Походката му е много подобна на истинска хлебарка. Когато ходите, тя се люлее малко стъпка уверено напред. Хлебарката има минимум сложни части и е много лесна за производство.
1.Видео тест
Видеото показва механична хлебарка от различни ъгли по време на нейната работа и движение.
2. Характеристики и характеристики.
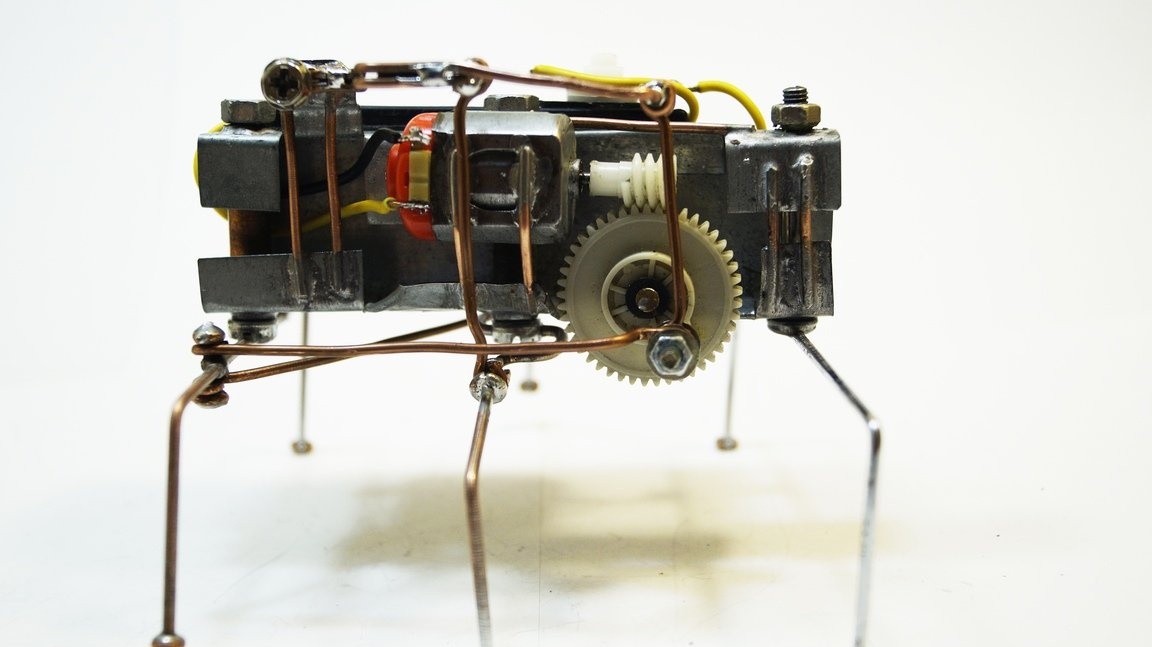
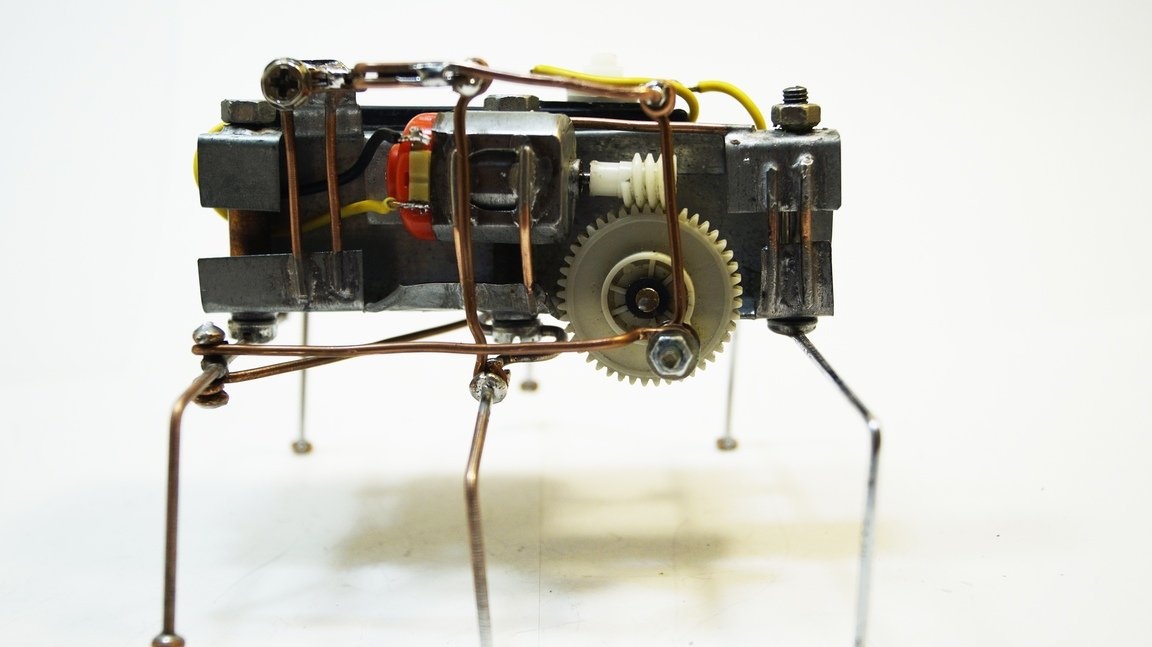
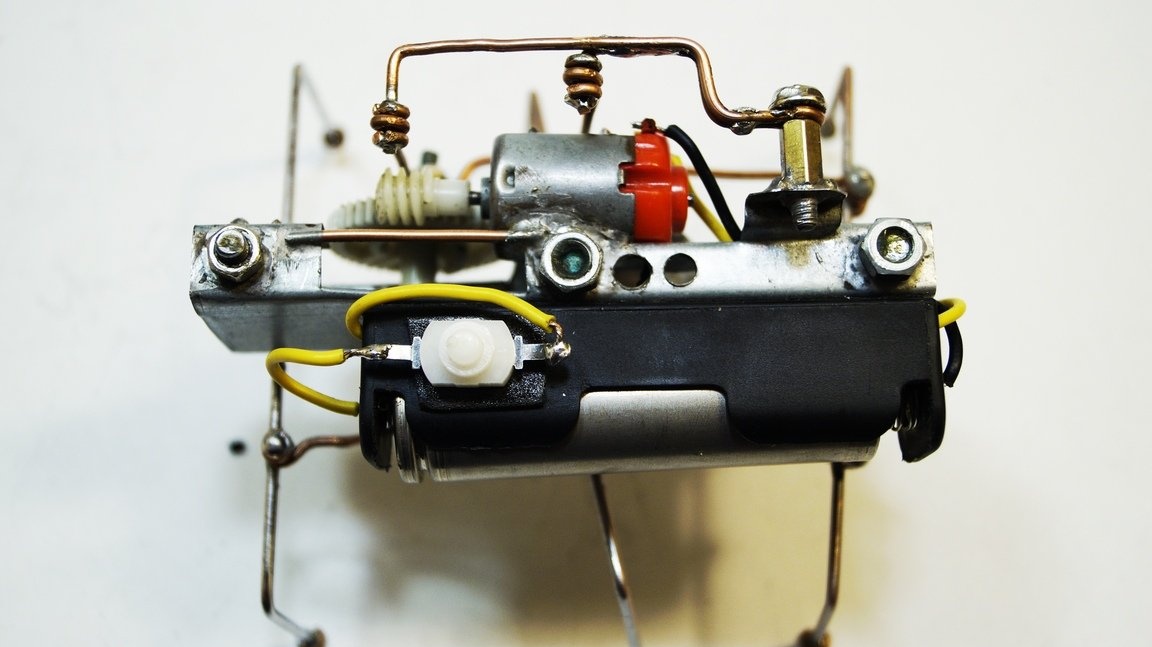
