

Днес авторът на Instructables под псевдонима Techgenie говори за това къде електроника има. И донесе линк към първия, в който не е - само електротехник. Той е по-елегантен и ще бъде обсъден в моя превод.
Ако все още не искате да имате такъв, гледайте видеоклипа и пожелайте това устройство в дома си от първите секунди на гледане:
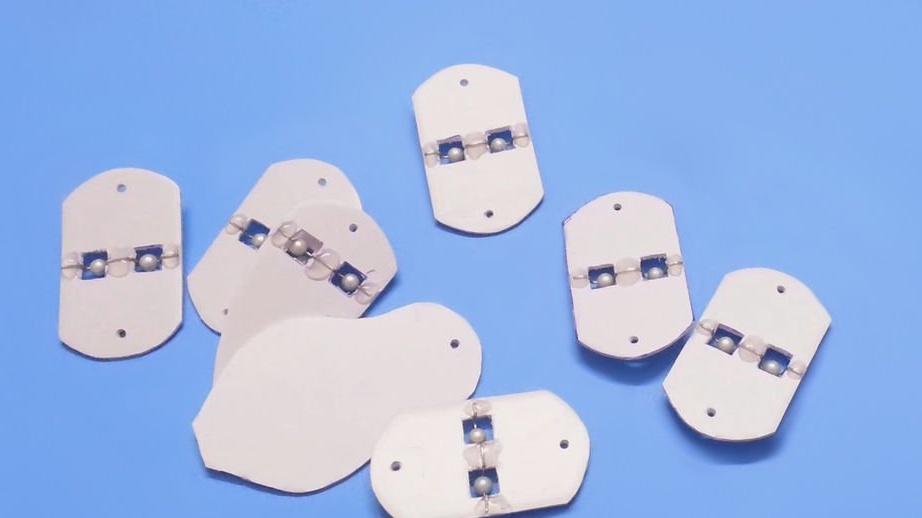
Господарят изрязва връзките на роботизираната змия от картон:
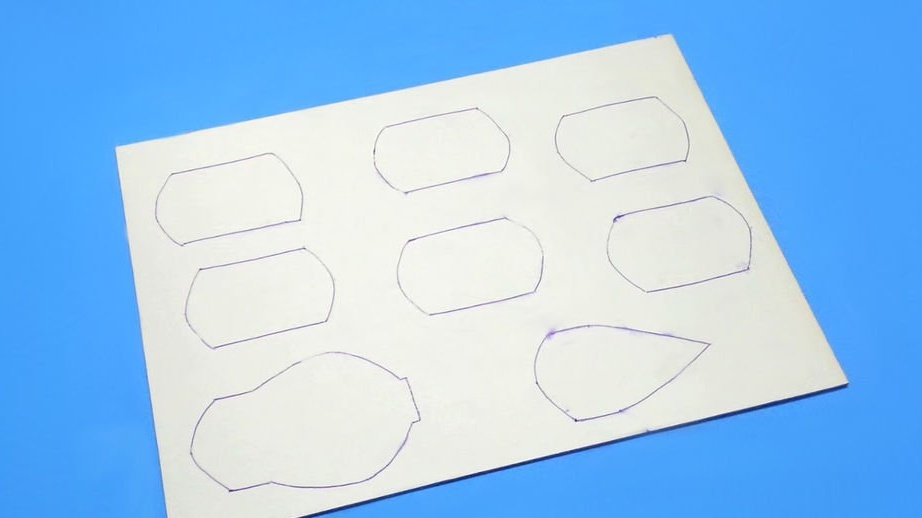
