
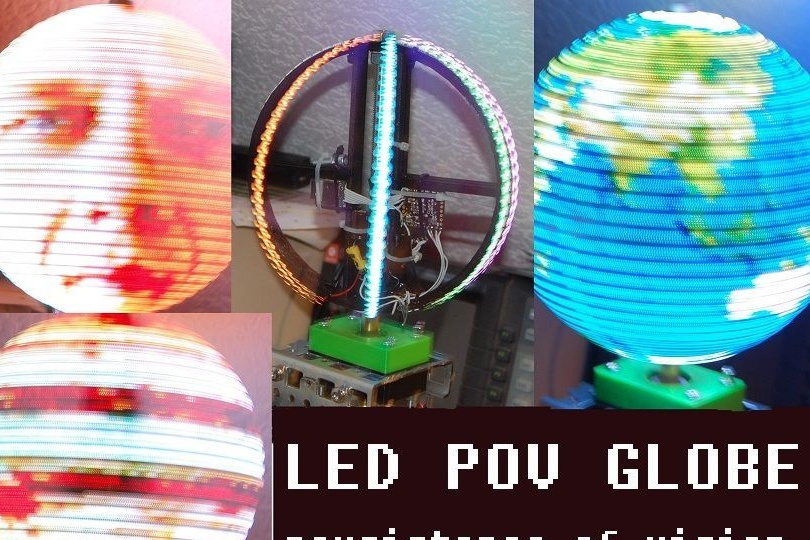
Този урок е за това как да се изгради POV глобус с по-малко. електронен компоненти, отколкото други подобни устройства. Чрез използването на RGB светодиоди с интегриран APA102 контролер. Това ще ви спести запояване на многобройни проводници. Можете да прочетете повече за тях. Тези светодиоди не се нуждаят от допълнителен драйвер. Те са свързани директно към микроконтролера по два начина. Това ви позволява да превключвате светодиоди много бързо. За да получите стабилна картина, SPI синхронизацията идва с честота 10 MHz. Друг плюс на този дизайн е използването на флаш карта, която съхранява изображението във формат BMP.
1 Необходими материали

За оста на земното кълбо ще ви трябва:

1. Шпилка с резба M8 и дължина 250 mm
2. Гайка М8
3. Месингов ръкав с дължина 10 мм и 100 мм
4. Пластмасови шайби 8 мм 2 броя (включени STL файлове)
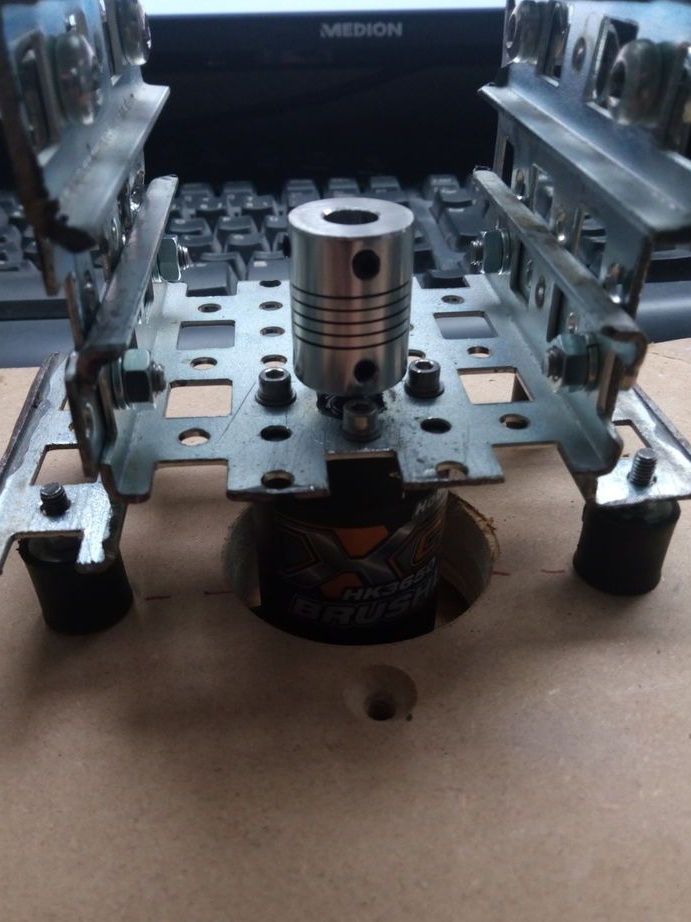
5. съединител за тези, които ще използват стъпковият двигател NEMA 17
За да захранвате LED пръстена на вала, ще ви трябва
1. сачмен лагер 6300 (10x35x11)
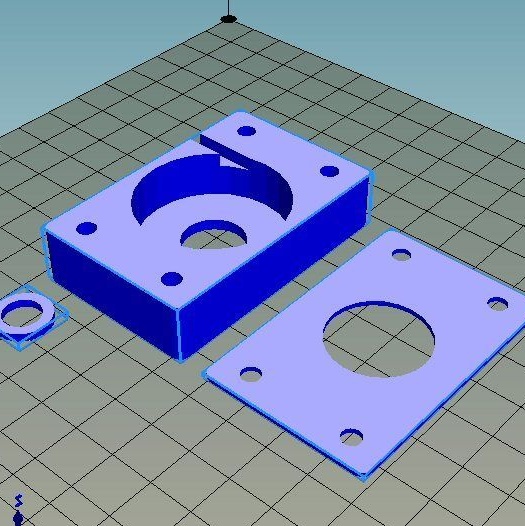
2. две скоби за лагери. Отпечатано на 3d принтер или изработено от дърво.