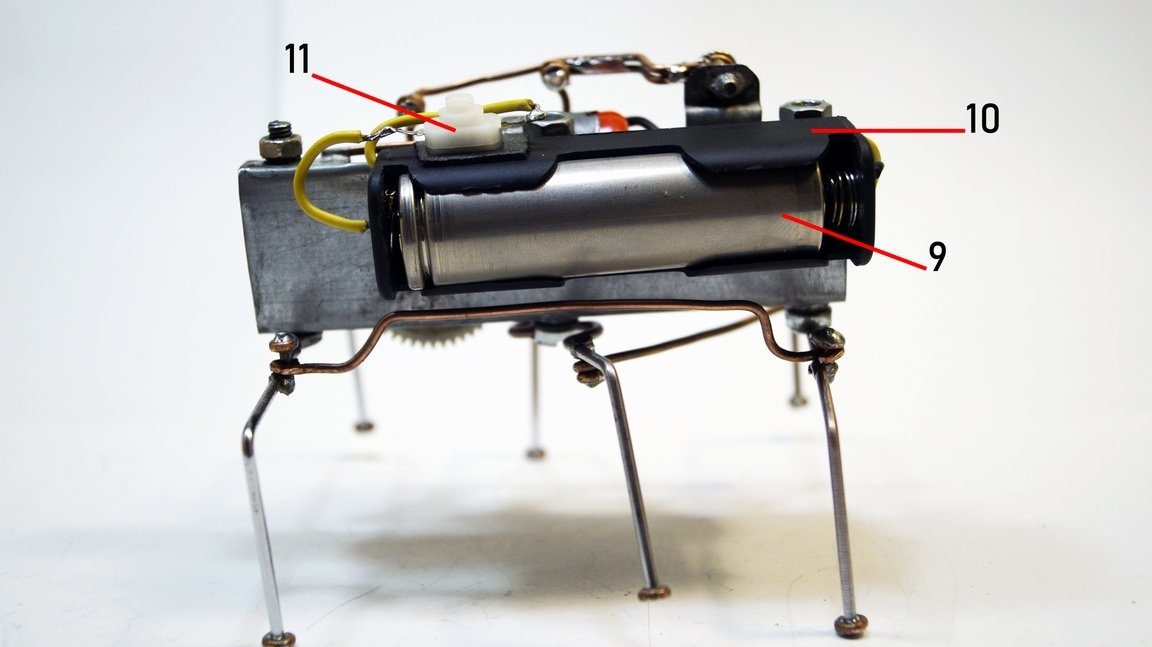
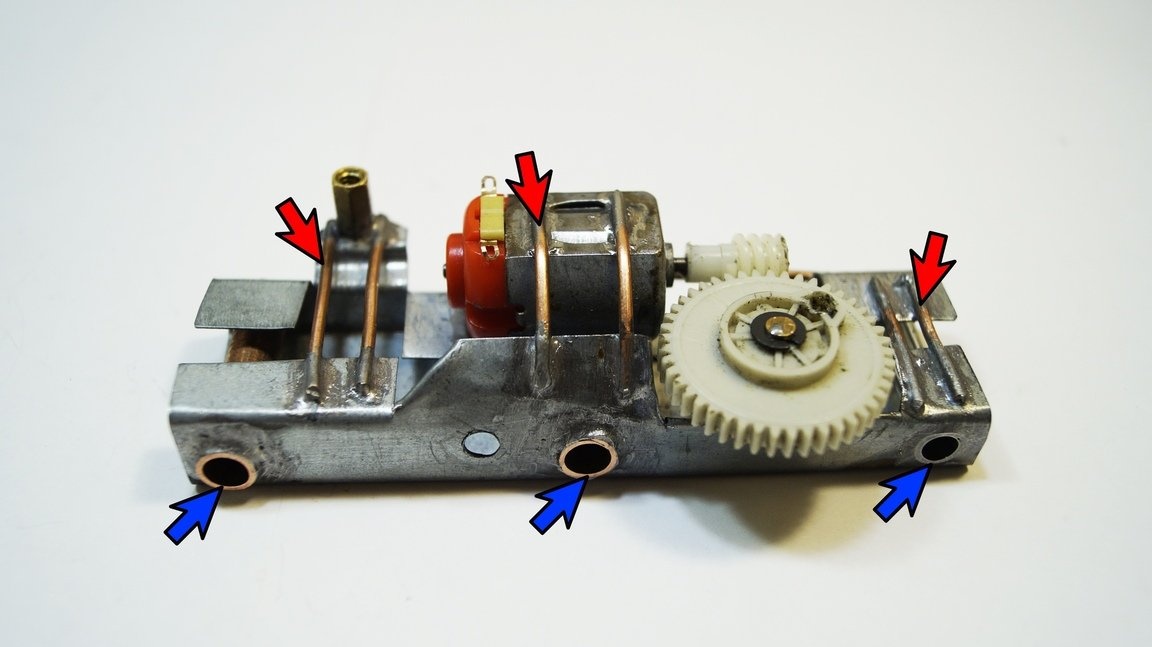
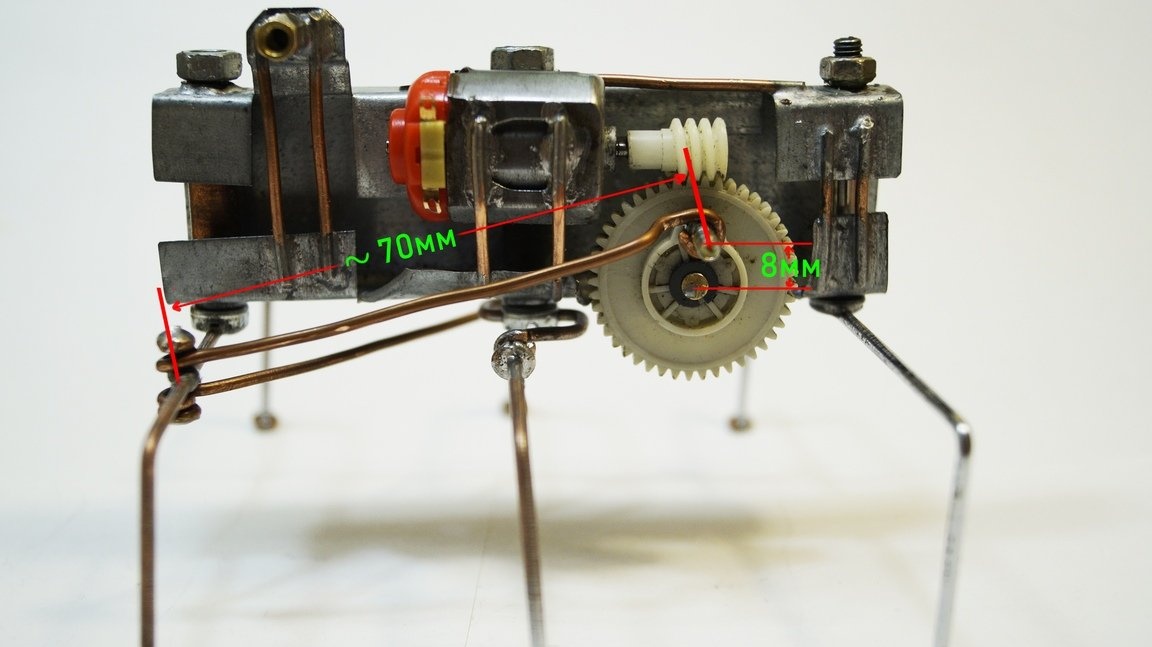
На снимка 1. Показана е механичната хлебарка, изглед отстрани. На снимка 2. Показан е изгледът отгоре.
Снимка 1.
Снимка 2.
СТРОИТЕЛСТВО. Като рамка е използван профилът ppn-2 30X20. Двигателят и другите съединения са монтирани чрез запояване. Лапите на хлебарка се закрепват с болтове M6. Бутонът за захранване и отделението за батерията са залепени на