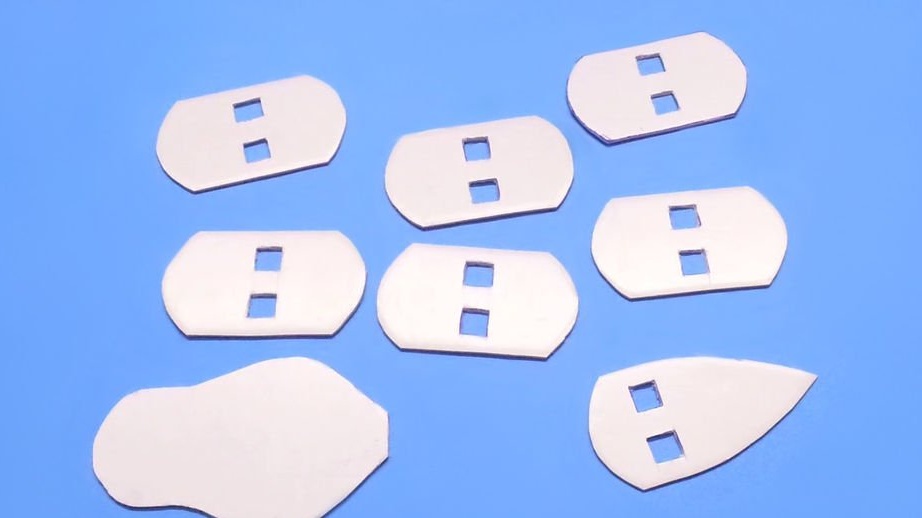
Извадки от лист:

Прави квадратни отвори за ролки в тях:
Кое прави мъниста и хартиени щипки, поздрави "ДУ Василий Билецки":
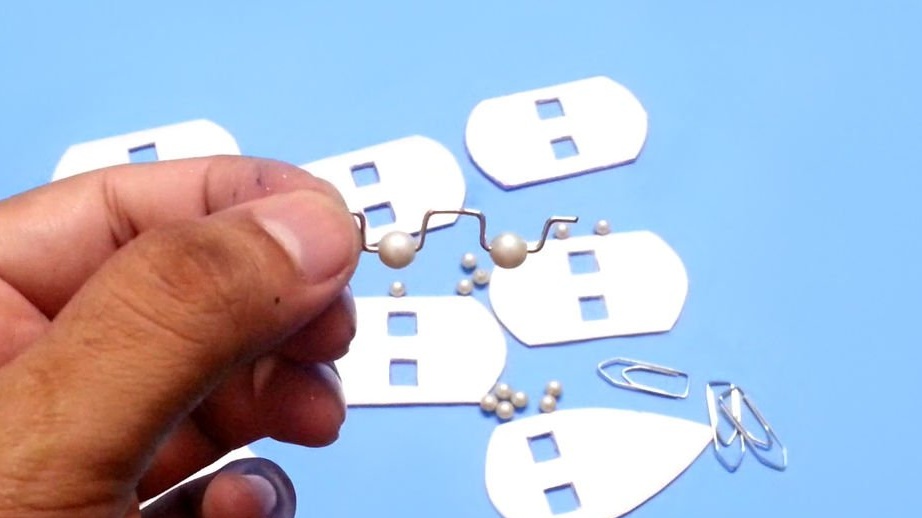
Фиксира оста на ролките с пистолет за лепило, гарантира, че самите ролки не са заседнали с лепило. Пробийте дупки за свързване на връзки:
Прилепва триъгълен държач за двигатели с постоянен ток:

Прилага двигатели, бележки къде да пробиете дупки за валове, свредла, резбови валове, лепилни двигатели:
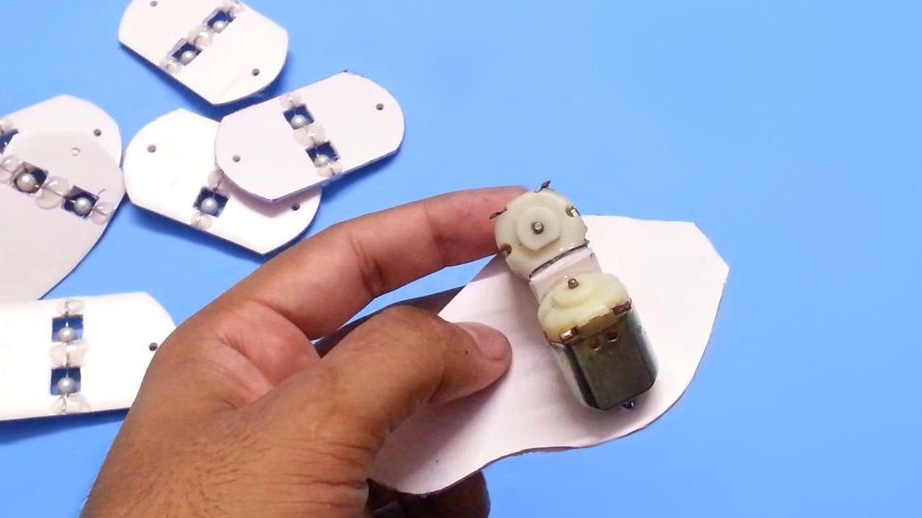
Върху валовете на двигателите прави горещи лепилни топки:
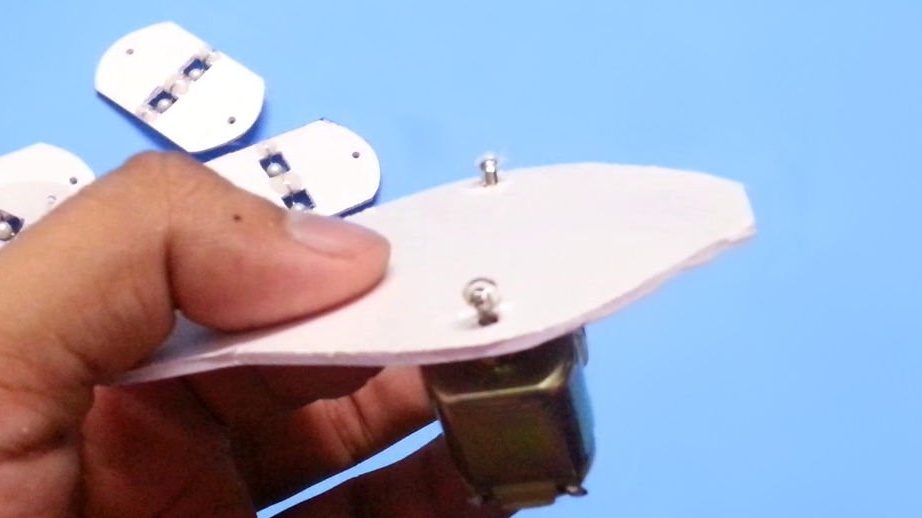
Свързва връзки с ... проводник и бутони:
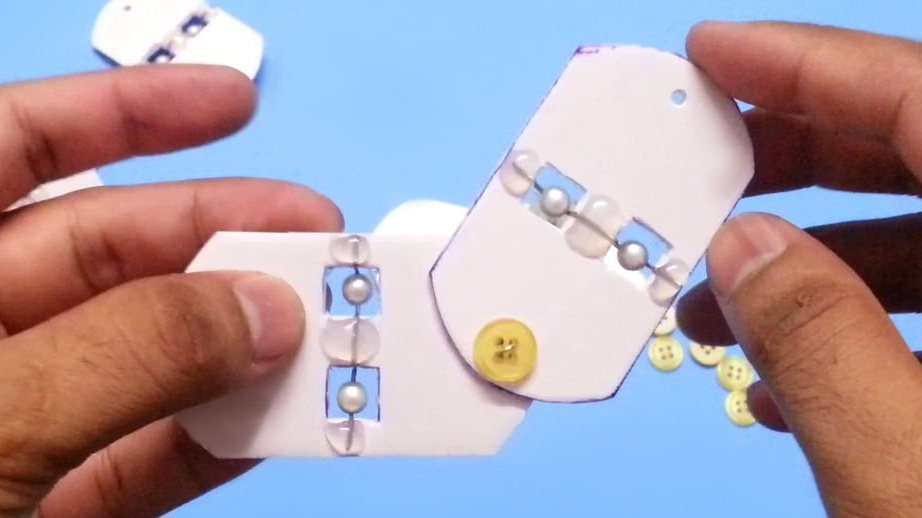
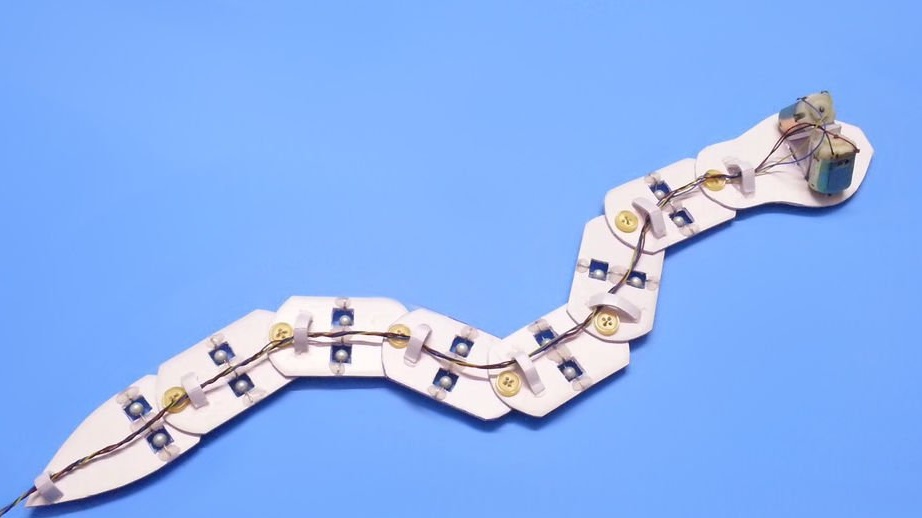
Роботизираната змия е сглобена, но все още е неподвижна:

Той отрязва картонени ленти, взема четирижилен кабел, продавач по два проводника към всеки от двигателите, закопчава се с първата лента:

И останалото:
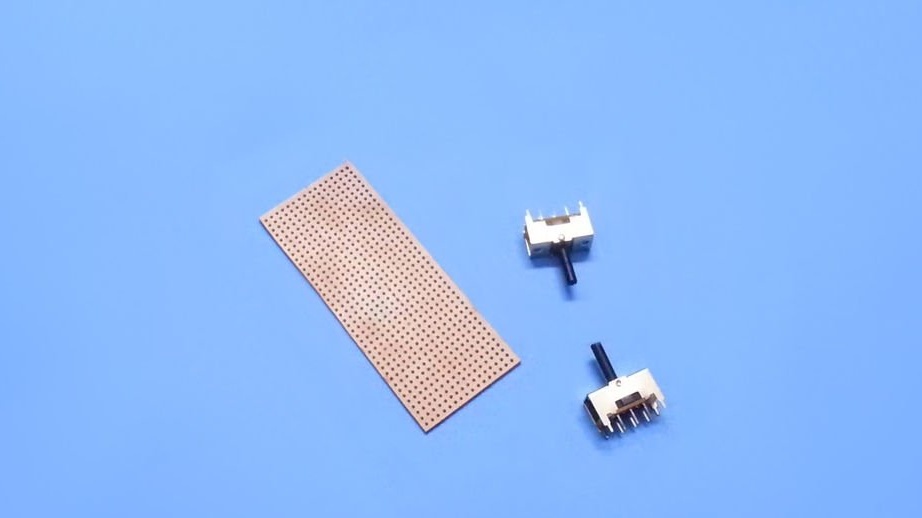
Необходими са два превключвателя на три позиции (средна до изключена) и две посоки, както и парче от дъска от тип perfboard:
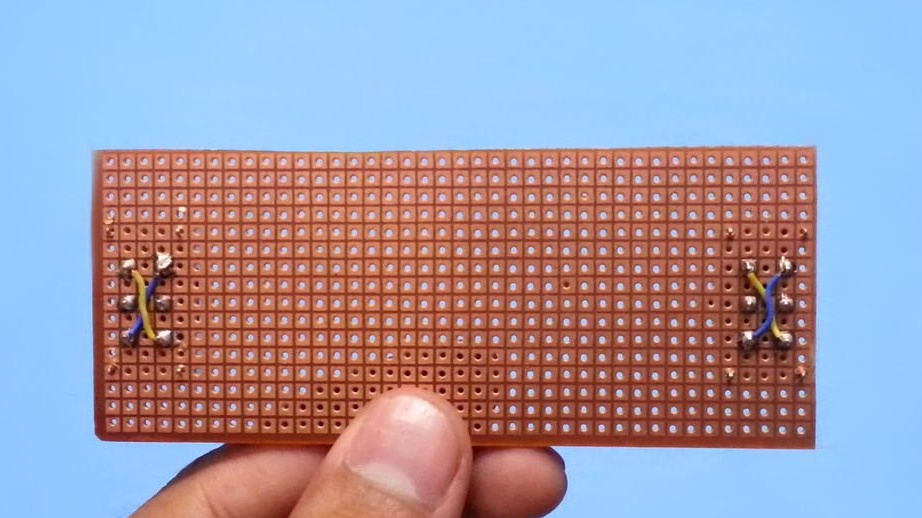
Използвайки джъмпери, превръща и двата превключвателя в обратими:
Той прави пружини за батерията 18650 от щипки за хартия, слага я. Не го правете! Вземете готовото отделение! Използвайте батерията само със защита! Още по-добре, отделение за 2 бр. AA или AAA с подходящи клетки или батерии.