3. Четири болта M4x40 с гайки
4. Съвети за проводници 2 бр 8мм
5. с диаметър на вала 5 мм
6. 4 болта M4 за монтаж на двигателя
7. може би фен на него.
Като алтернатива можете да използвате всеки двигател с правилния контрол на въртящия момент и скоростта. Използваният в този дизайн мотор има максимален въртящ момент при ток 50А, но максималната консумация на ток по време на работа е само 18А.
За да управлявате драйвера на сервомотора, използвайте
1.
2. два бутона
Захранване 12V за мотор и 5V за светодиоди. Като захранване можете да използвате стария модул от компютъра. Можете да закупите 12V / 5A захранване и да се свържете към него
За LED пръстена ще ви трябва:
1.664 светодиоди 2 ленти от 32 броя
2. Кондензатор 1000µF 10V
3. Датчик на Хол и магнит
4. Изтеглящият резистор 1k, 10k
5. Пръстенът трябва да бъде отпечатан на 3D принтер или да използва парче PVC тръба
6. Пластмасови връзки (100 мм)
7. Добро лепило, което се слепва и не се разминава с 2500 оборота в минута
Ще ви трябва и микроконтролер Parallax Propeller. Или можете да използвате друго модела контролер, но допълнително вземете такса за. Този контролер е програмиран и мига толкова лесно, колкото Arduino, Ще ви трябва USB-TTL адаптер, за да програмирате и двата контролера.
Жилища.
Корпус за домашно Можете да вземете всеки достатъчно твърд. Най-важното е, че можете безопасно да закрепите двигателя и лагерите.
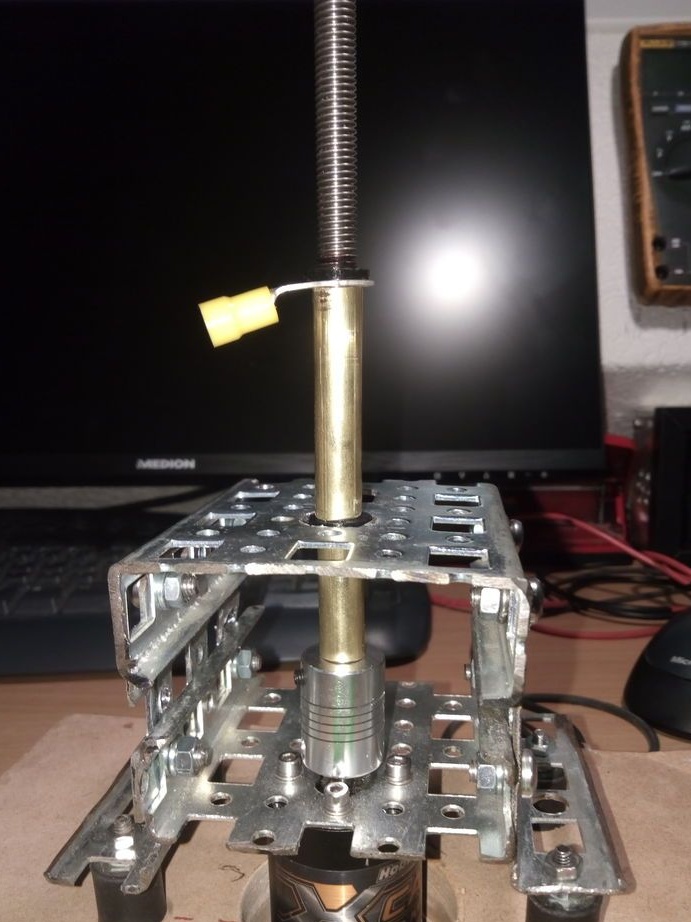
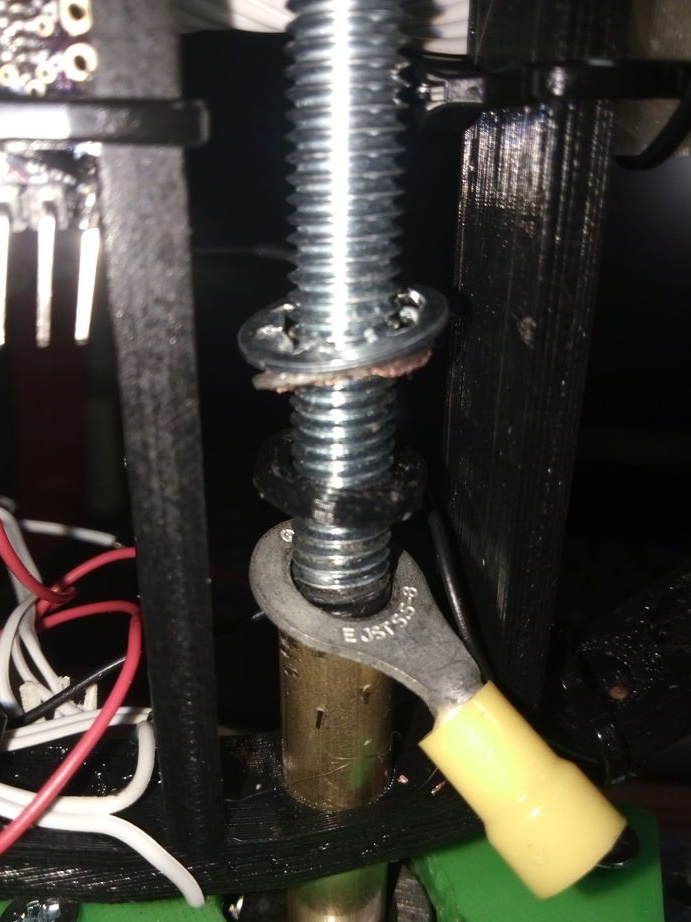
За задвижващия вал се използва шпилка с дължина 250 мм.Дължината на месинговите втулки е 50 и 30 мм. Зависи от размера на пръстена и дължината на вала. Горната и дългата втулка трябва да бъдат изолирани от шпилката, защото се използва за захранване плюс мощност към светодиодите. За да направите това, увийте електрическа лента върху фиби за коса или използвайте термосвиване, ще са необходими и две пластмасови шайби. Втулката ще трябва да бъде пробита до 8,5-9 мм, в противен случай няма да се побере. Другият ръкав заедно с пръта образува отрицателен контакт.
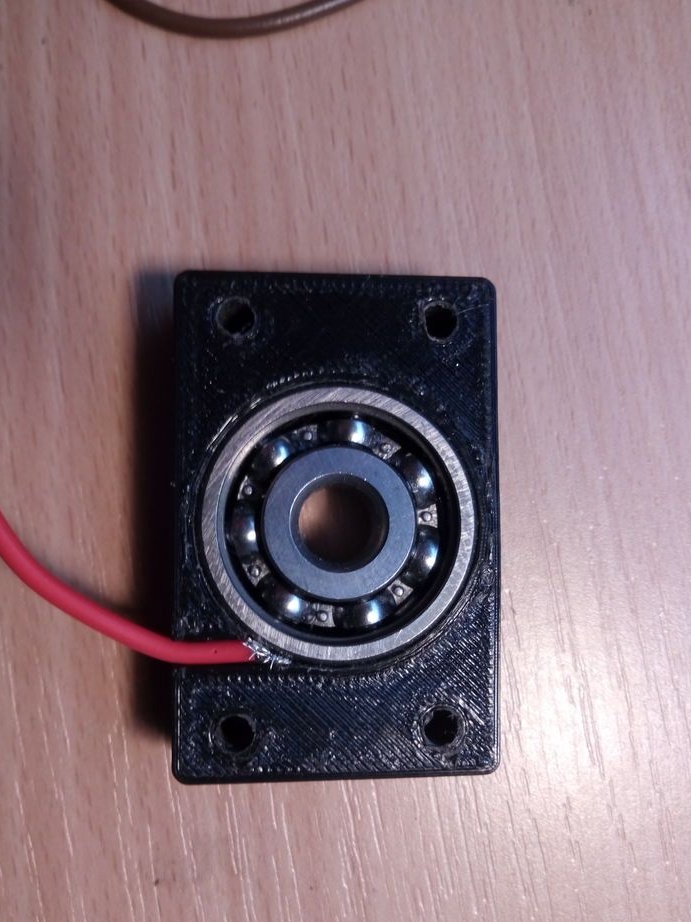
Минусната мощност се поставя в специален канал и се притиска към лагера в скобата, който може да бъде отпечатан на принтер. Скоба STL файл в архив.