двустранна лента. Като сцепление за задвижване на краката на хлебарка е използван меден кабел със сечение 2,5 мм.
ДВИГАТЕЛ И КРАНКИ. Оста на двигателя и манивелата са споени към рамката на POS-61, спояваща киселина ZnCl (цинков хлорид). За увеличаване на въртящия момент и намаляване на размера се използва червячна предавка.
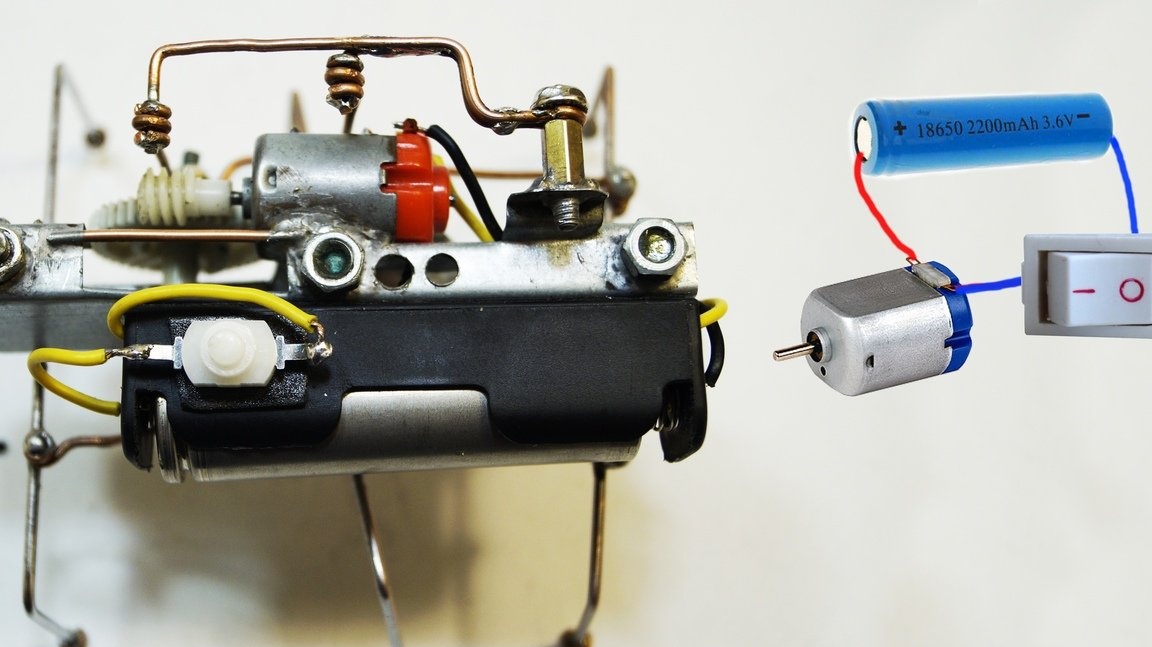
POWER. Като мощност на робота е използвана батерия 18650. Източникът на захранване е 3,7 V.
