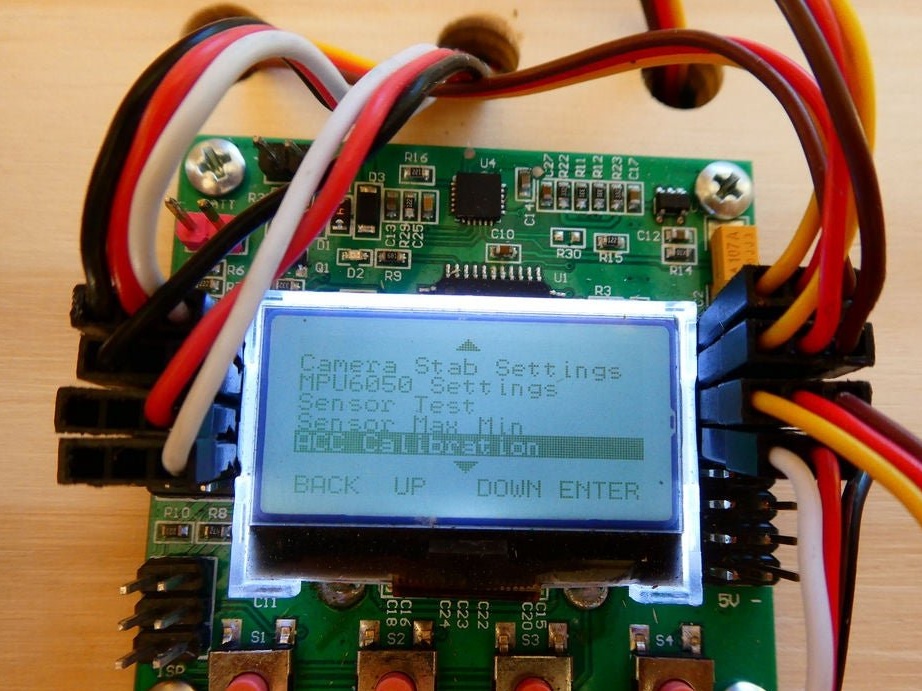
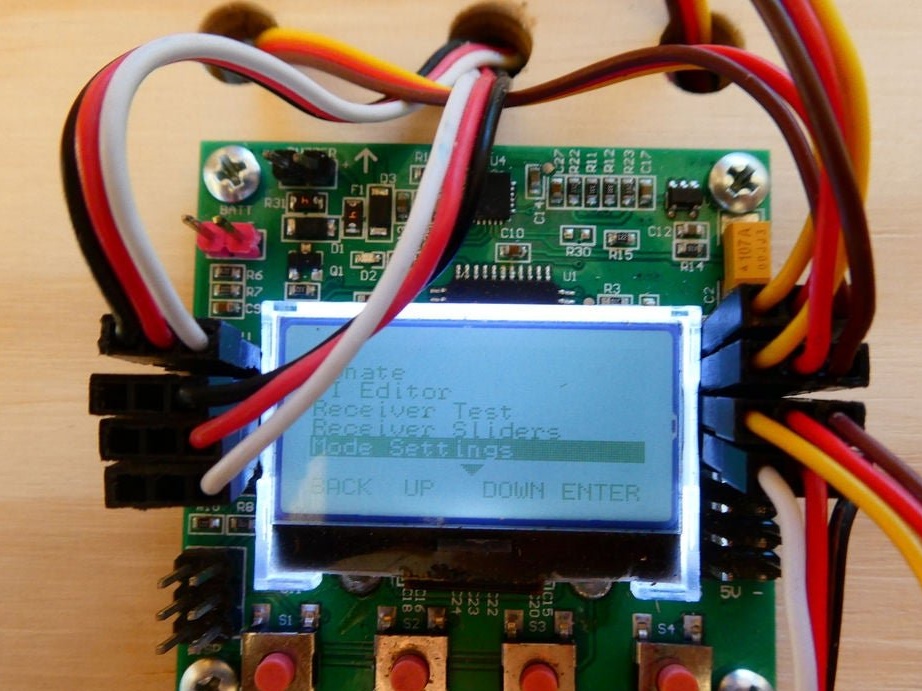
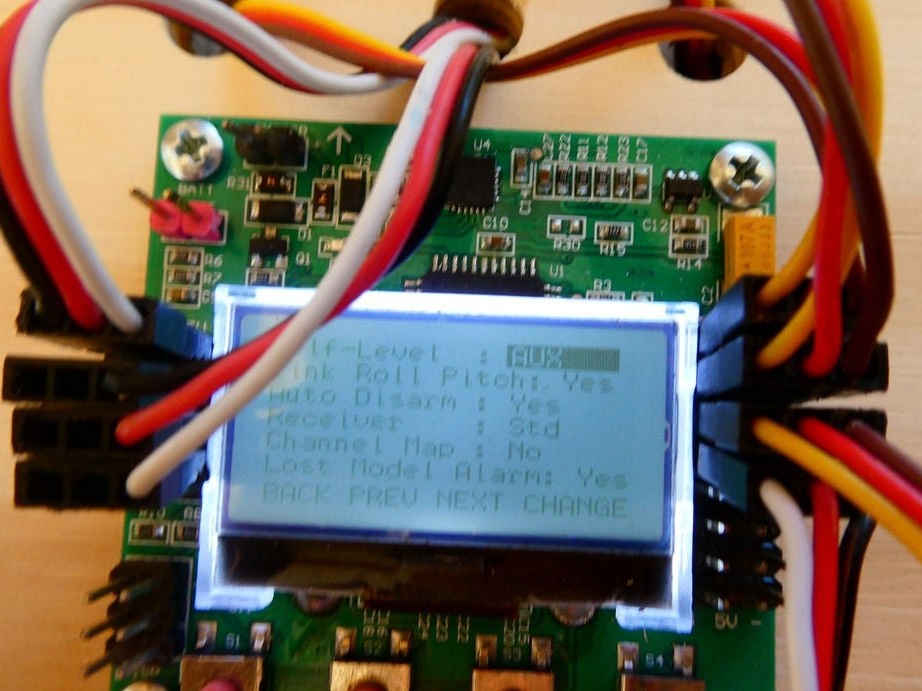
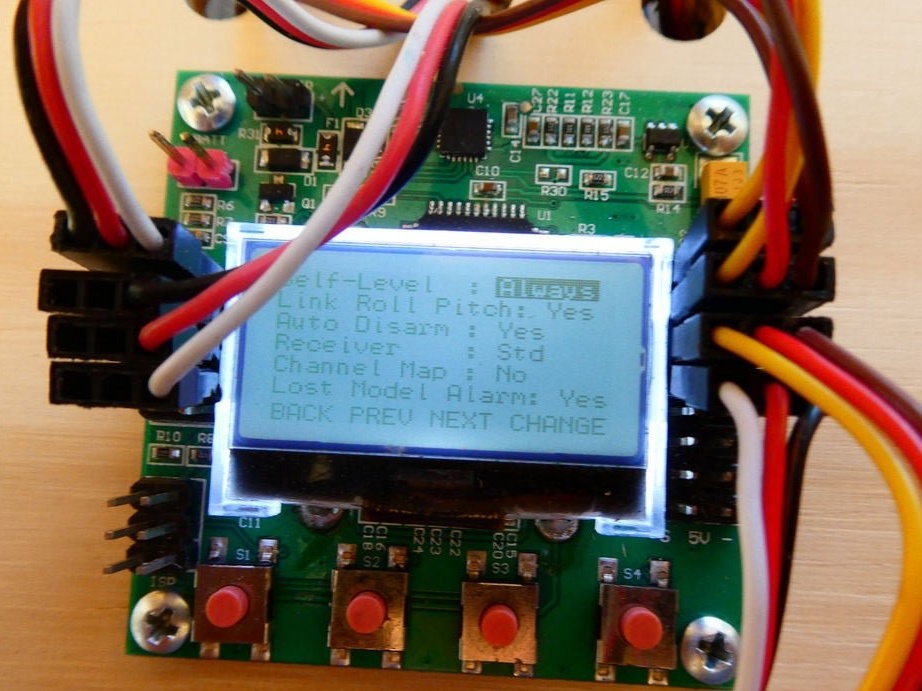
Свържете батерията и контролерът трябва да се зареди. На дисплея трябва да се появи съобщение за грешка. Игнорирайте го и натиснете бутона на менюто. Превъртете надолу и кликнете върху „нулиране“. Тогава трябва да се появи меню за избор на желаната рамка на дроновете. Превъртете надолу, докато стигнете до режим Quadcopter-X и натиснете „приеми“. Натиснете назад и изберете „AUX калибриране“. Поставете дрона върху равна повърхност и натиснете „калибриране“. Когато това е направено, превъртете нагоре до настройките на режима и променете автоматичното ниво от „AUX“ на „Винаги“.
Изключете батерията, включете контролера и след това отново свържете батерията. Контролерът на полета трябва да се включи и да показва SAFE. Преместете се отляво в ляв ъгъл и дисплеят трябва да се промени от SAFE към ARMED,
Стъпка пета: Витла
Затегнете винтовете към валовете на двигателя.


Всичко е готово. И накрая, няколко съвета от майстора.
В началото квадрокоптерът може да изглежда трудно контролируем. Най-добрият начин да започнете полет е да се изкачите на около 1 метър над земята и да летите напред и назад, наляво и надясно, и след това да стартирате квадрокоптер в кръг. Квадрокоптерът не харесва "прозяващ" полет, така че се научете да работите плавно.
Започвайки да летите, дръжте гърба на дрона, обърнат към вас, така че винаги да знаете.
Винтовете от въглеродни влакна са по-здрави от пластмасовите винтове и не се чупят така.