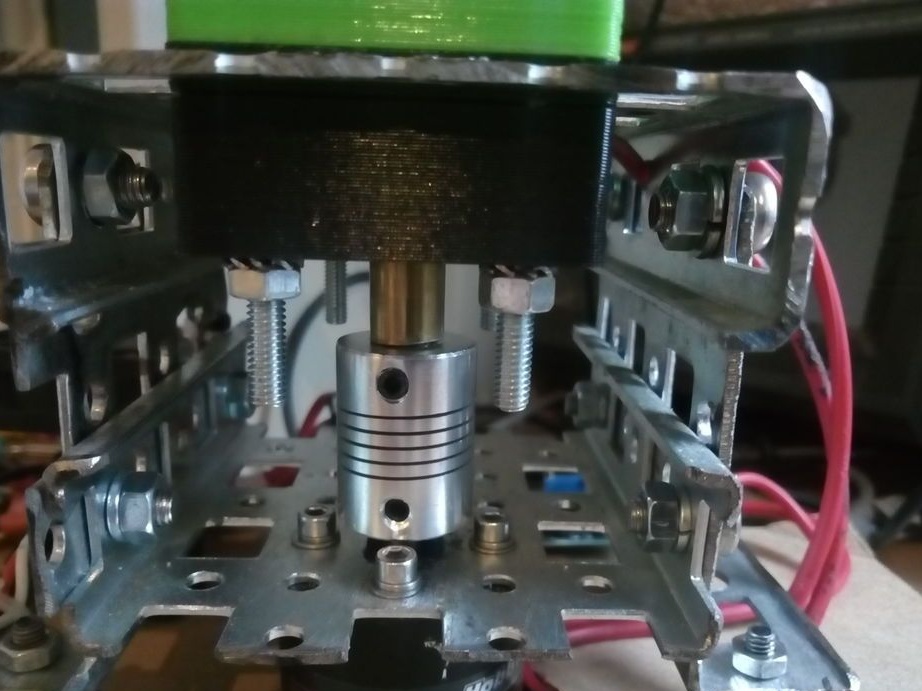
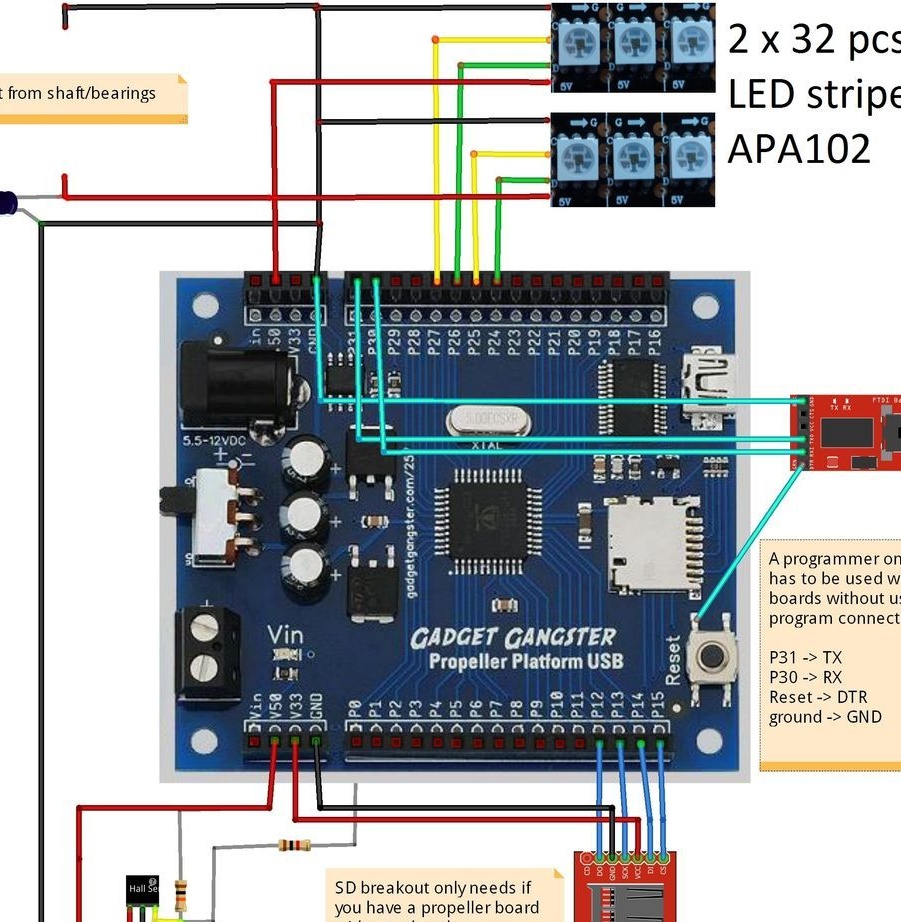
Сега трябва да свържете електродвигателя, както е показано на диаграмата.