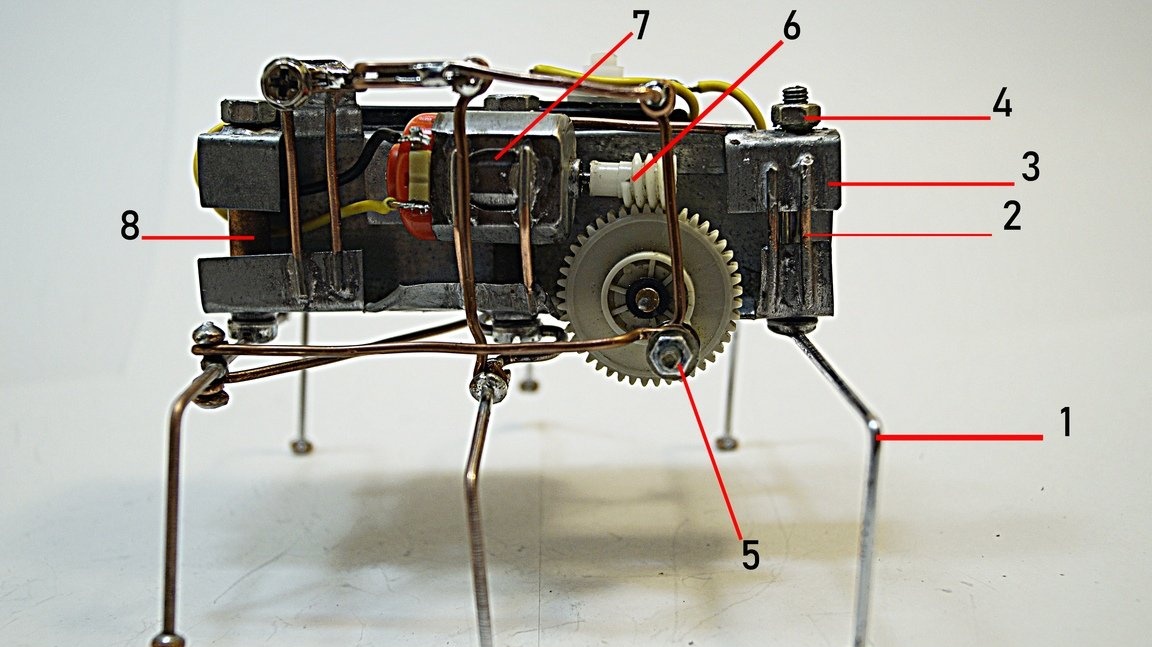
ПОДРОБНОСТИ ЗА ПРОИЗВОДСТВОТО НА РОБОТ
1. Лапи на хлебарка.
2. Укрепващото устройство.
3. Рамката.
4. Оста на лапите на хлебарка.
5. механизъм на коляновия вал.
6. Червей задвижване.
7. Електродвигател F130 5 V.
8. Оста на ръкавите на лапите на хлебарки.
9. Тип батерия 18650, 3,7 V.
10. Отделение за батерията
11. Бутон за захранване
3. Принципът на работа.
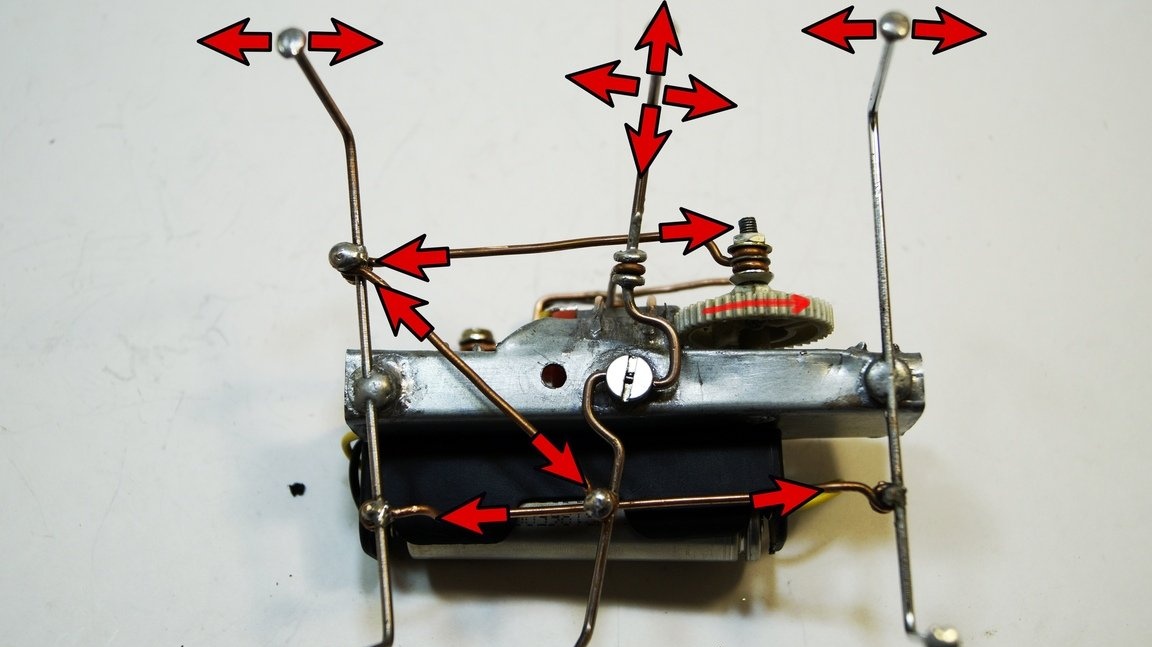
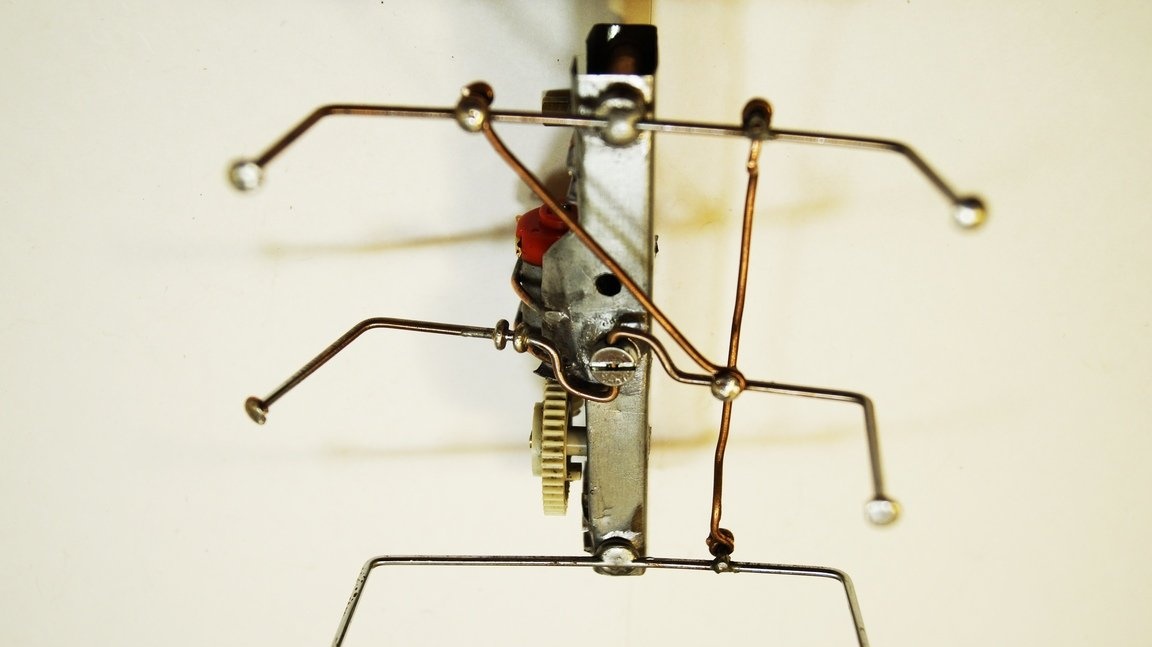
На снимка 3. 4. Показан е принципът на работа на механичните части на хлебарка. Струва си да се помни, че предните и задните крака на робота се движат хоризонтално, а средните крака се движат вертикално и хоризонтално.