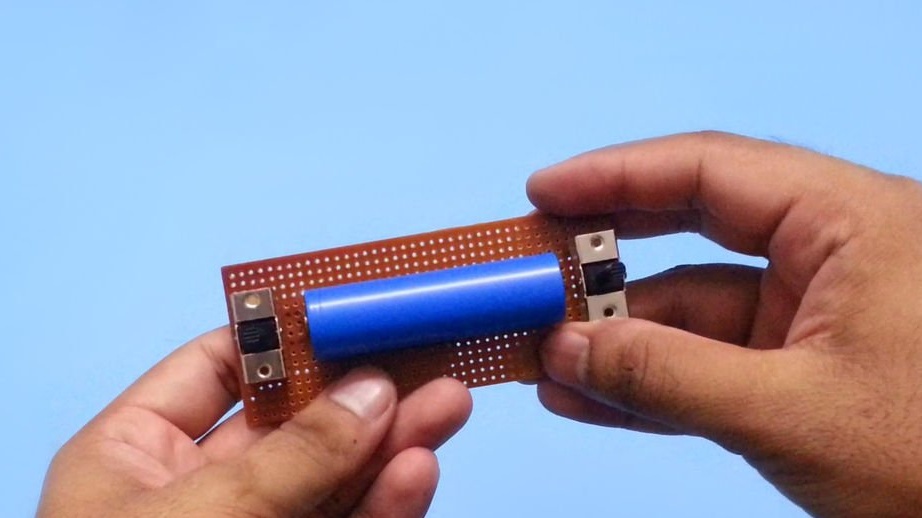
Надлъжните скоби добавят към поддържането на батерията на място:
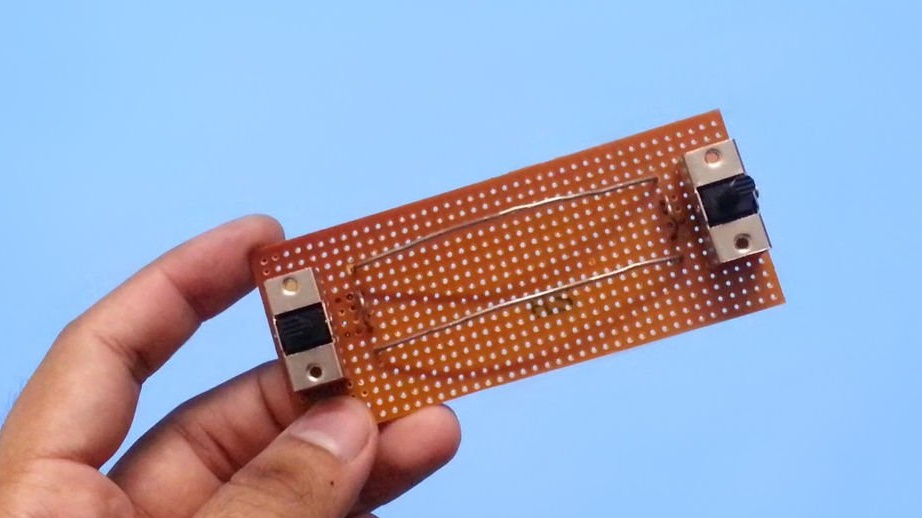
Така че докато задната страна на платката за дистанционно управление изглежда:
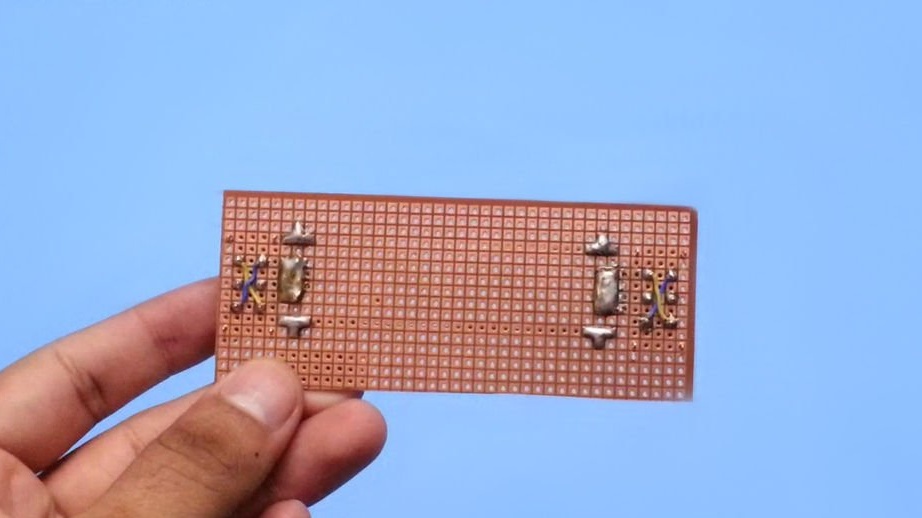
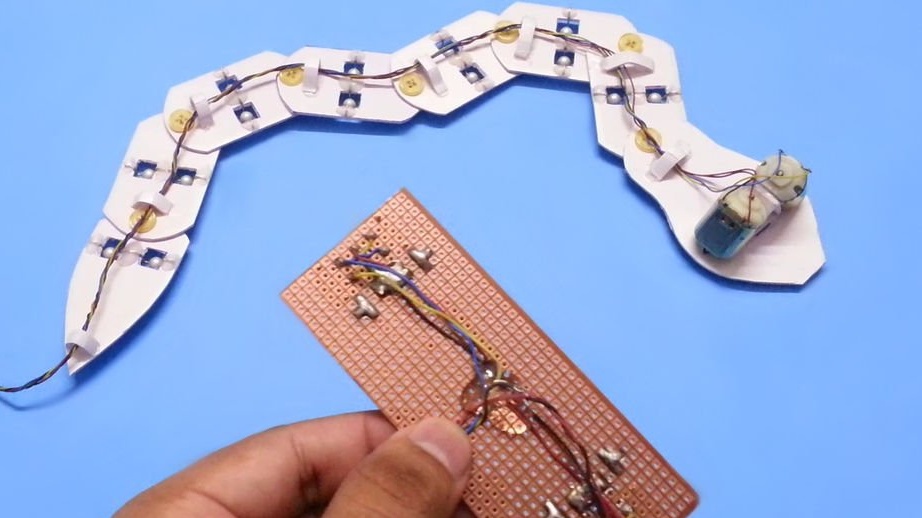
Главният свързва кабела на робоскейпа, осъществява връзки според схемата:

Сега обратната страна на платката за дистанционно управление изглежда различно. Кабелът е фиксиран с горещо лепило, важно е между него и дъската да има изолационен слой от това лепило. Сега тази страна на платката трябва да бъде покрита с диелектрик, тъй като при изключване на двигателите се появяват импулси за самоиндукция.
Всичко е готово:

Поради конструктивните характеристики на роботизаката, със същите позиции на превключвателите, моторите трябва да се въртят в противоположни посоки. Ако това не е така, един от тях трябва да се обърне обратно. След това експериментално изберете позицията на дистанционното управление, в която положението на двата превключвателя напред съответства на движението напред. Двигателите могат да бъдат спрени и обърнати отделно, принуждавайки роботизака да изпълнява различни трикове.