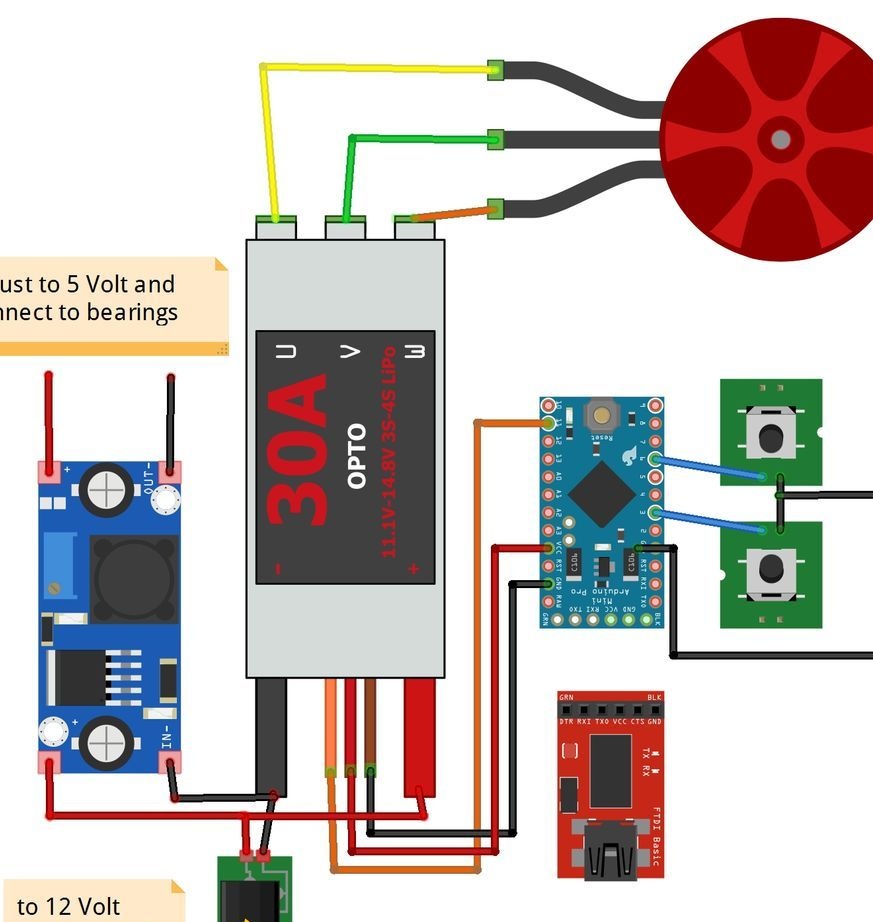
Два бутона на диаграмата се използват за регулиране на скоростта. Когато включите захранването, ESC ще получи стойност от 500 μs. Натиснете един от бутоните, за да включите двигателя. Скицата ще приеме стойността „StartPos = 625“. По-късно, когато регулирате скоростта, тази стойност може да бъде променена. Натиснете бутона за две секунди и двигателят трябва да спре.
Сглобяване на основната конструкция.
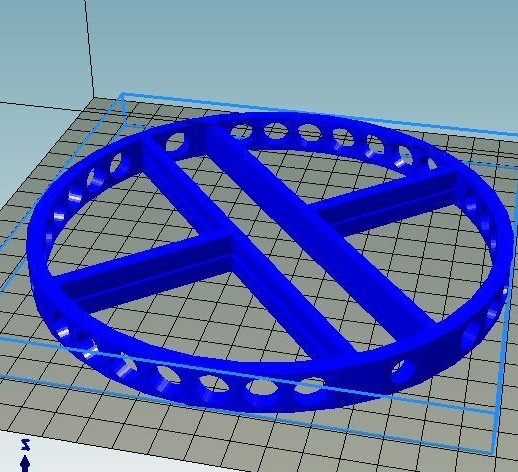

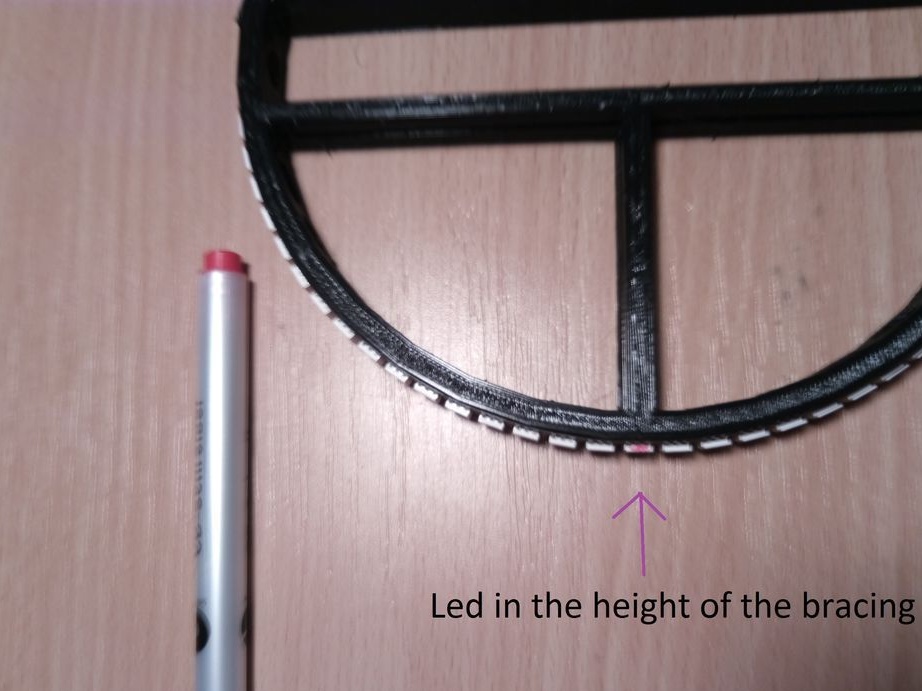
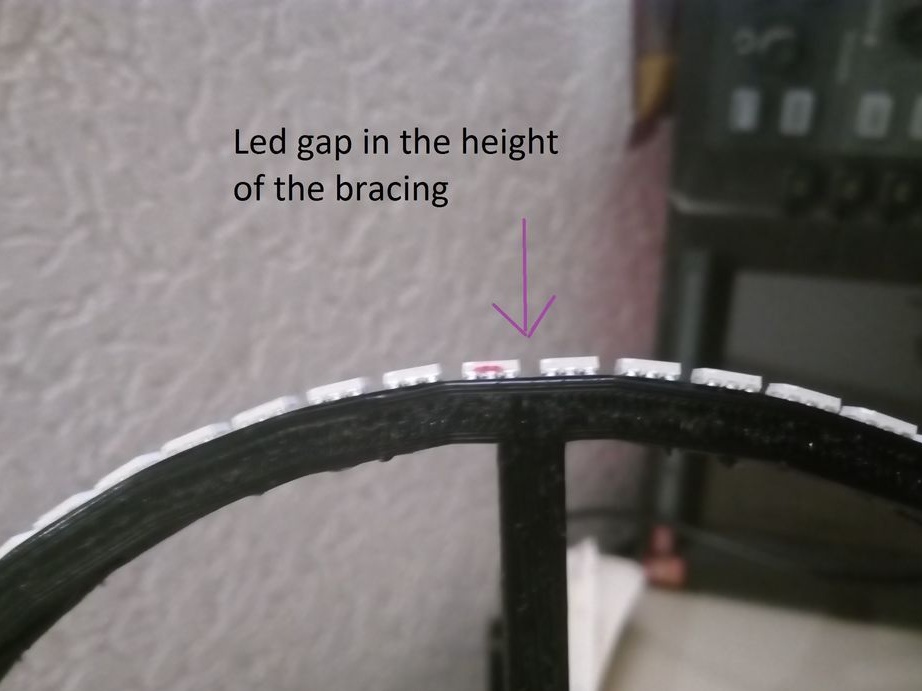