Захранването се подава към електродвигателя чрез ключа, моторът завърта коляновия механизъм. Манивелата задвижва предната лапа чрез сцепление, съответно от предната лапа, тягата избутва задната лапа (те се движат синхронно). Средната двойка лапи е свързана с първата двойка, напречно (те се движат в антифаза).
За да се движи вертикално средната двойка лапи, над мотора е монтиран лост, който се придвижва от механизма на коляновия вал.
Foto.3
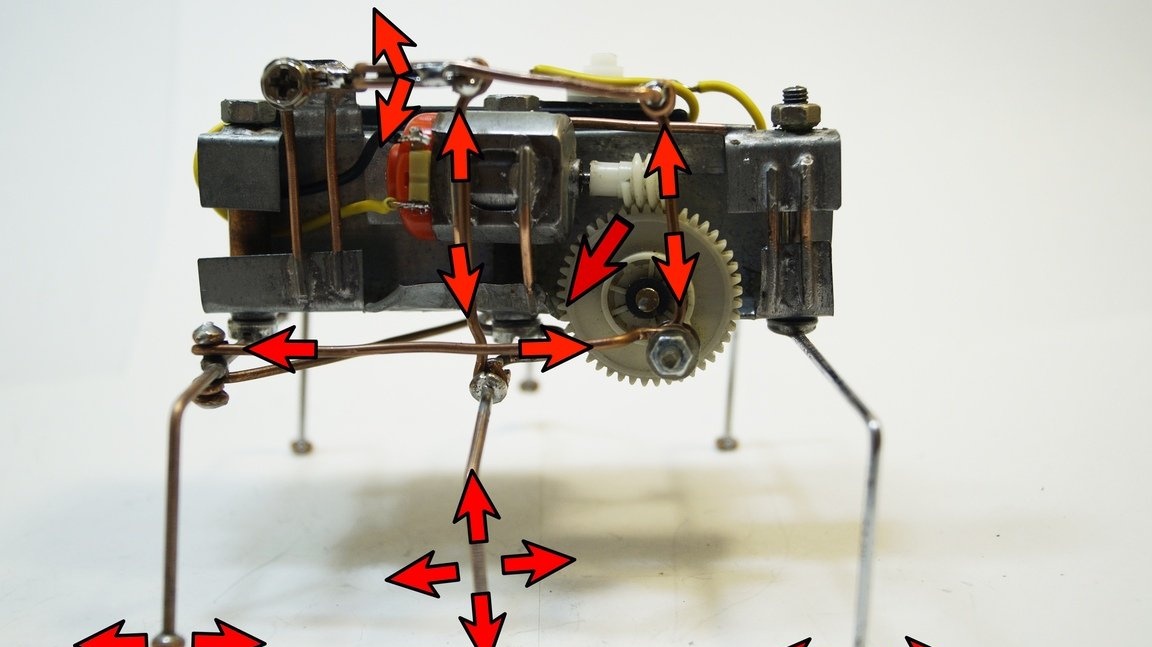
Foto.4
4. Материали и инструменти.
1.Спояващо желязо 50W.
2. Отделение за батерия
3.Prysoy POS-61.
4. Медна тел със сечение 2,5 мм.
5. Запояваща киселина ZnCl (цинков хлорид)
6. Електрически мотор F130 5V.
7. Ножици за метал.
8. Задвижване с червей.
9. Клещи.
10. Стоманена тръба, диаметър 80мм.
11. Акумулаторна батерия 18650.
12.Профил PPN-2 30X20.
И също така: (бутон за захранване, двустранна лента, монтажен проводник)

5. Инструкции за монтаж.
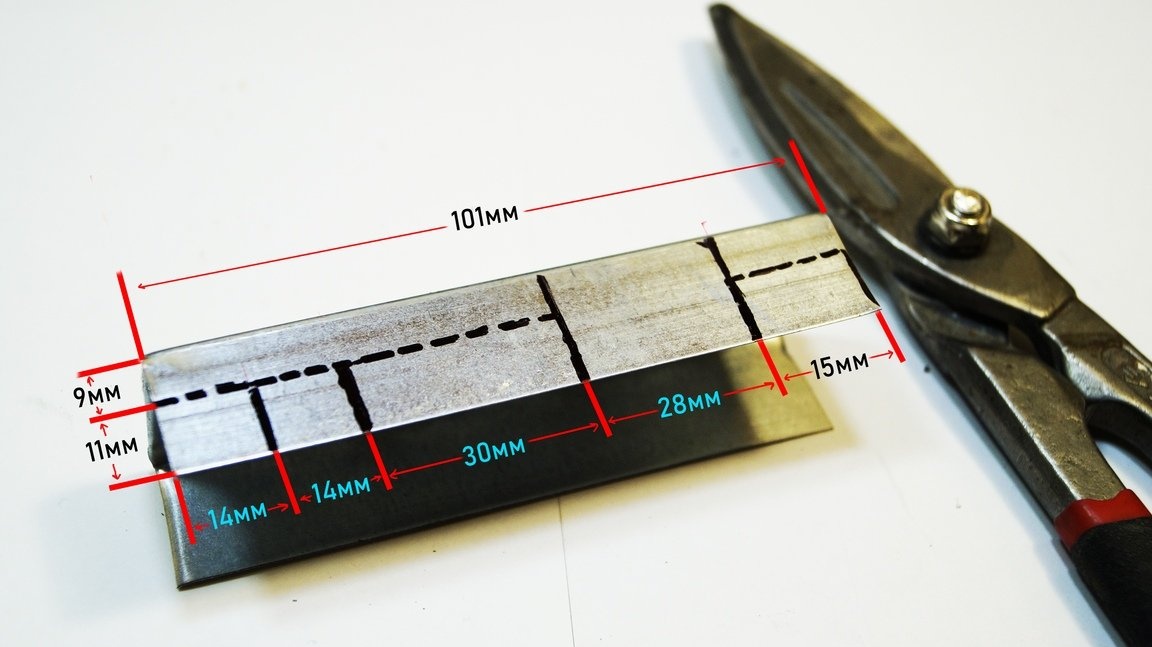
1.Изработка на рамка за хлебарки.
Начертайте маркировката на профила, както е посочено на снимка 5.
Снимка 5.
Използвайки ножица за метал, ние изрязваме и огъваме детайла с клещи, както е показано на снимка 6. Маркирайте долната част, както е показано на снимка 6. Огънете профила с клещи, както на снимка 7.
Снимка 6.
Снимка 7.
2. Електрически мотор и коляновата ос.
Следващата стъпка е да спойкате електродвигателя към рамката. Двигателят преди запояване ще трябва да бъде разглобен. Заливаме корпуса на мотора и рамката с поялник Photo 8.
Припояваме корпуса на електродвигателя и рамките заедно, затопляйки добре частите с поялник, притискайки ги една към друга Снимка 9. !!! Бъдете внимателни, ДЕТАЙЛИ ТОПЛО ОТОПЛЕНИ !!!
Снимка 9.
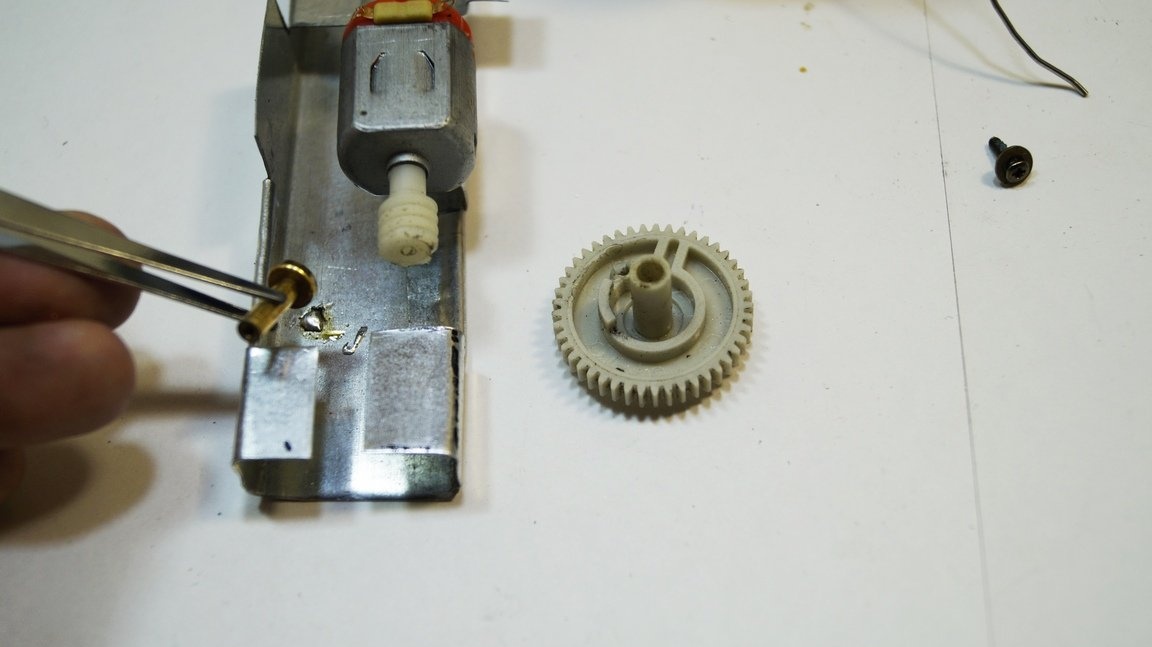
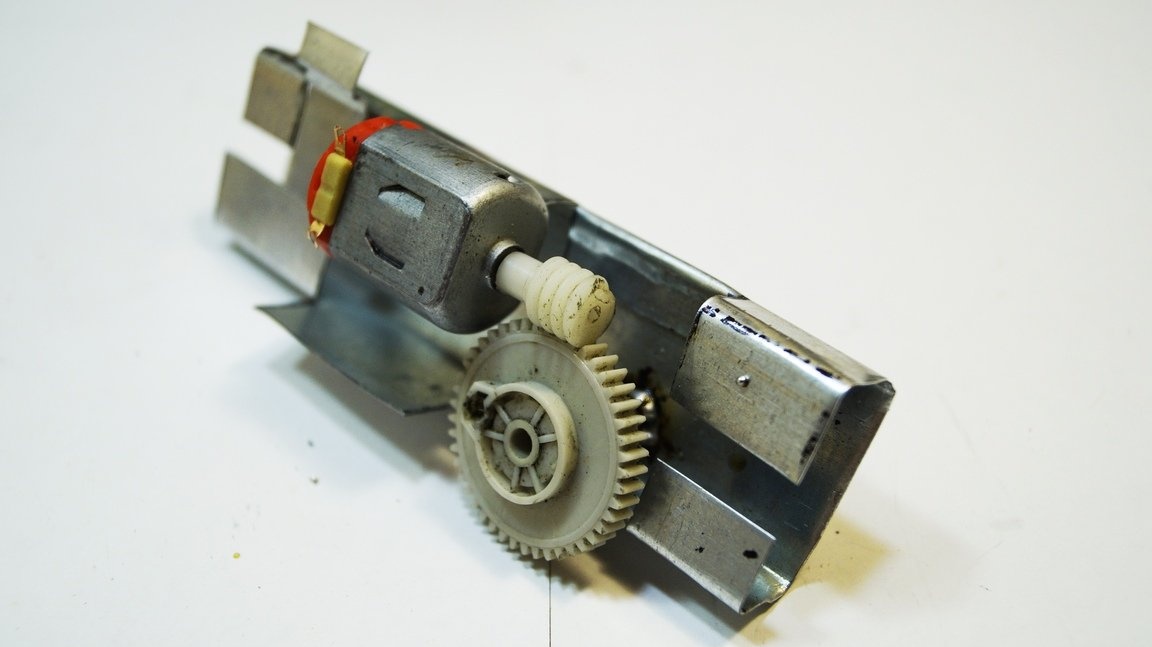
Поставяне назад на електродвигателя. Припояваме оста на коляновото колело на място, това се прави експериментално. Червячният механизъм трябва да бъде добре поставен заедно, зъбните колела не трябва да бъдат изкривени. Снимка 10.11.