За целта отпечатайте самия пръстен от прикачения файл. Авторът направи много дупки в него, за да намали теглото си. Можете да използвате парче PVC тръба. Две ленти от 32 светодиода са изрязани. Две ленти от светодиоди образуват четни и нечетни линии. Подредете лентите така, че светодиодите на едната лента да са разположени между светодиодите на другата, но на обратната страна. След като закрепите лентата, можете да свържете светодиодите на платката на контролера. И тогава трябва да балансирате целия монтаж.
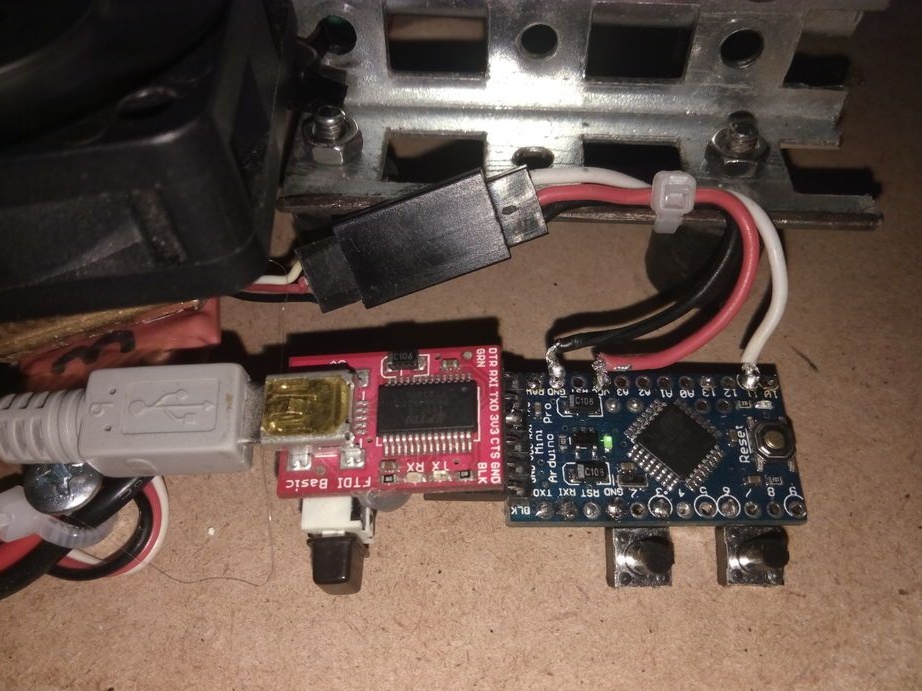
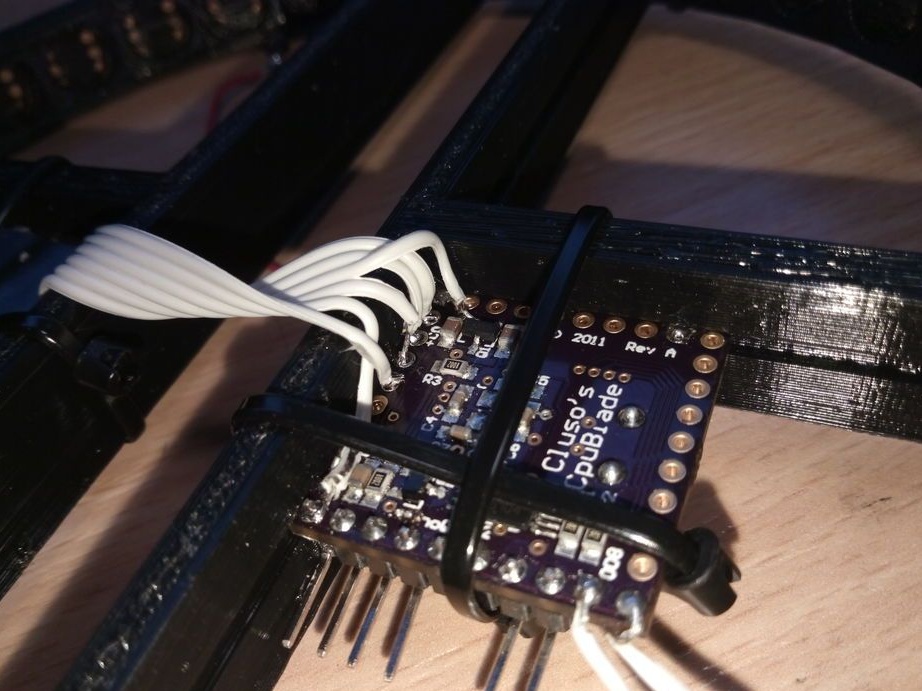
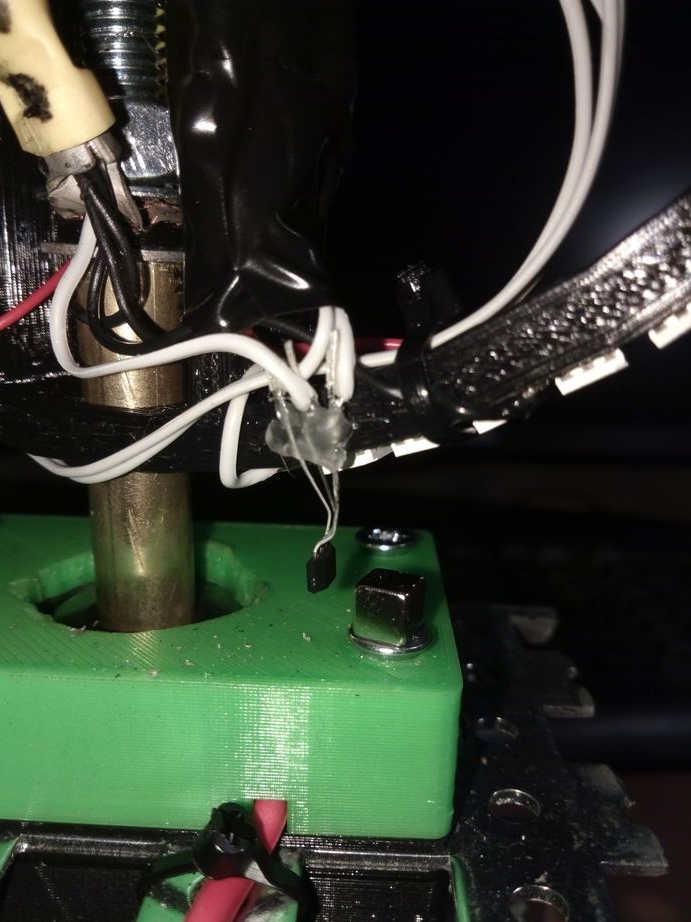