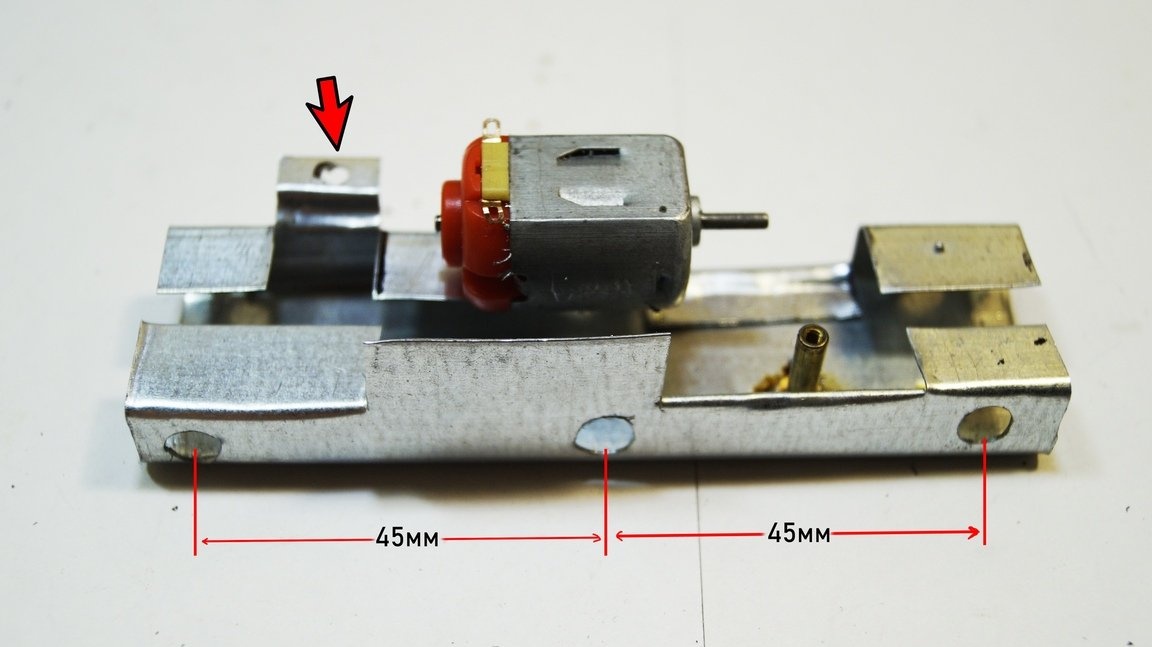
3. Дупки за краката на хлебарка.
За да прикрепите лапите на хлебарки към рамката, трябва да пробиете дупки с 8 мм свредло. Пробиваме дупка в ухото зад електрическия мотор с 3.2 мм бормашина
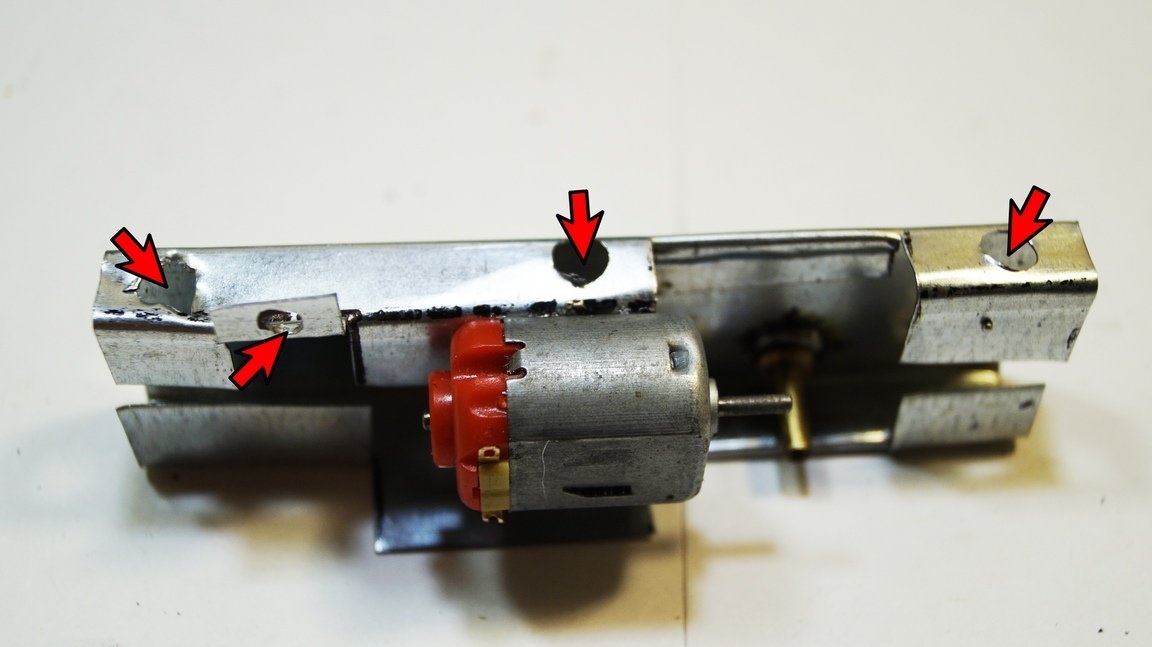
Ние също спойка гайка в ухото зад електромотора. Лостът, отговорен за повдигане на средните лапи по вертикалната ос, ще бъде прикрепен към тази гайка
За да се укрепи конструкцията на рамката, укрепващите елементи бяха споени с медна жица 2,5 мм.
8 мм втулки също бяха споени към местата на закрепване на лапите на хлебарки Снимка 15.
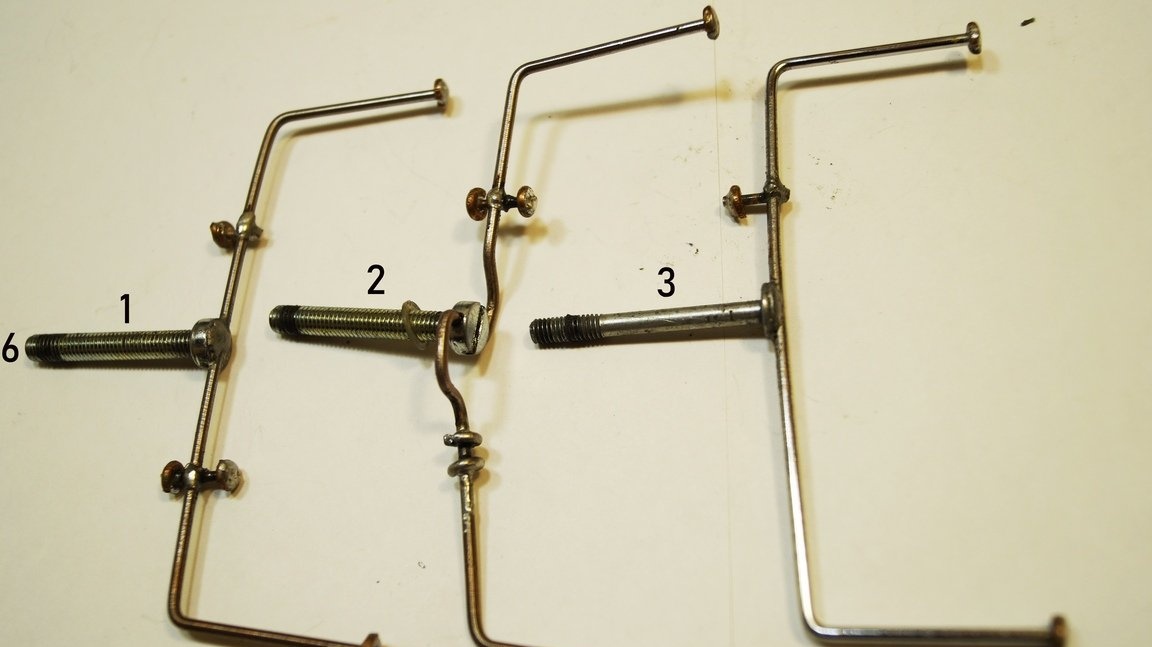
4. Лапи на хлебарка.
Като лапи за хлебарки се използва метална тел с диаметър 3 мм, тя е споена към главата на болта M6 Снимка 16. Средната двойка лапи за хлебарки е направена по различен начин, в главата на болта се пробива дупка по диаметъра на жицата. Жицата е огъната под формата на буквата „S“, това ще даде възможност краката на хлебарка да се движат вертикално.
Снимка 16.
Снимка 17.

За да фиксирате прътите, към лапите на хлебарка се запоява медна жица с дължина 2,5 мм дължина 12 мм, към краищата й са запоени медни пръстени. Пръчките са изработени от медна тел с напречно сечение 2,5 мм, размерите са приблизителни, препоръчително е телта да се огъва, така че в бъдеще да има възможност за регулиране по дължината на снимка 18.
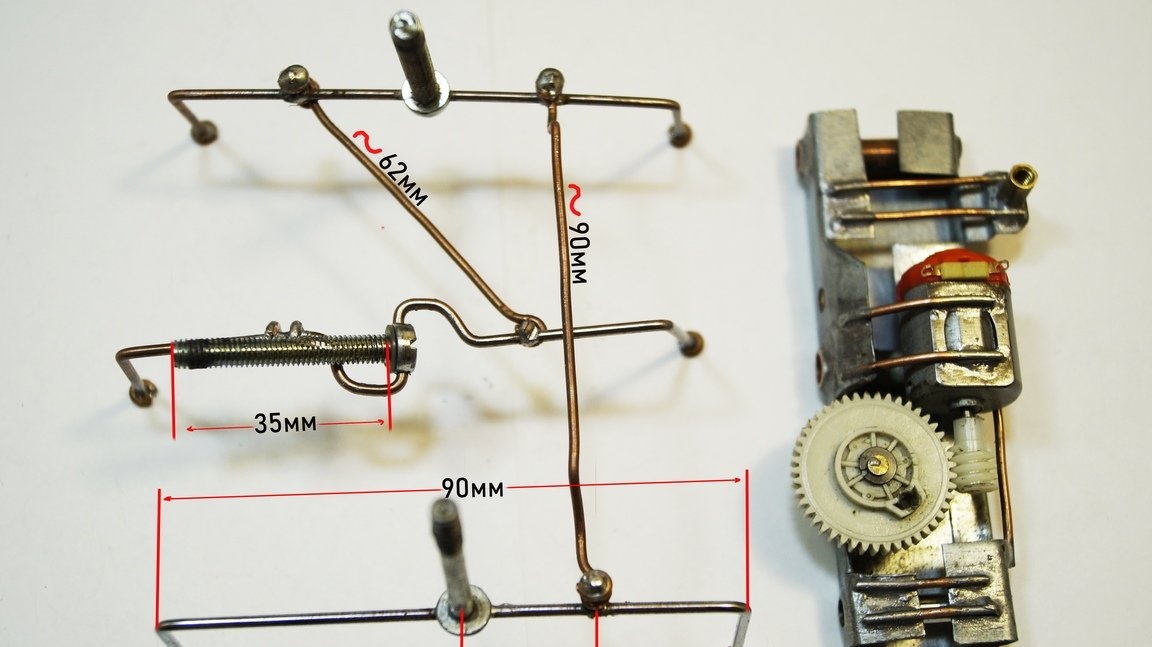
Снимка 19 показва изглед отдолу, с лапи, монтирани върху рамката.
Установяваме сцепление от коляновия механизъм към предните крака на хлебарка. Правим тяга с подгъва за възможността да я регулирате. Радиус на крана 8 мм. Снимка 20.
Правим лост за придвижване на средните лапи вертикално от медна тел Снимка 21.22.
Това завършва механичната част на хлебарка.
Снимка 21.

Снимка 22 показва местоположението на лапите в долната позиция на вала на коляновия механизъм.
Снимка 22.

5. Електрическата част.
Залепете отделението за батерията на двустранна лента към рамката на хлебарка. Залепете бутона за захранване на отделението за батерията. Припояваме всички елементи на Снимка 23.
Роботът - хлебарката е готова !!!