Следващите снимки показват как да свържете всички компоненти на устройството заедно. Снимката показва и инсталирания сензор за зала с магнит.
За да програмирате Parallax Propeller Microcontroller, от който се нуждаете
НЕ свързвайте вашето оборудване към USB или сериен порт, докато не инсталирате софтуера. Повече подробности за качването на фърмуер в Parallax можете да намерите
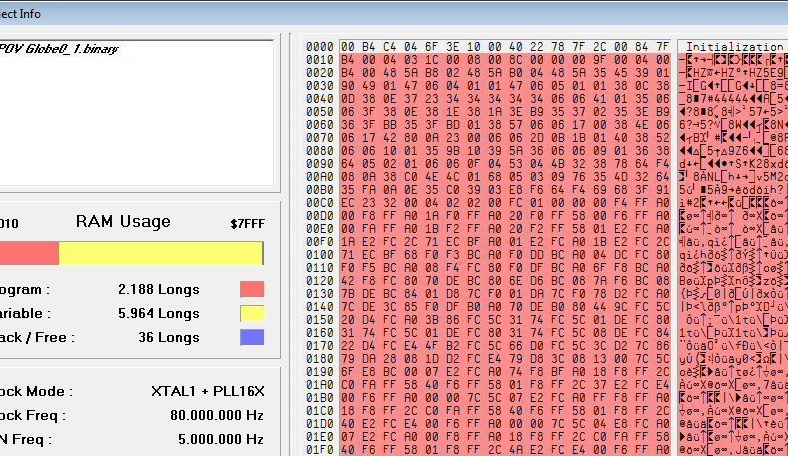
Авторът използва по-стар и, съответно, по-малко икономичен по отношение на консумацията на енергия, MCU платка, тъй като не може да намери нови библиотеки на новите контролни платки.
След като съберете и свържете всичко, трябва да програмирате контролера. Авторът прави това с помощ. Файлове с фърмуер в архива.
Сега можете да опитате да стартирате устройството. Отначало копирайте тестовата картина на SD картата и я поставете в слота.
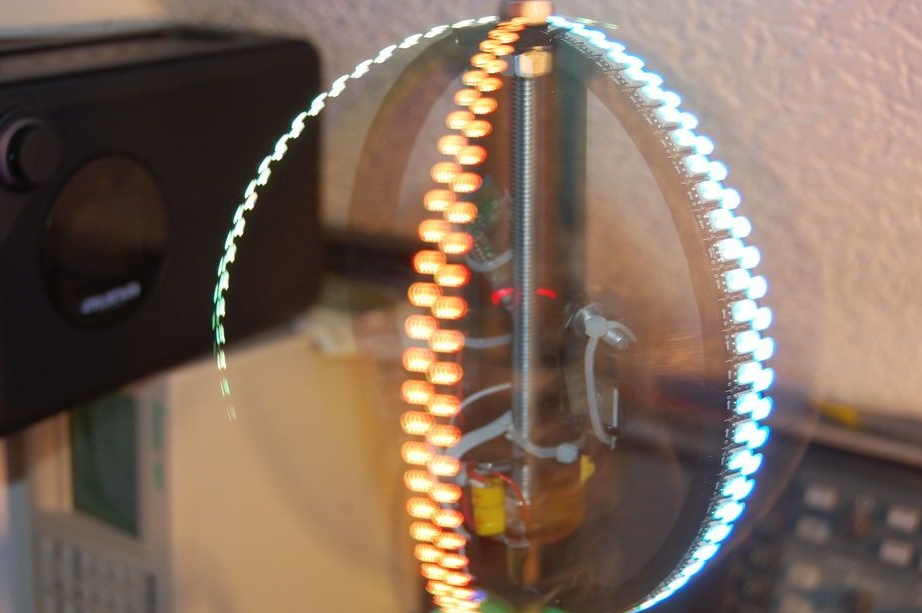
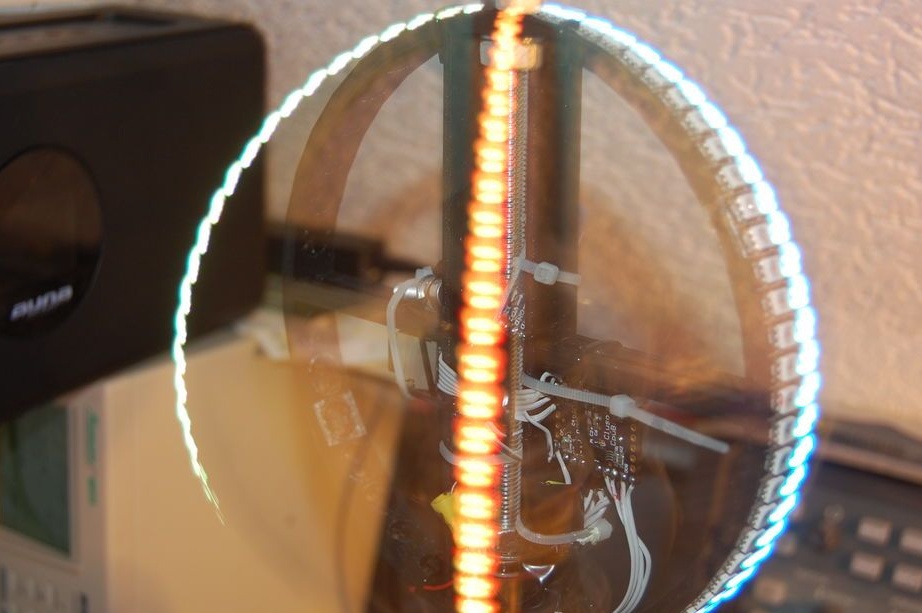
• Ако завъртите пръстена на ръка, светодиодите трябва да мигат всеки път, когато сензорът на хола премине магнита
• Включете двигателя. Увеличавайки скоростта с бутоните, е необходимо да се гарантира, че светодиодите светят, както е показано на 2 снимки
• Свържете терминала Arduino към контролера на двигателя.
• Запомнете показаната стойност.
• Спрете двигателя
• Напишете предварително запаметената стойност в променливата "startPos"скица POV_MotorControl
• Програмирайте Arduino отново.
Следващия път моторът ви стартира веднага с правилната скорост. Сега можете да "Запълнете" на картата всяко изображение. За да направите това, променете размера на изображението с 120x64 пиксела, завъртете изображението обратно на часовниковата стрелка с 90 градуса и огледало вертикално. Намалете яркостта на изображението, тъй като светодиодите са много ярки. За да направите това, по-добре е да използвате гама корекция с коефициент 0,45.
Запазване на изображението като BPM 24-битов без компресия, След всички манипулации изходният файл ще бъде с размер 23094 байт.



